Известно устройство для налива нефтепродуктов в цистерны, включающее шарнирные трубопроводы, связанные с герметизирующей крышкой, имеющей емкостный датчик, посредством подвижной тележки, приводимой в движение блоком привода с тросовой системой. Та1кие устройства частично автоматизируют процесс налива нефтепродуктов в цистерны.
Отличительная особенность предлагаемого устройства для налива нефтепродуктов в цистерны состоит в том, что оно снабжено механизмом ориентации датчика уровня, что позволяет полностью автоматизировать процесс налива нефтепродуктов в цистерны.
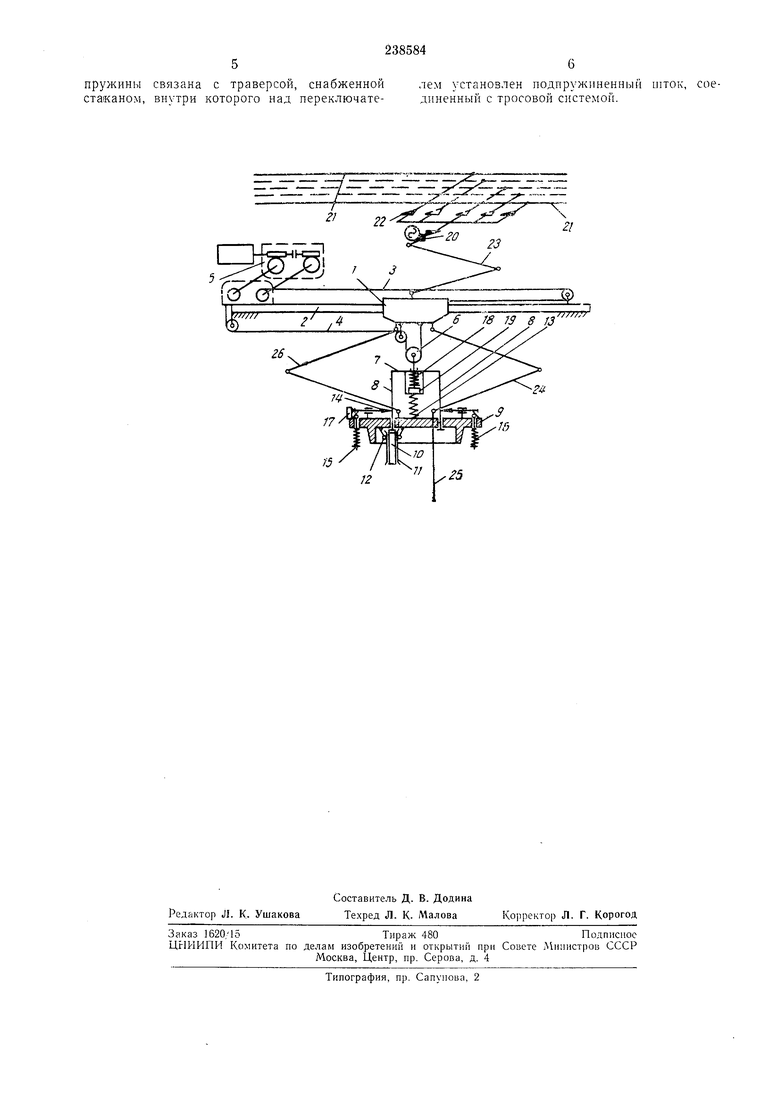
На чертеже изображено предлагаемое устройство.
Устройство содержит подвижную тележку 1, которая перемещается по рельсам 2 с помощью тросовой передачи, состоящей из двух ветвей: ветви 3 передвижения и ветви 4 спуско-подъемных операций. Передвижение тележки осуществляется от блока 5 привода.
На ветви 4 с помощью подвижного блока 6 подвещивается траверса 7 с прикрепленными к ней вертикальными щтангами 8, на заплечиках которых свободно подвещивается герметизирующая крыщка 9. На одной из щтанг 8 в ее нижней части крепится емкостный датчик 10 уровня налива, снабженный
двумя подпружиненными рычагами //, которые в исходном верхнем положении с помощью роликов 2, закрепленных на крышке 9, плотно прилегают к телу датчика 10.
Траверса 7 соединена с герметиз1фующей крышкой 9 при помощи грузовой пружины 13, которая в верхнем положении растянута и стремится притянуть траверсу к 9, чему препятствуют два горизонтальных фиксатора 14, входящих одним концом в проточки вертикальных штанг 8, другим концом подвижно соединены с вертикальными щупами 15, снабженными пружинами сжатия 16. Вертикальные щупы 15, служащие для различения конструктпсного исиолнен я колпака цистерн, имеют возможность свободно двигаться относительно герметизирующей крышки 9, выводя при этом фиксаторы из проточек штанг 8 и позволяя им перемещаться вниз относительно герметизирующей крышки 9 под действием усилия грузовой пружины 13.
Один из горизонтальных фиксаторов при своем движении включает электрический переключатель 17, который переключает рабочие точки емкостного датчика 10 уровня налива в зависимости от конструктивного исполнения колпака цистерны. Обойма подвижного блока 6 имеет возможность иод действием пружины сжатия 18, при ослаблении ветви 4 спуско-подъемных операций, перемещаться вниз относительно траверсы 7 и воздействовать на электрический выключатель 19, служащий для подачи сигнала на остановку двигателя блока 5 привода и открытие запорной арматуры 20. Жидкость наливается в цистерны, проходя из коллекторов 21 эстакады через клапаны 22 одностороннего действия, далее через электроприводной запорный орган арматуры 20, горизонтальный щарнирный трубопровод 23, правый шарнирный трубопровод 24 и наливную трубу 25. Левый вертикальный шарнирный трубопровод 26 служит для отвода газопаро-воздущной смеси из-под герметизирующей крышки 9 на эстакаду. Наливное устройство работает следующим образом. В случае заправки цистерны с малым объемом колпака вертикальные щупы 15 остаются в исходном состоянии, и, следовательно, горизонтальные фи1ксаторы 14 также не выходят из проточек на штангах S и не позволяют им перемещаться вниз относительно герметизирующей крышки. Поэтому датчик 10 налива оказывается ориентированным относительно этой 1крышки. С момента иосадки герметизирующей крыщки на люк цистерны начинает ослабевать натяжение ветви 4 спуско-подъемных операций, в результате чего под действием пружины сжатия 18 обойма подвижного блока 6 начинает перемещаться вниз по отношению к траверсе 7 и своим нилшим торцом включает электрический выключатель 19, который подает сигнал на остановку двигателя блока 5 привода и открытие запорной арматуры 20. Начинается процесс налива цистерны. В случае налива цистерн с большим объемом колпака операция заправки протекает в следующем порядке. До посадки герметизирующей крышки 9 на люк цистерны вертикальные щупы 15 упираются IB крышку колпака цистерны и начинают перемещаться вверх по отнощению к герметизирующей крыщке, преодолевая сопротивление прулсин сжатия 16, и выводят горизонтальные фиксаторы 14 из проточек на штангах 8, чем обеспечивают их возможность перемещаться относительно герметизирующей крыщки. До люмента посадки герметизирующей крышки на люк цистерны движение щтанг 8 относительно крыщки 9 не происходит, поскольку вес самой крыш.ки и элементов установки, смонтированных на ней, значительно превышает усилие грузовой пружины 13, вызывающей это движение. С момента посадки крышки 9 на люк ее 1вес передается уже не на щтанги, а на люк, поэтому иод действием усилия грузовой пружины 13 начинается перемещение вниз траверсы 7 со штангами 8, а следовательно, перемещается вниз и датчик 10 налива, закрепленный в нижней части щтанги. При этом подпружиненные рычаги // выходят из контакта с упорными роликами 12 и под действием пружин расходятся на заданный угол относительно оси датчика 10, причем упорные башмаки, закрепленные в нижней части рычагов 11, принимают горизонтальное положение. При дальнейшем движении щтанг 8 вместе с датчиком 10 рычаги 11 упираются в верхнюю образующую котла цистерны и прекращают дальнейшее движение датчика. Погрешность работы датчика 10 уровня налива, применяемого в установке, не превышает по уровню налива ± 0,5 см, что достаточно для автоматизированного учета количества налитой в цистерну жидкости. С момента установки датчика 10 дальнейшие операции заправки идут в том же порядке, как и при заправке цистерн с малым объемом колпака. Жидкость при наливе из коллектора 2/ через клапаны 22 одностороннего действия, запорную арматуру 20, по шарнирным трубопроводам 23 и 24 подводится к наливной трубе,25. Газо-паро-воздущная смесь из цистерны ПО щарнирному трубопроводу 26 отводится на эстакаду. Налив цистерны ведется до тех пор, пока уровень жидкости в ней не достигнет нижней предварительной сигнальной точки датчика 10. В этот момент датчик выдает электрический сигнал на прикрытие проходного сечения запорной арматуры 20 на 85-90%, и производительность налива уменьшается в 4,5- 5 раз, что необходимо для точного ограничения налива на верхней ограничительной точке датчика 10. По достижении ограничительного уровня датчик выдает сигнал на окончательное закрытие арматуры 20. После закрытия арматуры автоматически подается сигнал на подъем средств налива в исходное состояние. При этом включается двигатель блока привода, который поднимает подвижный |блок 6 и траверсу 7 со штангами 8. В процессе подъема датчика 10 его подпружиненные рычаги 11, упираясь в ролики 12, плотно прижимаются к телу датчика 10. С момента упора заплечиков щтанг в нижнюю часть крыщки 9 начинается подъем всех средств налива в исходное положение. Предмет изобретения Устройство для налива нефтепродуктов в цистерны, содержащее шарнирные трубопроводы, связанные с герметизирующей крыщкой, имеющей емкостный датчик, посредством подвижной тележки, приводимой в движение блоком привода с тросовой системой, отличающееся тем, что, с целью автоматизации процесса заполнения емкости жидкостью, герметизирующая крышка снабжена механизмом ориентации датчика, выполненным в виде штанг, скрепленных траверсой, на конце одной из которых установлен емкостный датпружиныстаканом, 56 связана с траверсой, снабженной лем установлен подпружиненный UITOK, соевнутри которого над переключате-дпненнын с тросовой системой. 238584 
„..
21
23
