Известны управляющие устройства для системы автоматического регулирования, содержащие усилитель переменного напряжения, управляемый фазочувствительный демодулятор, управляемый модулятор, корректирующую цепь постоянного тока, синхронный, синфазный и квадратурный источники nepeiMennoго питающего папряжения.
Все известные устройства достаточно сложны.
Предложенное устройство отличается от известных тем, что в нем последовательно соединенные управляемый фазоч вствительный демодулятор, корректирующая цепь постоянного тока и управляемый модулятор включены между выходом усилителя переменного тока и его входом, причем управляемый демодулятор подключен к синхронному и синфазному, а управляемый модулятор - к квадратурному источникам переменного напряжения.
Это позволяет упростить устройство.
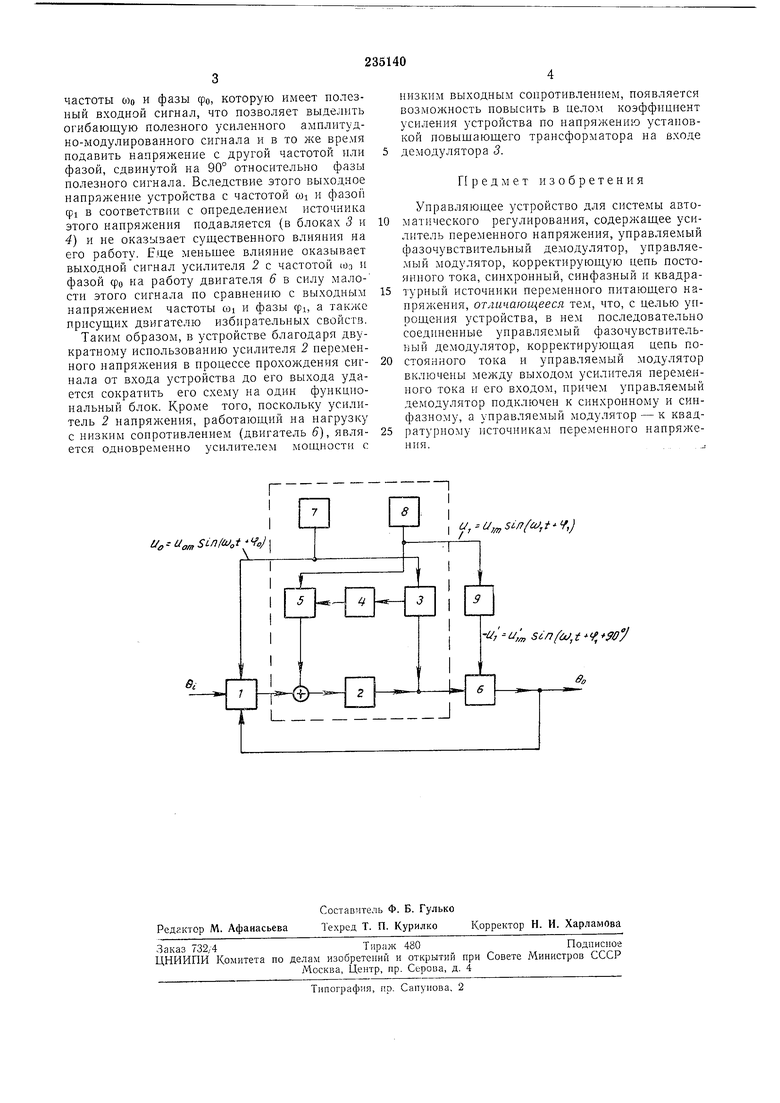
Па чертеже приведена схема устройства.
В нее входят измеритель рассогласования 1; усилитель 2 переменного напряжения; фазочувствительный управляемый демодулятор фильтрующая и корректирующая цепь 4 постоянного тока; управляемый модулятор 5; двухфазный двигатель 6 переменного тока; источник 7 напряжения питания с частотой о)о и фазой фс, синхронного и синфазного со входным
полезным сигналом (синхронный и синфазный источник); источник 8 напряжения питания с частотой (0 и фазой ф1, асинхронного или квадратурного (сдвинутого по фазе на 90°) по
отнощению к выходному напряжению синхронного и синфазного источника (квадратурный источник); фазосдвигающее устройство 9.
Работа устройства происходит следующим образом.
Сигнал с измерителя рассогласования 1 в виде напряжения с частотой соо и фазой фо поступает в усилитель 2, а затем, возросший по уровню, в демодулятор 3. Выходное напряжение демодулягора 3 фильтруется и корректируется корректирующей пепью 4, после чего подается па вход модулятора 5, запитанного от квадратурного псточника. Здесь полезное напряжение снова преобразовывается в амплитудно-модулированный сигнал, но уже с частотой wi и фазой ф. В такой форме сигнал вторично подается на вход усилителя 2 и затем, усиленный, в качестве управляющего папряжения поступает на двигатель 6. Обмотка возбуждения двигателя 6 запитана от квадратурного источника 8 через фазосдвигающее устройство 9, обеспечивающее сдвиг фазы напряжения возбуждения величиной 90° относительно напряжения управления двигателя. Демодулятор 3 управляется от синхронного и
частоты 0)0 и фазы фо, которую имеет полезный входной сигнал, что позволяет выделить огибающую полезного усиленного амплитудно-модулированного сигнала и в то же время подавить напряжение с другой частотой или фазой, сдвинутой на 90° относительно фазы полезного сигнала. Вследствие этого выходное напряжение устройства с частотой oji и фазо11 ф1 в соответствии с определением источника этого напряжения подавляется (в блоках 3 и 4 и не оказывает существенного влияния на его работу. Еще меньщее влияние оказывает выходной сигнал усилителя 2 с частотой юэ и фазой фо на работу двигателя 6 в силу малости этого сигнала по сравнению с выходным напрял ением частоты coi и фазы ф1, а также присущих двигателю избирательных свойств. Таким образом, в устройстве благодаря двукратному использованию усилителя 2 переменного напряжения в процессе прохождения сигнала от входа устройства до его выхода удается сократить его схему на один функциональный блок. Кроме того, поскольку усилитель 2 напряжения, работающий на нагрузку с низким сопротивлением (двигатель 5), является одновременно усилителем мощности с l/a--i a nSin/ t 4 J
низким выходным соиротивлением, появляется возможность повысить в целом коэффициент усиления устройства ио напряжению установкой повыщающего трансформатора на входе демодулятора 3.
Предмет изобретения
Управляющее устройство для системы автоматического регулирования, содержащее усилитель иеременного напряжения, управляемый фазочувствительный демодулятор, управляе.мый модулятор, корректирующую цепь постоянного тока, синхронный, синфазный и квадратурный источники перемепного питающего напряжения, отличающееся тел1, что, с целью упрощения устройства, в нем последовательно соединенные унравляемый фазочувствителькый демодулятор, корректирующая цепь иостоянного тока и управляемый модулятор включены между выходом усилителя переменного тока и его входом, причем управляемый демодулятор подключен к синхронному и сипфазному, а управляемый модулятор - к квадратур}1ому источникам переменного напряжеНII я. I f, т sinfoj, t оУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2276370C1 |
| Когерентный супергетеродинный спектрометр электронного парамагнитного резонанса | 2015 |
|
RU2614181C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ВИБРАЦИОННОГО ТИПА | 2005 |
|
RU2282152C1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1582292A1 |
| Устройство подавления квадратурной помехи в усилителе следящей системы | 1977 |
|
SU866761A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
