(54)
1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения машинно-тракторных агрегатов на рабочем гоне и поворотной полосе.
Известно устройство для автоматического направления движения тракторного агрегата, содержащее копирующий механизм в виде двух ультразвуковых высотомеров, один из которых располагается над бороздой а второй над невспаханным участком поля 1.
Недостатком данного устройства является невозможность совместного функщюнирования с устройствами для автоматического вождения на поворотной полосе в составе систеMbs автоматического вождения машинно-тракторного агрегата.
Наиболее близким по технической сущности к предлагаемому является устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе, содержащее схему управления, вклютающую задатчики длительности реализации элементов траекторий поворотов, подключенных к логической схеме, связанной с переключателем режимов функционирования, формирователи управляющих сигналов, блок сравнения, задатчик интенсивности управляющего воздействия, связанный, с переключателем режимов функционирования и с исполнительным механизмом рулевого управления трактора, и датчик обратной связи, имеющий механическую связь с трактором и электрическую с блоком сравнения 2.
Недостатком данного устройства является то, что данное устройство ш зволяет автоматизировать процесс вождения агрегатов только на поворотных полосах.
Цель изобретения - обеспечение автоматячес кого вождения машинно-тракторного агрегата на рабочем гоне и поворотной полосе.
Цель достигается тем, что устройство снабжено связанными с формирователями управляющих сигналов ультразвуковыми, датчиками, подключенным ко входам последних задающим генератором, соединенным со входом переключателя режимов функционирования блоком телеуправления, блоком стабипизаУСТРОЙСТВО ДЛЯ ВОЖДЕНИЯ КО.ПЕСНОГО МАШИННО-ТРАКТОРНОГО АГРЕГАТА НА РАБОЧЕМ ГОНЕ И ПОВОРОТНОЙ ПОЛОСЕ
ции и связанными с шм блоком сравнения и усилителем, другой вход которого соединен с одним из выходов переключателя режимов функционирования, а выходы - с исполнительным механизмом, причем второй вход переключателя режимов .функционирования связан со входом задающего генератора, а третий выход - со входом блока стабилизации, соединенного с датчиком обратной связи, при этом ультразвуковые датчики располо жены поперек направления движения машинно-тракторного агрегата, один перед последним а другие - за ним.
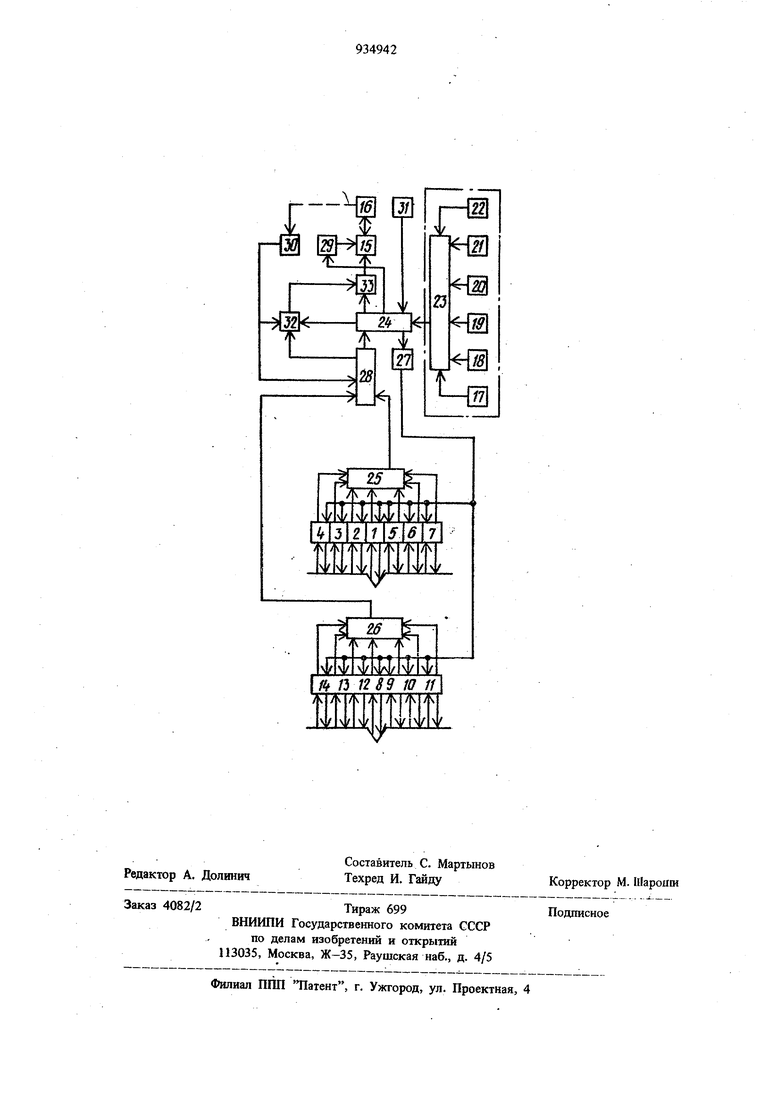
На чертеже представлена блок-схема устройстЬа для вождения колесного машиннотракторного агрегата на рабочем гоне и поворотной полосе.
