и„
R
где R - активное сопротивление дополнительной обмотки 15 возбуждения о
Рассмотрим в качестве датчика 13 положения бесконтактный сйнусно-ко- синусный вращающийся трансформатор типа редуктосин,
Потокосцепление синусной 16 и косинусной 17 обмоток редуктосина определяется токами взаимно перпендикулярных обмоток 14 и 15 возбуждения в соответствии с выражениями:
V«- -кмс iySinOny+e) +
4S
вращения ротора 2„
Выражение (6) получено в соответствии с правилом дифференцирования сложной функции
Подставляя в (6) выражение (4)9 получим после преобразований:
50
Ч UW
U
,+ U
(7)
e UH c
К«Ј
L
H (M u (HJ Ausincot sin m if °
55
синфазная высокочастотная составляю
K,
ran
L u
(8)
AyCoswt cos m
квадратурная высокочастотная составляющая;(9)
У к кмс™- Л sin m cf - низкоRчастотная составляющая
(to)
Синфазная (8) и квадратурная (9) составляющие определяются относительно фазы опорного напряжения Uon,
Для нормальной работы вентильного электродвигателя частота опорного напряжения выбирается гораздо больше частоты вращения синхронного двигателя 1 (обычно на два порядка):
w Д
(И)
Таким образом, фильтр 22 нижних частот выделит только низкочастотную составляющую (10), сформировав на своем выходе напряжение Фаза и форма которого определяются передаточной функцией фильтров 22 и 23 нижних частот,
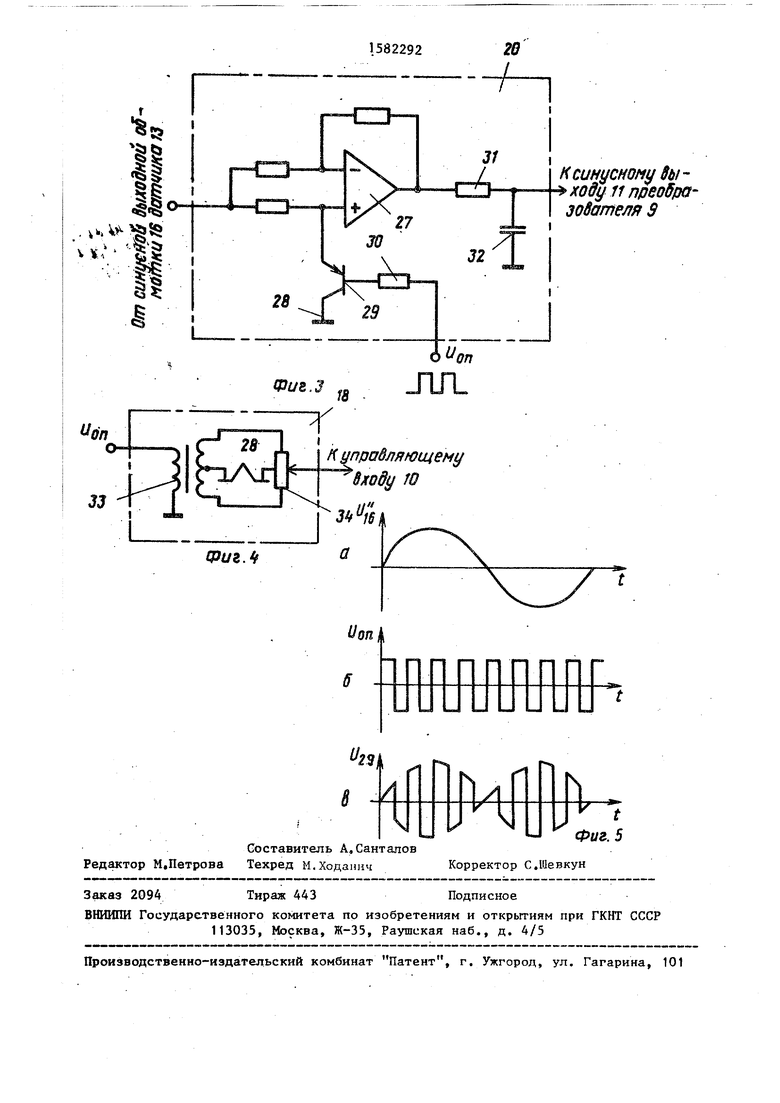
Фазочувствительный выпрямитель 20 выделяет огибающую синфазной составляющей (8) высокочастотного сигнала и подавляет квадратурную составляющую (9) высокочастотного сигнала, а также низкочастотную составляющую (10)о Форма и фаза напряжения 1Ь0 на его выходе определяется передаточной функцией выпрямителя 20,
Подавление низкочастотной сос- тавляющей (10 ) в фазочувствителъном выпрямителе 20, показанном на фигвЗ объясняется тем, что относительно этой составляющей фазочувствитель- ный выпрямитель 20 работает как модулятор, формирующий переменное напряжение с нулевым средним значением0 Это переменное напряжение подавляется фильтром нижних частот на выходе самого фазочувствительного выпрямителя 20„
Действительно, если предположить, что транзистор 29 (фиг03) открывается напряжением отрицательной полярности на его базе и закрывается - положительной, то при положительной полярности опорного напряжения Uon (фиг,56) операционный усилитель 27 работает в неинвертирующем режиме и напряжение на его выходе () соответствует входному напряжению Цц При отрицательной полярности
напряжения Uen транзистор 29 открыт,) операционный усилитель 27 работает в инвертирующем режиме и напряжение на его выходе (фиг.Зв) имеет обратный знак по сравнению с его входным напряжением Uf „ Как видно из фиг„5в, среднее значение напряжения равно нулю, поэтому на выходе фильтра
нижних частот, на резисторе 31 и конденсаторе 32 напряжение отсутствует„ Таким образом, фазочувствительные выпрямители 20 и 21 подавляют низкочастотную составляющую входного сиг5 нала,,
Следовательно, на выходе 11 преобразователя 9 координат будет выделена огибающая синфазной высокочастотной составляющей сигнала (8), а на
Q выходе фильтра 22 нижних частот - низкочастотная составляющая (10). Таким образом, на выходе блока 7 сравнения напряжение примет вид:
и7 и(Г и
21
к
№мсАт
АУ KwUo г
-л- Я. )sin
RТ
(12)
где К и К н - коэффициенты передачи фазочувствительного выпрямителя 20 и фильтра 22 нижних частот соответственное
Аналогичным образом может быть получено напряжение на выходе блока 8 сравнения;
Ug U11- U13 АУ
40
К н Uon ч --- 51) cos .
(13)
5
Выражения (12) и (13) показывают что в электродвигателе осуществляется введение отрицательной обратной связи по скоростио Для обеспечения стабильности скорости вращения глубина обратной связи по скорости выбирается достаточно большой. Это дос- 0 тигается, например, подбором коэффициента усиления усилителей 5 и 6 мощности, а также регулировкой напряжения Uc от источника 9 постоянного тока о
Для обеспечения высокой точности необходимо обеспечить равенство фазо- частотных характеристик фильтров 22 и 23 нижних частот и фаэочувствительных выпрямителей 20 и 21, что достигается выбором их параметров
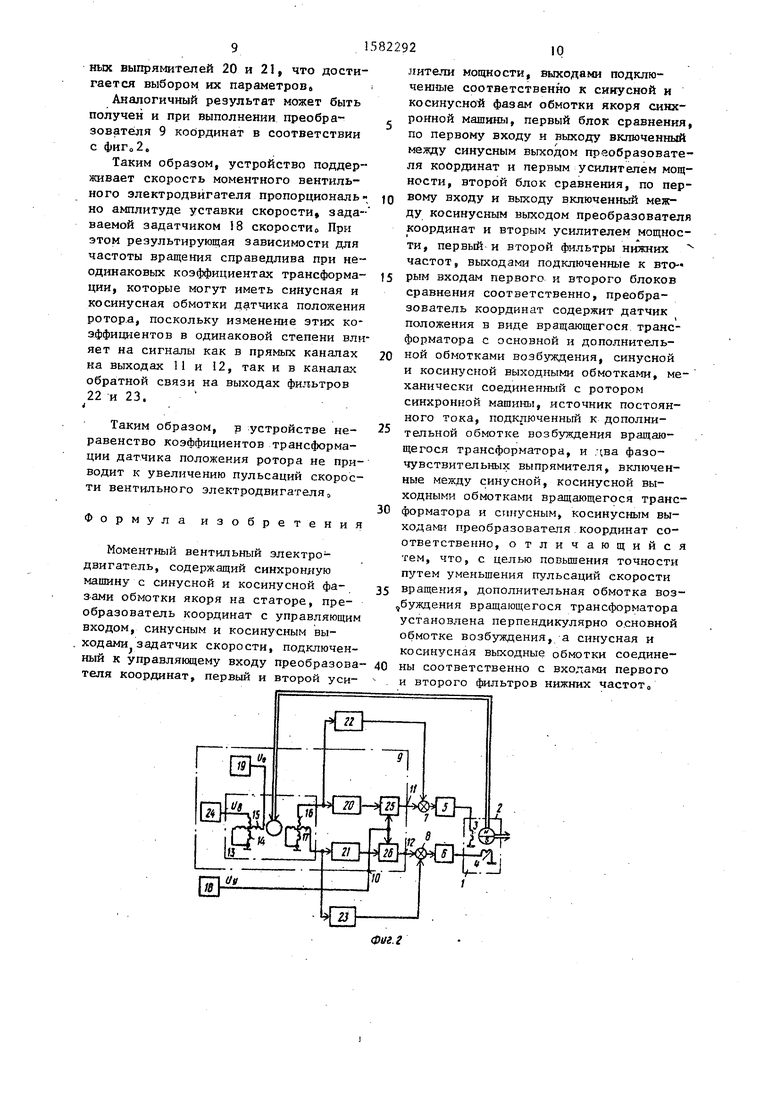
Аналогичный результат может быть получен и при выполнении преобразователя 9 координат в соответствии с фиг02.
Таким образом, устройство поддерживает скорость моментного вентильного электродвигателя пропорционально амплитуде уставки скорости, зада- ваемой задатчиком 18 скорости0 При этом результирующая зависимости для частоты вращения справедлива при неодинаковых коэффициентах трансформации, которые могут иметь синусная и косинусная обмотки датчика положения ротора, поскольку изменение этих коэффициентов в одинаковой степени влияет на сигналы как в прямых каналах на выходах 11 и 12, так и в каналах обратной связи на выходах фильтров
22 и 23.
t
Таким образом, в устройстве неравенство коэффициентов трансформации датчика положения ротора не приводит к увеличению пульсаций скорости вентильного электродвигателя,;
Формула изобретения
Моментный вентильный электродвигатель, содержащий синхронную машину с синусной и косинусной фазами обмотки якоря на статоре, преобразователь координат с управляющим входом, синусным и косинусным вылители мощности, выходами подключенные соответственно к синусной и косинусной фазам обмотки якоря синхронной машины, первый блок сравнения, по первому входу и выходу включенный между синусным выходом преобразователя координат и первым усилителем мощности, второй блок сравнения, по первому входу и выходу включенный между косинусным выходом преобразователя координат и вторым усилителем мощности, первый и второй фильтры нижних частот, выходами подключенные к вто-«
5 рым входам первого и второго блоков сравнения соответственно, преобразователь координат содержит датчик положения в виде вращающегося трансформатора с основной и дополнитель0 ной обмотками возбуждения, синусной и косинусной выходными обмотками, механически соединенный с ротором синхронной машины, источник постоянного тока, подключенный к дополни5 тельной обмотке возбуждения вращающегося трансформатора, и чва фазо- чувствительных выпрямителя, включенные между синусной, косинусной выходными обмотками вращающегося транс0 форматора и синусным, косинусным выходами преобразователя координат соответственно, отличающийся тем, что, с целью повышения точности путем уменьшения пульсаций скорости
