Известны способы управления движением сосудов подвесных канатных дорог (ПКД) с позиционным считыванием импульсов с носителя информации, располагаемого вдоль трассы дороги. Эти способы не обеспечивают достаточной точности и надежности управления.
Предложено импульсы меток, нанесенных на несущий стальной канат на равных расстояниях друг от друга, во время движения сосудов регистрировать считывающим устройством, жестко связанным с фиксированным сосудом, иреобразовывать в электричепкие импульсы, число которых за каждый отрезок времени пропорционально расстоянию сосуда от приводной станци.и, модулировать указанными электрическими импульсами высокую несущую частоту, передавать модулированные высокочастотные колебания по линии поверхностной волны, образованной указанным несущим канатом с диэлектрическим покрытием, на приводную станцию, преобразовывать в импульсы низкой частоты и подавать на вход индикатора положения сосудов и системы управления.
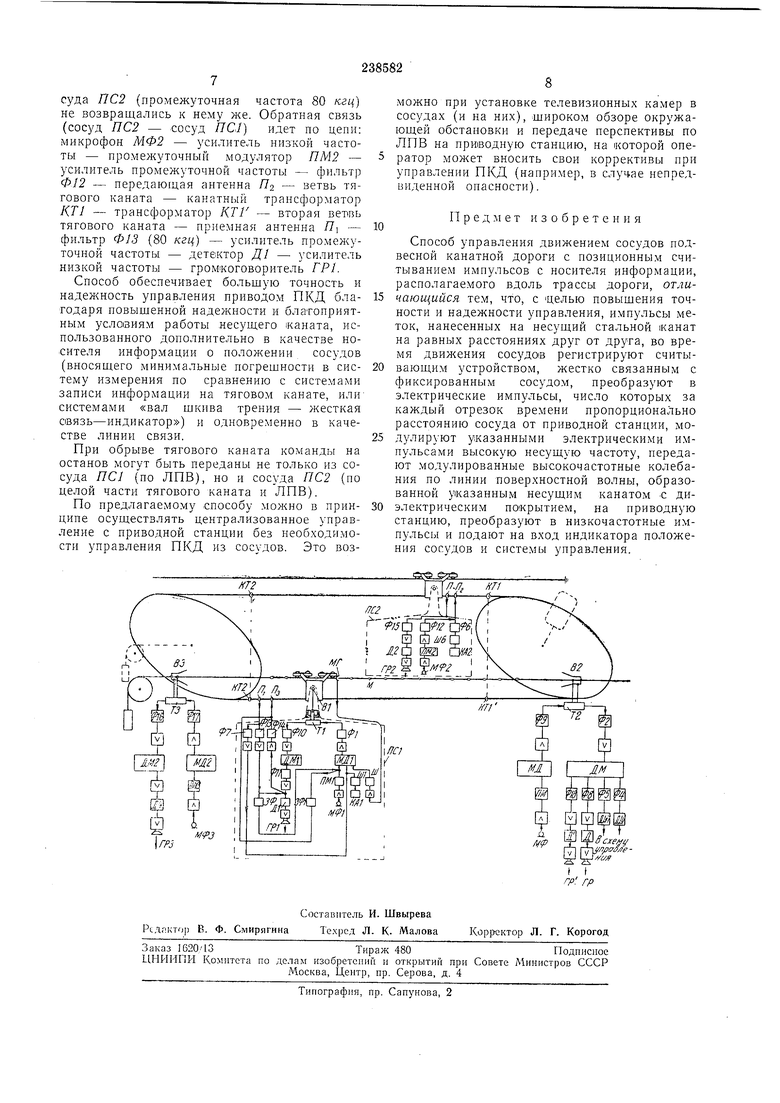
На чертеже представлена блок-схема устройства, поясняющего предлагаемый способ.
(ЛПВ), известную также как однопроводная линия, линия Губо или линия Хармса-Губо и применяемую в технике для передачи теле1ВИЗИОННЫХ программ.
Несущий канат выполнен в виде наиравляющего волновода, вдоль которого распространяются электромагнитные волны. Последние попеременно переходят из диэлектрического покрытия в воздушное пространство и обратно и образуют поверхностную волну. Практически вся энергия распространяется внутри воображаемого цилиндра, радиус которого о называется граничным (при соответствующем еыборе параметров можно обеспечить
г„ 0,75 м). В качестве материала для покрытия волновода при реализации описываемого способа применяют, например, политетрафторэтилен (фторопласт-4), имеющий большую механическую прочность и следующие
основные параметры (в диапазоне частот 150-500 Мгц): тангенс угла диэлектрических иотерь tg6 10i, относительная диэлектрическая проницаемость е 2,0.
В силу термостабильности физико-химического строения фторопла1Ста-4 величины tgfi и е остаются неизменными в широком диапазоне температур. Кроме того, изоляция из фторопласта-4 не горит и не смачивается воУстройство, рассматриваемое в качестве примера, реализует предлагаемый способ с использованием матнитной записи информации на канате (аналогично может быть применена и радиоактивная запись).
По всей длине ЛПВ (от ириводной до конечной станции) на волнсвод (непосредственно стальной несущий канат) наносятся магнитные метки известным способом (в данном случае целесообразнее всего с помощью установки для магнитной записи, расположенной во время нанесения меток на подвесном сосуде, перемещающемся относительно несущего каната).
При движении по трассе подвесного сосуда ПС1 расположенная на его ходовой тележке магнитная головка Л1Г любой известной конструкции считывает импульсы магнитных меток М, которые преобразуются в электрические импульсы, усиливаются, преобразуются в шифраторе Ш (кодирующем устройстве) в импульсы с частотой заполнения 60 к.гц, «оторые подаются s модулятор МД1, модулируют частоту 220 Мгц. Эти модулированные колебания с несущей 220 Мгц усиливаются и, пройдя через фильтр высокой частоты Ф1 и тройник Т1, в общем случае с иомощью возбудителя В1 (в качестве icoTOporo служит подвеска сосуда) передаются по ЛПВ на приводную станцию. С помощью установленного здесь возбудителя В2 через тройник Т2, фильтр высокой частоты Ф2 и усилитель сигналы попадают на демодулятор ДМ. Из этого демодулятора импульсы с частотой заполнения 60 кгц через фильтр Ф4 иодаются на дсщифратор ДШ (декодирующее устройство), вь деляюи.1,ий импульсы низ;кой частоты (соответствуюпдие импульсам магнитных меток), подаются на вход индикатора положения сосудов и системы управления.
С помощью такой передачи инфор.мацин осуществляется управление приводом ПКД в функции пути или регулирование скорости иривода с заданием ее в функции пути.
Таким образом, осуществляется автоматическое управление движением сосудов ПКД без оператора или централизованное автоматическое управление (с подачей первоначального импульса) с участием оператора на приводной станции.
В современных системах управления пассажирскими маятниковыми ПКД предусматривается и телеуиравление из обоих сосудов (вагонов, кабин).
При централизованном управлении скорость движения ПКД может быть изменена командами из сосудов, причем в первую очередь выполняется команда «медленнее. Сосуды могут быть остановлены в любом пункте трассы как плавным снижением скорости, так и ио командам «останов или «аварийный останов. При телеуправлении (ТУ) из сосуда ПС1 прп воздействии на командоаппарат /(Л/ на щифратор Ш1 подаются управляющие имиульсы, которые в виде кодированных команд (частота заполнения импульсов 40 кгц поступают в модулятор МД1, модулируют частоту 220 Мгц. Модулированные колебания с несущей 220 Мгц усиливаются и через фильтр
Ф,1 и тройник Т с помощью возбудителя В1 передаются по ЛПВ на нриводную станцию. С помощью возбудителя В2 через фильтр Ф2 и усилитель высокочастотные сигналы попадают в демодулятор ДМ, из которого импульсы с частотой заполнения 40 кгц через фпльтр Ф5 подаются на дещифратор ДШ1. Этот дешифратор выделяет импульсы низкой частоты (соответствующие и.мпульсам от командоаппарата KAl), подаваемые на вход
системы управления.
При ТУ из сосуда ПС2 при воздействии на командоаппарат КА2 на шифратор Ш2 подаются управляющие импульсы, которые в виде кодированных команд (с частотой заиолнения импульсов 40 кгц} через фильтр Ф6 поступают на передающую антенну П2 (выполненную в виде канатного трансформатора), охватывающую тяговый 1канат и закрепленную на подвеске сосуда. Далее импульсы
передаются по тяговому канату, снимаются канатным трансформатором KTJ, размещенным до щкива трения приводной станции (чтобы не требовалось изоляции щкива от земли или от тягового каната) и через канатный трансформатор КТ1 иодаются во вторую ветвь тягового каната, принимаются приемной антенной Я; (также выполненной в виде канатного трансформатора), поступают на фильтр Ф7, усиливаются и подаются на модулятор МД1, модулируют частоту 220 Мгц. Л одулированные колебания с несущей 220 Мгц усиливаются, и пройдя через фильтр и тройник Г/, с помощью того же возбудителя В1 передаются по ЛПВ на приводную станцию. Здесь с иомощью того же возбудителя В2 через тройник Т2, фильтр Ф2 и усилитель высокочастотные сигналы попадают в демодулятор ДА4. Из последнего импульсы с частотой заиолиения 40 кгц через
фильтр Ф5 подаются в дешифратор ДШ, выделяющий имиульсы низкой частоты (соответствующие импульсам от командоаппарата .А2), подавае.мые на вход системы управления. Для команд, подаваемых из сосуда ПС2,
возможен еще один путь (что повышает надежность системы передачи команд): тяговый канат-канатный трансформатор КТ2 у шки1ва трения конечной станции-трансформатор К.Т2 - другая ветвь тягового каната-
прие.мная антенна П я далее аналогично (ЛПВ - приводная станция - система управления).
Предлагаемый способ освобождает от необходимости нзолировать тяговый канат от
шкпвов трения на станциях. Изоляция же тягового каната от промежуточных опор на современных ПКД осуществляется с помощью резиновых бандажей на иоддерживающих роликах или изолированием траверсы роликоНа современных пассажирских ПКД предусматривается двусторонняя телефонная связь: а) между приводной станцией и обоими сосудами; б) между приводной и конечной станциями; в) между обоими сосудами.
Телефонная связь (ТС) между сосудом ПС1 и приводной станцией (из сосуда) осуществляется по следующей цепи: микрофон МФ1 - усилитель низкой частоты - промежуточный модулятор ПМ.1 (промежуточная частота 100 кгц - модулятор МД1 - усилитель ВЫС01КОЙ частоты - фильтр Ф1 - тройник Т1 - возбудитель В1 - ЛПВ - возбудитель В2 - тройник Т2 - фильтр Ф2 - усилитель вьгсокой частоты - демодулятор ДМ - фильтр промежуточной частоты Ф8 (100 кгц) - усилитель промежуточной частоты - детектор Д - усилитель низкой частоты - громкоговоритель ГР.
ТС (приводная станция - подвесной сосуд ПС1) осуществляется по цепи: микрофон МФ - усилитель низкой частоты промежуточный модулятор ЯМ (промежуточная частота 100 кгц - модулятор МД - усилитель высокой частоты - фильтр Ф9 (150 Мгц - тройник Т2 - возбудитель В2 - ЛПВ - возбудитель В1 - тройник Т1 - фильтр Ф10 (150 Мгц - усилитель высокой частоты - демодулятор Д,М1 - фильтр ФП - усилитель промежуточной частоты - детектор Д/ - усилитель низкой частоты - громкоговоритель ГР1.
ТС , (подвесной сосуд ПС2 - нриводная станция) осуществляется но цепи: микрофон МФ2 - усилитель низкой частоты - промежуточный моду тятор ПМ2 - усилитель промежуточной частоты-фильтр Ф12 (80кгц) - передающая антенна П сосуда ПС2 - ветвь тягового каната-канатный трансформатор КТ1 - трансформатор /СГ/ - вторая ветвь тягового каната - приемная антенна П сосуда ПС1 - фильтр Ф.13 (80 кгц) - усилитель промежуточной частоты - заградительный (развязывающий) фильтр ЗФ (ййкгц - модулятор уИДУ (220 Мгц - усилитель высокой частоты-фильтр Ф1, (220 Мгц -тройник Т1 - возбудитель В1 - ЛПВ - возбудитель В2 - тройник Т2 - фильтр Ф2 (220 Мгц - усилитель высокой частоты - демодулятор ДМ - фильтр Ф18 (80 кгц - усилитель промежуточной частоты - детектор Д - усилитель низкой частоты - громкоговоритель ГР.
Для прослушивания в сосуде ПС1 передачи телефонных сообщений из ПС2 на приводную станцию от упомянутой выше цепи сделано ответвление в точке между усилителем и заградительным фильтром ЗФ (100 кгц к точке между усилителем и детектором ДЛ с которого телефонные сообщения поступают на усилитель низкой частоты и далее - на громкоговоритель ГР1. Заградительный (развязывающий) фильтр ЗФ установлен для того, чтобы телефонные сообщения с приводной
станции (промежуточная частота 100 кгц не возвращались на нее же.
ТС (приводная станция - сосуд ПС2 осуществляется по цепи: микрофон МФ - усилитель низкой частоты - промежуточный модулятор ПМ - модулятор Л1Д - усилитель высокой частоты - фильтр Ф9 - тройник Т2 - возбудитель В2 - ЛПВ - возбудитель В1 - тройник Т1 - фильтр Ф10 -
усилитель высокой частоты - демодулятор ДМ/ - фильтр Ф11 (100 кгц - усилитель промел уточной частоты, еторой усилитель - Ф14 (ГОО кгц - передающая антенна Яз сосуда ПС1 - ветвь тягового -каната - каватный трансформатор КТ1 - трансформатор КТ1 - приемная антенна Я сосуда ПС2 - фильтр Ф15 (100 кгц - усилитель промежуточной частоты - детектор Д2 - усилитель низкой частоты - громкоговоритель ГР2.
ТС с приводной станции на сосуд ПС2 прослущивается по цепи: детектор Д/ - усилитель низкой частоты - громкоговоритель ГР1.
ТС (пр 1водная станция - конечная станция) осуществляется по цепп: микрофон МФ - усилитель низкой частоты - промежуточный модулятор ЯЛ1-модулятор МД- усилитель высокой частоты - фильтр Ф9 -
тройник Т2 - возбудитель В2 - ЛПВ - возбудитель 33 (на конечной станции) - тройник ТЗ - фильтр Ф16 (150 Мгц - усилитель высокой частоты - демодулятор ДМ2 (150 Мгц - усилитель промежуточной частоты - детектор Д4 - усилитель низкой частоты - громкоговоритель ГРЗ.
Обратная ТС (конечная станция - приводная станция) осуществляется по цепи: микрофон МФЗ - усилитель низкой частоты - промежуточный модулятор ЯМЗ (промежуточная частота 80 кгц - модулятор МД2 (220 Мгц - усилитель высокой частоты - фильтр Ф17 (220 Мгц - тройник ТЗ-возбудитель ВЗ - ЛПВ - возбудитель В2-
тройник Т2 - фильтр Ф2 (220 Л1е({) - усилитель высокой частоты - демодулятор фильтр Ф18 (80 кгц - усилитель промелсуточной частоты - детектор Д - усилитель низкой частоты - громкоговоритель ГР (в
случае необходимости может быть выделен самостоятельный канал для тракта конечная станция - приводная станция).
ТС (сосуд ЯС/ - сосуд ПС2} осуществляется по цепп: микрофон МФ1 - усилитель
низкой частоты - промежуточный модулятор ПМ1 - заградительный фильтр ЗФ/ (80 кгц - иередающая антенна Яз - ветвь тягового каната - канатный трансформатор К.ТГ - трансформатор К.Т1 - другая ветвь
тягового каната - ириемная антенна - фильтр Ф/5 (100 кгц - усилитель промежуточной частоты - детектор Д2 - усилитель низкой частоты - громкоговоритель ГР2. Заградительный фильтр ЗФ/ установлен
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОСУДОВ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 1970 |
|
SU277821A1 |
| ДВУХКАНАТНАЯ ПОДВЕСНАЯ ДОРОГА | 1973 |
|
SU364486A1 |
| МАЛОКАНАЛЬНАЯ РАДИОРЕЛЕЙНАЯ СТАНЦИЯ | 2016 |
|
RU2632802C1 |
| Устройство и способ доставки грузов | 2019 |
|
RU2735796C1 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛОВ ДИСТАНЦИОННОГО | 1966 |
|
SU185373A1 |
| УСТРОЙСТВО ШИРОКОПОЛОСНОЙ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ ПО ЭЛЕКТРОСЕТЯМ | 2001 |
|
RU2216853C2 |
| Устройство сопряжения сигналов релейной защиты, проходящих по разным средам передачи при организации гибридного канала связи на кабельно-воздушных линиях 35 кВ и выше | 2024 |
|
RU2838520C1 |
| СПОСОБЫ И УСТРОЙСТВА ПОВЫШЕНИЯ ИНДЕКСА УГЛОВОЙ МОДУЛЯЦИИ | 2012 |
|
RU2493646C2 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1995 |
|
RU2090003C1 |
| ИМИТАТОР ПОМЕХОВЫХ РАДИОСИГНАЛОВ | 2017 |
|
RU2671244C1 |