Устройство содержит ультразвуковые датчики 1-14, схему управления и исполнительный механизм 15 рулевого управления трактора 16. Схема управления включает задатчики длительности реализации элементов поворотов 17-22, подключенные к логической сКеме 23, переключатель режимов функционирования 24, формирователи управляющих сигналов 25 и 26, задающий генератор 27, блок сравнения 28, задатчик интенсивности управляющего воздействия 29, датчик обратной связи 30, блок телеуправления 31, блок стабилизации 32 и усилитель 33.
К входам переключателя режимов функционирования 24 подключены логическая схема 23, блок телеуправления 31 и блок сравнения 28, а к выходам - усилитель 33, связанный с исполнительным механизмом 15, блок стабилизации 32, соединенный с усилителем 33, с задатчиком обратной связи 30 и с блоком сравнения 28, задатчик интенсивности управляющего воздействия 29, связанный с исполнительным механизмом 15 и задающий генератор 27, выход которого соединен со входами ультразвуковых датчиков 114, связанных с формирователями управляющих сигналов 25 и 26, которые подключены к блоку сравнения 28, соединенному с датчиком обратной связи 30, имеющим механическую связь с трактором 16.
Ультразвуковые ; атчики расположены поперек направления движения машинно-тракторного агрегата в два ряда: один ряд - датчик 1-7 - перед агрегатом, а другой - датчики 8-14 - за 1шм, причем количество датчиков выбирается в зависимости от величины зоны рассеивания фактических траекторий движения агрегата.
Устройство работает следующим образом. Перед началом работы вычисляются значения длительности реализации элементов поворотов, ширины поворотной полосы, интенсивности управляющего воздействия на колеса трактора при движении его на повороте, выполняются регулировки задатчиков длительности 17-22 и интенсивности управляющего
воздействия 29.
Исходными данными для расчета являются результаты пробных заездов а также значение ширины поворота для выбранных из условий агротехники способ и скорости движения;
затем размечаются и обозначаются проходом специального слёдообразователя контрольная поворотной полосы и базовая линия первого рабочего прохода, навешивается на трактор (или прицепляется) сельскохозяйственг
j ная машина со следообразователем. МТА перегоняется к месту работы, вводится в рабочий гон, так чтобы передний и задний ряды , ультразвуковых датчиков 1-14 находились над бороздой. Водитель покидает кабину и с помощью носимого управляющего прибора и блока телеуправления 31 заглубляет- рабочие органы и пускает трактор (соответствующие блоки на чертеже не показаны). Происходит процесс автоматического вождения МТА на рабочем гоне. Если датчики 1 и 8 находятся над . бороздой базовой линии и задержка импульсов от них больще, чем от остальных, то это .означает движение МТА точно по заданной траектории, при этом формирователи управляющих сигналов 25 и 26 выдают блоку сравнения 28 сигналы Нуль. Если базовая линия в стороне и над ней оказывается датчик в переднем ряду 5-7 - из правой части, а в заднем 12-14 - из левой части, то формирователи 25 и 26 формируют положительный сигнал для поворота направляющих колес вправо; если над базовой линией оказывается один из датчиков 4, 3, 2 левой части переднего ряда и один из датчиков 9, 10, 11 из правой части заднего ряда, то формирователи 25 и 26 формируют отрицательный сигнал для поворота колес влево. Ультразвуковые датчики 1-14, состоящие из излучателей и приемников, преобразуют электрические сигналы, получаемые от задающего генерато5 ра 27, в ультразвуковые колебания, направТляют их к почве, принимают отраженные сигналы и преобразуют их в электрические, которые поступают в формирователи 25 и 26, где по времени сравниваются с поступлением
0 сигналов от задающего генератора 27. Запаздывание сигнала от датчика относительно поступления сигнала от генератора характеризует расстояние от датчика до поверхности поля. Сравнивая задержки различных датчиков, формирователи управляющих сигналов определяют расположение базовой линии и вьщают сигналы, соответствуюадае выравниванию курса. БЛОК сравнения 28 принимает управляющие