5 вращения, дополнительная обмотка воз- буждения вращающегося трансформатора установлена перпендикулярно основной обмотке возбуждения, а синусная и
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU972646A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
Изобретение относится к вентильным электродвигателям. Цель изобретения - повышение точности путем уменьшения пульсаций скорости вращения. Электродвигатель содержит двухфазную синхронную машину 1, подключенную через усилитель 5, 6 мощности синусного и косинусного каналов усиления к преобразователю 9 координат с датчиком положения, выполненным на бесконтактном вращающемся трансформаторе с двумя обмотками возбуждения: основной 14 и дополнительной 15. Основная обмотка возбуждения подключена к задатчику 18 скорости, а дополнительная обмотка - к источнику 19 постоянного тока. Такое включение приводит к формированию в сигналах выходных обмоток вращающегося трансформатора составляющих, пропорциональных угловой скорости, которые используются для введения тахометрической обратной связи, обеспечивающей стабилизацию скорости вращения. Выполнение дополнительной обмотки возбуждения, перпендикулярной основной обмотке, позволяет вводить синусную и косинусные составляющие угловой скорости вращения в одноименные каналы усиления, что устраняет влияние неравенства коэффициентов трансформации выходных обмоток вращающегося трансформатора на пульсации скорости. 5 ил.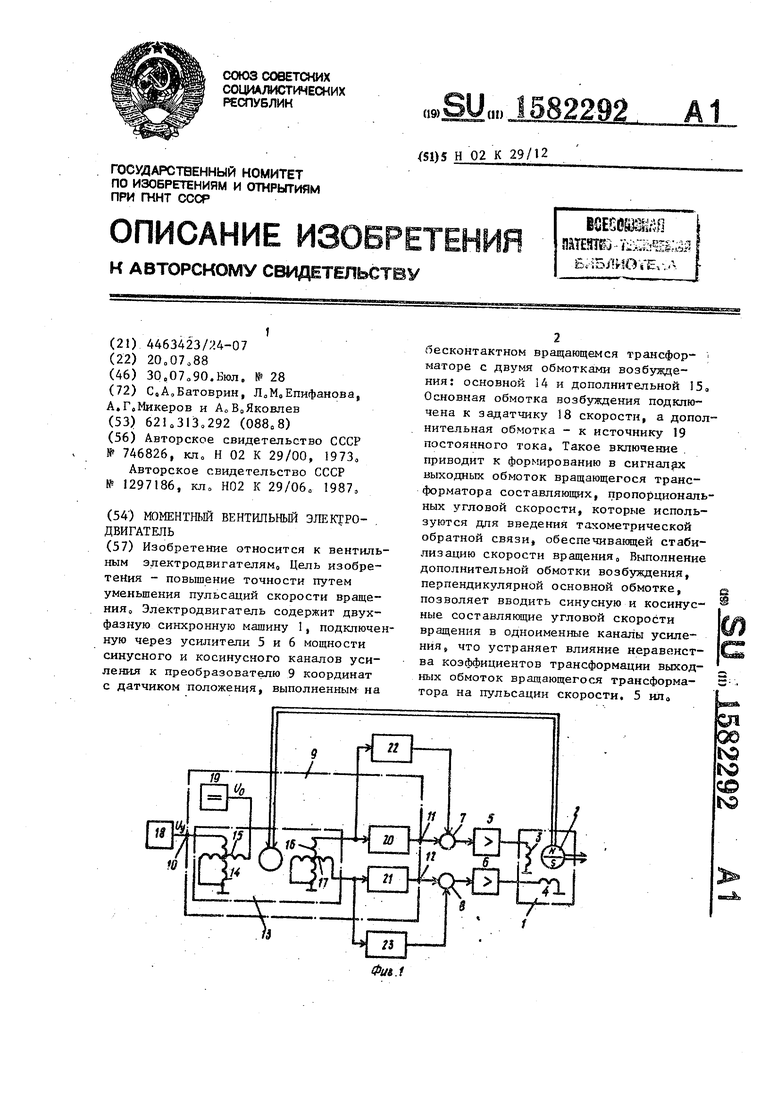
ходами задатчик скорости, подключенкосинусная выходные обмотки соединеный к управляющему входу преобразова- 40 ны соответственно с вхолами первого теля координат, первый и второй уси- ч и второго фильтров нижних частот,,
Фиё.З
1В
К управляющему 6ходу го
33
ц Н
ЗЬи1Ц
Фиг Л
Редактор М.Петрова
Составитель А,Санталов Техред М.Ходаиич
К синусному 8ы- ъ ходу 11 преобразователя $
Un
NHfe
t
Фиг.. 5
Корректор С.Шевкун
| Электропривод | 1973 |
|
SU746826A1 |
