Изобретение относится к измерительной технике и может быть использовано в метрологических устройствах для измерения формы поверхности реальных тел вращения неправильной формы и их поведения в процессе эксплуатации - некруглости в поперечном сечении (конусность, бочкообразность и пр.), биение рабочей поверхности относительно посадочных шеек под подшипники, реальную пространственную форму оси детали, колебания при вращении тела, в том числе опирающегося на два опорных ролика, приводящих его во вращение.
Известно устройство для измерения формы поверхности крупногабаритных изделий (Патент RU №2179705, G 01 В 5/207, 7/287). Устройство состоит из жесткого корпуса с двумя опорами на роликах. На корпусе имеются индикаторы, установленные между опорами через равные промежутки. Индикаторы дополнены фотоэлектрическими датчиками, которые соединены с устройством сопряжения с персональным компьютером. Последний по ходу движения ролик дополнен фотоэлектрическим датчиком, который соединен с устройством сопряжения.
Устройство работает следующим образом. Корпус устройства устанавливают на исследуемое изделие таким образом, чтобы ролики касались измеряемой поверхности, а ролик, дополненный фотоэлектрическим датчиком, являлся последним по ходу движения. На поверхности изделия отмечают исходную точку, являющуюся точкой касания последнего по ходу движения ролика и измеряемой поверхности. Затем корпус перемещают по выбранной на поверхности траектории движения в заданном направлении. Показания индикаторов хранят в устройстве сопряжения. Для этого используют фотоэлектрические датчики, которые отслеживают изменение показаний измерительных головок. Фотоэлектрический датчик выдает импульс в момент завершения каждого полного оборота последнего по ходу движения ролика. По фронту этого импульса, например, положительному, устройство сопряжения выполняет передачу показаний индикаторов персональному компьютеру, который фиксирует в памяти показания индикаторов в каждый момент измерений. Измерение формы поверхности завершают после того, как корпус устройства переместят из начальной точки выбранной траектории движения в конечную. На основании показаний индикаторов в каждый момент измерений выполняют аппроксимацию формы каждого участка поверхности в локальной (приборной) системе координат и вычисляют матрицы перехода между соседними системами координат. Затем вычисляют форму поверхности в единой системе координат. Форму поверхности задают в виде массива точек с известными координатами. Устройство и способ невозможно применить для измерения тела вращения, опирающегося на два опорных ролика, приводящих его во вращение.
Известно оптико-электронное устройство для измерения диаметров тел вращения (RU №2164664, G 01 В 11/08). Оно состоит из измерительного блока, фотоприемника, оптической системы, измеряемого тела вращения, опор измеряемого тела вращения, осветителя, датчика углового положения опор измеряемого тела вращения, аналого-цифрового преобразователя. Устройство обладает рядом недостатков: ограничена длина измеряемого тела вращения, недостаточно достоверные результаты измерения геометрии формы поверхности тела вращения вследствие непостоянства центра вращения.
Известен способ измерения геометрической формы номинально круглой цилиндрической делали и устройство для его реализации (Патент RU №2158895, 10.11.2000, G 01 В 5/20). Способ измерения геометрической формы номинально круглой цилиндрической детали включает измерение некруглости детали в поперечном сечении в процессе вращения измеряемой детали с помощью основного измерительного датчика накладного кругломера с самоустанавливающимися опорами, измерение радиального биения центра средней окружности этого профиля с помощью дополнительного датчика, а при перемещении датчиков вдоль вращающейся детали основной датчик измеряет некруглость профилей поперечных сечений и измерение радиуса средней окружности этих профилей и по величине этих измерений судят о форме профиля продольного сечения детали, а дополнительный датчик измеряет биения центров средних окружностей, по величине которых судят о прямолинейности оси детали. Устройство состоит из основного измерительного датчика накладного кругломера с самоустанавливающимися опорами, вертикальной стойки, связанной с суппортом станка, на которой установлен дополнительный датчик. С помощью основного датчика измеряют профиль сечения тела вращения, а с помощью дополнительного - биение средней окружности сечения.
Устройство и способ не позволяют измерять тела вращения неправильной формы, в том числе те, которые опираются на два ролика, и с их помощью приводятся во вращение, а также позволяет измерять поведение такого тела.
Задача, на решение которой направлено заявляемое изобретение, состоит в повышении универсальности способа и устройства за счет расширения перечня измеряемых геометрических характеристик, а также возможности кроме измерения формы тела определять его поведение в процессе эксплуатации.
Поставленная задача решается тем, что в устройстве для измерения геометрической формы цилиндрической поверхности тела вращения и его поведения в процессе эксплуатации, содержащем накладной кругломер с самоустанавливающимися опорами, в корпусе которого установлен основной измерительный датчик, датчик биения, согласно предлагаемому решению опоры накладного кругломера выполнены в виде дисков, закреплены на концах корпуса с возможностью вращения, оси дисков параллельны предполагаемой оси измеряемого тела, наконечник основного измерительного датчика соединен с измерителем, выполненным в виде диска, в котором имеется как минимум одно сквозное отверстие и ось которого параллельна осям опор, оптический датчик пути жестко соединен с осью этого диска так, чтобы при вращении диска отверстие пересекало зону измерения оптического датчика, устройство, кроме того, содержит датчик угла поворота, установленный на корпусе накладного кругломера, а наконечник датчика угла поворота жестко соединен со штангой, соединенной с корпусом накладного кругломера с возможностью качания корпуса относительно штанги в процессе измерения, и с основанием, выполненным с отверстиями для крепления и отверстием для продольного перемещения штанги, основание неподвижно соединено с поперечным суппортом станка, при этом вне корпуса расположены датчик количества оборотов измеряемого объекта и блок хранения обработки и мониторинга информации, соединенный со всеми датчиками.
Поставленная задача решается также способом измерения геометрической формы цилиндрической поверхности тела вращения и его поведения в процессе эксплуатации, включающим измерение его некруглости в поперечном сечении в процессе вращения измеряемого тела при помощи основного измерительного датчика накладного кругломера с самоустанавливающимися опорами, измерение биения с помощью датчика биения, в котором согласно предлагаемому решению устройство дополняют элементами, указанными в первом пункте, перед началом измерения наносят метку на торцевую поверхность измеряемого тела, которая служит началом и концом отсчета, при помощи поперечного суппорта станка обеспечивают контакт всех роликов с измеряемой поверхностью и в процессе вращения измеряемого тела по сигналу с датчика пути снимают показания с основного измерительного датчика, датчика биения, датчика угла поворота до тех пор, пока тело не совершит минимум один оборот, далее при помощи поперечного суппорта станка отводят прибор от измеряемой поверхности и перемещают на заданное расстояние вдоль оси измеряемого тела при помощи продольного суппорта, далее при помощи поперечного суппорта станка перемещают прибор в поперечном направлении так, чтобы обеспечить одинаковое положение прибора в радиальном направлении во всех сечениях, причем количество измерений зависит от количества сечений измеряемого тела, при этом количество оборотов в каждом сечении определяют по количеству сигналов с датчика количества оборотов, который подает сигнал при прохождении нанесенной метки мимо него и, если количество оборотов составляет более одного, то их количество подчитывают, а после измерения всего тела полученные данные обрабатываются на ЭВМ.
При контроле геометрической формы тела вращения неправильной формы помимо величины нецилиндричности представляют интерес более подробные дифференцированные геометрические характеристики формы поверхности, такие, как некруглость в поперечном сечении, форма в продольном сечении (конусность, бочкообразность, седлообразность и т.д.), отклонения от прямолинейности оси детали, биение рабочей поверхности относительно базовой.
Часто кроме формы поверхности тела вращения важно знать и кинематику этого тела, например при измерении бандажа цементной печи в процессе эксплуатации. Зная не только форму, но и кинематику, становится возможной более качественная обработка бандажа, что уменьшает колебания при работе цементной печи и, как следствие, увеличивает ее суммарный срок службы. Кроме того, зная кинематику всех бандажей печи можно посчитать оптимальное положение бандажей и тем самым, применив на практике расчеты, уменьшить колебания, увеличить срок службы печи и т.д.
С помощью предлагаемого способа и устройства можно измерить следующие отклонения от заданных геометрических характеристик формы и поверхности тела вращения неправильной формы: некруглость детали в поперечном сечении, форму профиля тела вращения в продольном сечении, отклонения от прямолинейности оси тела вращения, радиальное биение центров средних окружностей тела вращения.
Кроме всех перечисленных характеристик с помощью представленного способа и устройства возможно полное отслеживание поведения оси тела вращения неправильной формы, в том числе в случае, когда тело опирается на два приводных ролика, что повышает универсальность способа и устройства.
По полученным данным возможно построение полного трехмерного изображения тела вращения и эмуляция его поведения при вращении на ЭВМ, кроме того, по полученным данным возможна разработка программы с для токарной обработки тела вращения без демонтажа с переменной глубиной резания для обеспечения наилучшей круглости тела после обработки, что обеспечит увеличение срока службы тела.
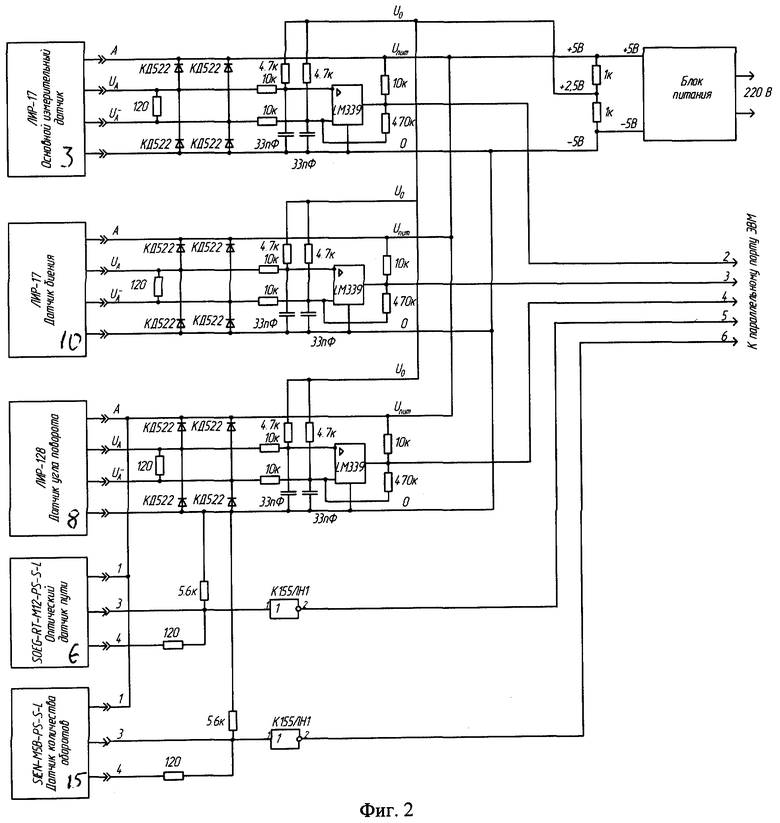
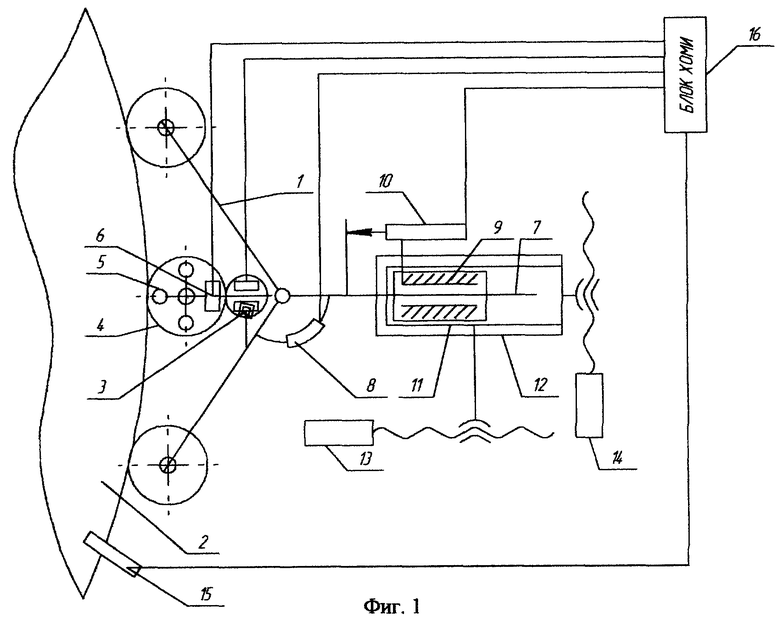
Предлагаемое изобретение поясняется чертежами. На фиг.1 представлена схема устройства, на фиг.2 представлена электронная схема интерфейсного блока.
Устройство состоит из накладного кругломера, состоящего из равноплечего корпуса 1 с самоустанавливающимися опорами, которые представляют собой диски, устанавливаемые на деталь 2. Опоры жестко установлены на концах корпуса накладного кругломера так, чтобы оси дисков были параллельны предполагаемой оси измеряемой детали и с возможностью вращения вокруг своей оси любым известным способом, например при помощи оси, которая устанавливается в корпус накладного кругломера при помощи подшипников, опоры устанавливаются на ось с натягом. В корпусе также установлен основной измерительный датчик 3, например типа ЛИР-17, измеряющий радиус средней окружности. Наконечник основного измерительного датчика 3 жестко, например, при помощи резьбового соединения, соединен с измерителем в виде диска 4, в котором имеется по крайней мере одно отверстие 5, которое при вращении диска пересекает зону измерения оптического датчика пути 6, например типа SOEG-RT-M12-PS-S-L, по сигналу с которого снимаются данные с остальных датчиков. Оптический датчик 6 жестко соединен с осью измерителя, например, при помощи П-образной рамы и расположен так, чтобы отверстие измерителя пересекло зону измерения датчика 6. Корпус соединен со штангой 7 так, чтобы было возможно осуществить возможность качания корпуса накладного кругломера относительно штанги, например, при помощи оси, которая устанавливается в корпус накладного кругломера при помощи подшипников, штанга посажена на ось с натягом. На корпусе накладного кругломера расположен датчик угла поворота 8, например типа ЛИР-128А, наконечник датчика жестко связан со штангой 7, например, при помощи штифта. Датчик угла поворота 8 регистрирует численное значение угла поворота корпуса относительно штанги. Штанга подвижно соединена с основанием 9 с возможностью продольного перемещения. Датчик биения 10, например типа ЛИР-17, который регистрирует биение тела вращения, установлен на неподвижном основании, наконечник датчика жестко связан со штангой, например, при помощи резьбового соединения. Основание 9, например призматической формы с отверстиями для крепления и отверстием для продольного перемещения штанги неподвижно соединено с поперечным суппортом станка 11, который установлен на продольном суппорте 12. Также имеются рукоятки поперечного перемещения 13 и продольного перемещения 14. В составе устройства также имеется датчик количества оборотов тела вращения 15, например типа SIEN-M5B-PS-S-L, который расположен вне корпуса накладного кругломера и производит подсчет полных оборотов тела вращения, он не связан механически с измерительным узлом. Вне корпуса кругломера также расположен блок хранения, обработки и мониторинга информации 16, который состоит из интерфейсного блока в виде электронного блока и ЭВМ, например по схеме на фиг.2. Интерфейсный блок соединен со всеми датчиками и с ЭВМ через параллельный порт.
Для подключения датчиков типа ЛИР-17 и ЛИР-128А разработчик и изготовитель этих датчиков Специальное Конструкторское Бюро Измерительных Систем с опытным производством (СКИБ ИС) и для получения на выходе прямоугольных импульсных сигналов рекомендует схему включения (http://www.skbis.ru). При этом входы U0 каждого датчика соединены вместе, входы UП каждого датчика соединены вместе, входы 0 каждого датчика соединены вместе. Выходы датчиков подсоединены к параллельному порту следующим образом: основной измерительный к входу параллельного порта номер 2, датчик биения к входу параллельного порта номер 3, датчик угла поворота к входу параллельного порта номер 4.
Оптический датчик пути и датчик количества оборотов также имеют одинаковое подключение. Входы 1 датчиков соединены вместе и подключены к UП одного из перечисленных датчиков типа ЛИР. Входы 4 датчиков соединены вместе и подключены к О одного из перечисленных датчиков типа ЛИР, через резистор 5,6 К и волновое сопротивление 120. Выходы 4 также соединены с выходом 3, который подключается к инверсному входу инвертора, например К155ЛН1, который ограничивает амплитуду сигнала с датчика. Далее выходы подключены к параллельному порту следующим образом: оптический датчик пути к входу параллельного порта номер 5, датчик количества оборотов к входу параллельного порта номер 6.
Питание схемы осуществляется от сети 220 В через блок питания (Иванов Б.С. Энциклопедия начинающего радиолюбителя. - М.: Патриот, 1992, стр. 47), при этом номинал резистора R5 подбирают так, чтобы обеспечить выходное напряжение блока - 5 В. Выходы бока питания +5В и -5В подключают ко входам делителя напряжения, состоящего из двух резисторов по 1 к. Выход делителя напряжения +5В подключен к UПИТ, выход +2,5В делителя напряжения подключен к Uо, выход -5В делителя напряжения подключен к 0.
При измерении геометрической формы детали сигналы с измерительных датчиков 3, 8, 10 поступают в блок хранения, обработки и мониторинга информации 16.
Измерение геометрических характеристик детали производят следующим образом. На измеряемом теле вращения делают радиальную метку, например в виде магнита, на удобную плоскость вне измерительного устройства устанавливают датчик количества оборотов 15 так, чтобы метка пересекала линию измерения датчика при вращении тела. С помощью поперечного суппорта 11 подводят прибор к измеряемой поверхности, обеспечивая контакт всех роликов с измеряемой поверхностью. При вращении детали (без продольной подачи) по сигналу с датчика пути 6 измерительный датчик 3 фиксирует отклонение от круглости профиля поперечного сечения тела вращения, измерительный датчик 8 фиксирует угол поворота рамы накладного кругломера 1 относительно штанги 7, что позволяет отследить поведение центра каждого сечения тела, а датчик 10 радиальное биение центра средней окружности этого же профиля.
После измерения сечения при помощи поперечного суппорта прибор отводят от измеряемой поверхности, при помощи продольного суппорта прибор перемещают в следующее сечение. При помощи поперечного суппорта подводят прибор к измеряемой поверхности так, чтобы обеспечить то же положение прибора в радиальном направлении, что и в первом сечении. Действия повторяются до тех пор, пока не будет измерено каждое сечение с заданным шагом.
По показаниям датчиков 3, 8, 10 рассчитываются координаты точек каждого сечения профиля на ЭВМ, входящем в блок ХОМИ, например по известному алгоритму, приведенному в Методике определения формы и размеров крупногабаритного тела вращения на примере бандажа. В.Н.Бондаренко, А.И.Кочетков, А.Б.Ситников. Экспресс-обзор. 2000. Серия 1, выпуск 1-2, с.13-19, после определения координат точек поверхность тела интерполируется с помощью сплайн интерполяции. По полученным данным на ЭВМ, входящим в блок ХОМИ, строится объемное трехмерное изображение тела вращения, моделируется его вращение и поведение в процессе эксплуатации.
В дальнейшем при эксплуатации тело может изменять свою форму под влиянием различных факторов, например высокой температуры, внешних воздействий и др., поэтому в процессе эксплуатации осуществляют периодическое измерение тела с целью определения необходимости корректировки его геометрических характеристик или положения в пространстве. Период измерения определяется экспериментально в зависимости от воздействующих на тело факторов.
Таким образом предлагаемое изобретение может найти применение в тех областях техники, где требуется измерять круглость сечений цилиндрических тел вращения неправильной формы, таких, как конусность, бочкообразность, седлообразность, кривизну оси детали и т.п., поведение тела, например биение одной поверхности относительно другой и т.д., в процессе эксплуатации, проводя замеры периодически. Кроме того, по результатам измерения возможно моделирование поведение этого тела в процессе вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ НОМИНАЛЬНО КРУГЛОЙ ЦИЛИНДРИЧЕСКОЙ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2158895C1 |
| НАКЛАДНОЙ КРУГЛОМЕР | 1998 |
|
RU2134404C1 |
| НАКЛАДНОЙ КРУГЛОМЕР | 2001 |
|
RU2196959C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕПРЯМОЛИНЕЙНОСТИ ДЛИННОМЕРНЫХ ДЕТАЛЕЙ | 2015 |
|
RU2617892C1 |
| Накладной кругломер | 1987 |
|
SU1471061A1 |
| НАКЛАДНОЙ КРУГЛОМЕР | 2003 |
|
RU2234674C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПОВЕРХНОСТИ ВРАЩЕНИЯ ДЕТАЛИ | 1996 |
|
RU2111089C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАБОТКОЙ СТВОЛОВ АРТИЛЛЕРИЙСКИХ УСТАНОВОК | 2017 |
|
RU2652295C1 |
| СПОСОБ РАЗНОСТНОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ КРУГЛОСТИ | 2002 |
|
RU2239785C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОЧНОСТИ ВРАЩЕНИЯ ДВУХРЯДНОГО РОЛИКОПОДШИПНИКА ПРИ ИМИТАЦИИ РАБОЧЕГО НАТЯГА | 2010 |
|
RU2451275C1 |
Изобретение относится к измерительной технике. Устройство содержит накладной кругломер с самоустанавливающимися опорами. Опоры закреплены на концах корпуса 1 с возможностью их вращения. Наконечник основного измерительного датчика 3 соединен с измерителем, выполненным в виде диска 4, в котором имеется одно отверстие 5. Оптический датчик пути 6 жестко соединен с осью этого диска. Датчик угла поворота 8 установлен на корпусе накладного кругломера. Наконечник датчика угла поворота жестко соединен со штангой 7, соединенной с корпусом накладного кругломера и с основанием 9. Основание неподвижно соединено с поперечным суппортом станка 11. Вне корпуса расположены датчик количества оборотов измеряемого объекта 15 и блок хранения обработки и мониторинга информации 16, соединенный со всеми датчиками. Способ состоит в следующем. Перед началом измерения наносят метку на поверхность измеряемого тела. Поперечным суппортом станка обеспечивают контакт роликов с измеряемой поверхностью. В процессе вращения измеряемого тела по сигналу с датчика пути снимают показания всех датчиков, пока тело не совершит минимум один оборот. Поперечным суппортом перемещают прибор так, чтобы обеспечить одинаковое положение прибора в радиальном направлении во всех сечениях. Количество оборотов в каждом сечении определяют по количеству сигналов с датчика количества оборотов. После измерения всего тела полученные данные обрабатываются на ЭВМ. Технический результат - повышение универсальности способа и устройства, возможность определения поведения тела в процессе эксплуатации 2 c.п. ф-лы, 2 ил.
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ НОМИНАЛЬНО КРУГЛОЙ ЦИЛИНДРИЧЕСКОЙ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2158895C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОФИЛЕЙ СЕЧЕНИЙ ФАСОННЫХ ДЕТАЛЕЙ | 1990 |
|
RU2016371C1 |
| НАКЛАДНОЙ КРУГЛОМЕР | 1998 |
|
RU2134404C1 |
| US 5337485 А, 16.08.1994. | |||