сигналы и формирует команды на поворот МТА вправо или влево, а также команду включения блока стабилизаицш 32, который получает информацию от датчика обратной связи 30 о положении направляющих колеС, формирует сигнал на возврат их в среднее положение и направляет его к усилителю 33 Сигналы от формирователей 25 и 26 пропорциональны по амплитуде боковому отклонению МТА от базовой линии. Если над бороздой базовой линии находятся датчики 2,9,5 и 12, то формирователи выдают напряжение 2В, если датчики 3,6, 10 и 13 - 4 В, если датчики 4,7, 11 и 14 - 6 В. Блок сравнения 28, формируя команды в виде релейных электрических сигналов, сравнивает напряжения, поступающие от формирователей 25 и 26 и датчика обратной связи 30, выполненного в виде вращающегося трансформатора с напряжением на выходе, пропорциональным углу поворота направляющих колес. Он выдает команды только, если напряжение от датчика 30 меньще напряжения от формирователей 25, 26. Команды от блока сравнения 28 через переключатель режимов функционирования 24 и усилитель 33 подаются на исполнительный механизм 15. Происходит корректировка траектории рабочего прохода af регата,
Как только передний ряд ультразвуковых датчиков 1-7 оказывается над поперечной бороздой контрольной линии поворотной полосы сигналы от них поступают со значительным опозданием на вход формирователя 25. Это приводит к формированию сигнала переключения режимов функционирования,, сравнению его с сигналом от формирователя 26 и выдаче блоком сравнения 28 на вход переключателя 24, команды к переключению, а затем к отключению задающего генератора 27 и подключению логической схемы 23 с задатчиками длительности реализации элементов поворотов 17-22. Начинается отработка программы поворота. Задатчики 17-22 по мере окончания отсчета заданного времени выдают логической схеме 23 электрические сигналы. Логическая схема 23 формирует управляющие сигналы и через переключатель 24, усилитель 33 управляет -исполнительным механизмом 15. Поднимаются рабочие органы, поворачиваются направляющие колеса, происходит движение По траектории поворота.
По окончании программы повсфота по команде логической схемы 23 переключатель режимов функционирования 24 отключает логическую схему 23 с задатчиками 17-22 и
934942.6
включает задающий генератор 27. В этот момент трактор подощел к базовой линии нового рабочего гона, .так, что, несмотря на случайное боковое смещение, борозда находится 5 Д одним из ультразвуковых датчиков. Виовь начинается процесо автоматического Рождения кгелесного мащинно-тракторного агрегата на рабочем гоне.
10
Формула изобретения
1. Устройство для вождения колесного мащинно-тракторного агрегата на рабочем гоне и
поворотной полосе, содержащее схему управления, включающую задатчики длительности реализации элементов траектории поворотов, подключенных к тгогической схеме, связанной с переключателем режимов функционирования,
формирователи управляющих сигналов, блок сравнения, задатчик интенсивности управляющего воздействия, связанный с переключателем режимов функционирования и исполнительным механизмом рулевого управления трактора, и датчик обратной связи, имеющий меха. ническую связь с тргастором и электрическую.
с блоком сравнения, отличающееся
тем, что, с целью обеспечения автоматического
вождения мащинно-тракторного агрегата на рабочем гоне и поворотной полосе, устройство снабжено связанными с формирователями управляющих сигналов ультразвуковыми датчиками, подключенным к входам последних задаюищм генератором, соединенным с входом переключателя режимов функционирования бпоком телеуправления, блоком стабилизации и связанными с ним блоком сравнения к усилителем, другой вход которого соединен с одним из выходов переключателя режимов функционирования, а вход - с исполнительным механизмом, причем второй выход переключателя режимов функционирования связан с входом задающего генератора, а третий выход - с входом блока стабилизации, соединеняого с датчиком обратной связи.
2. Устройство по п. 1, о т л и ч а ю щ ее с я тем, что ультразвуковые датчики расположены поперек направления движения мащинно-тракторного агрегата, одни перед последним, а другие - за ним.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР N231917, кл. А 01 В 69/04, 1967.
2.Авторское свидетельство СССР по заявке Vf 2938707/30-15, кл. А 01 В 69/04;.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |