Предложение относится к области автоматизации строительных и дорожных работ.
Известны способы регулирования настройки .вибра1ц.ионных машин с применен ием специального оптимизатора, который имеет большое время настройки и невысокую точность поддержания оптимального рабочего режима.
Предложенный способ отличается от известных тем, что формируют импульсные сигналы в момент удара молота и в момент прохождения дисбалансом оптимального положения и изменяют скорость вращения дисбалансов или жесткость пружины, или величину начального зазора между ударной частью и ограничителем, обеспечивая совпадение обоих импульсов. Это упрощает процесс непрерывного поддержания оптимального режима настройки при повышении ее точности и сокращении времени переходных процессов при выходе машины «а оптимальный режим.
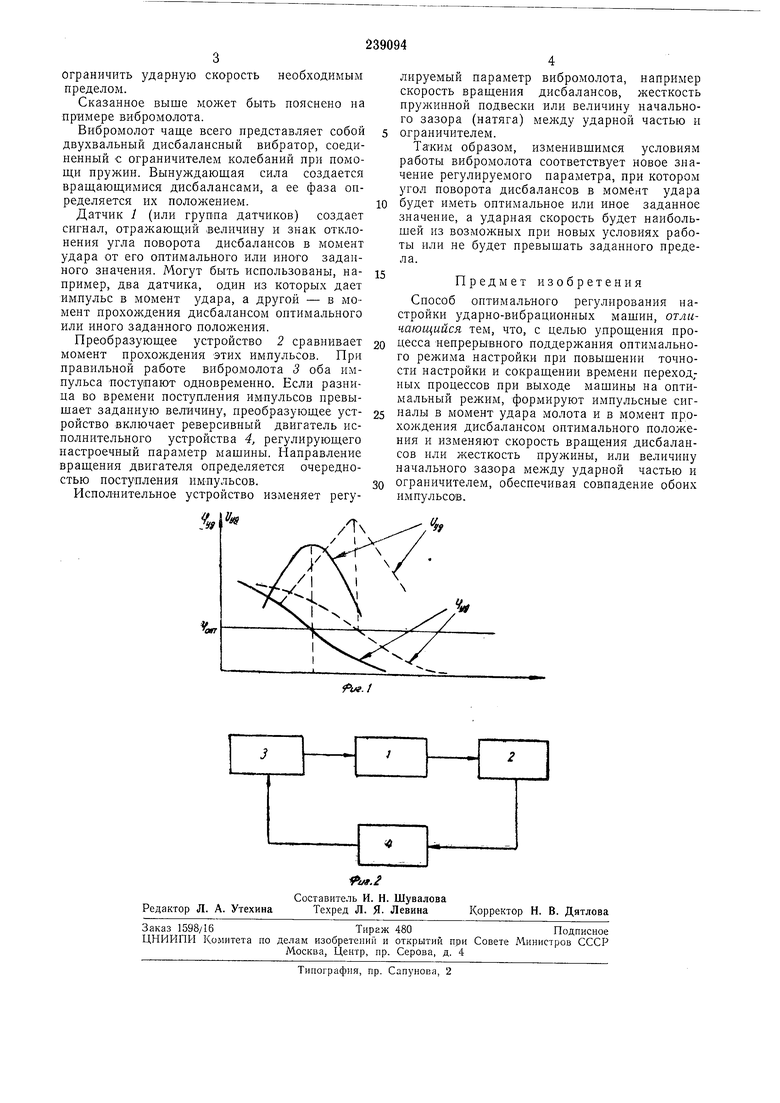
На фиг. 1 показаны графики кривых, поясняющие принцип, положенный в основу способа самонастройки, на фиг. 2 - структурная схема системы автоматического регулирования вибромолота.
Кривые размаха колебаний и ударной скорости рабочего органа ударно-вибрационной машины, представленные в виде функции параметра настройки, имеют характерные резонасные пики. Целесообразно работать в точке резонанса ударной скорости.
Кроме скорости удар характеризуется фазой вынуждающей силы в момент удара. Отношение этих величин в окрестности максимальной ударной скорости приводится на графике фиг. 1.
В том месте, где ударная скорость Ууд как функция -параметра настройки имеет максимум, фаза вынул дающей силы фуд имеет определенное значение на монотонной ветви кривой. В то время как от изменения условий работы системы величина максимума ударной скорости И его положение на оси параметра
настройки могут изменяться, значение фазы дисбалансов, соответствующее максимуму ударной скорости, остается постоянным. Эта особенность ударно-колебательных систем полол ;ена в основу предлагаемого способаЕсли вслед за изменяющимися условиями работы машины система автоматического регулирования будет так изменять параметр настройки, чтобы фаза вынуждающей силы в момент удара сохраняла постоянное оптимальное значение, то ударно-вибрационная мащина будет автоматически поддерживаться в точке максиму1ма ударной скорости, куда бы эта точка ни перемещалась вдоль оси параметра настройки. Выбором надлел ащей фазы ограничить ударную скорость необходимым пределом. Сказанное выше может быть пояснено на примере вибромолота. Вибромолот чаще всего представляет собой двухзальный дисбалансный вибратор, соединенный с ограничителем колебаний при помощи пружин. Вынуждающая сила создается вращающимися дисбалансами, а ее фаза определяется их положением. Датчик 1 (или группа датчиков) создает сигнал, отражающий величину и знак отклонения угла поворота дисбалансов в момент удара от его оптимального или иного заданного значения. Могут быть использованы, например, два датчика, один из которых дает импульс в момент удара, а другой - в момент прохождения дисбалансом оптимального или иного заданного положения. Преобразующее устройство 2 сравнивает момент прохождения этих импульсов. При правильной работе вибромолота 3 оба импульса поступают одновременно. Если разница во времени поступления импульсов превышает заданную величину, преобразующее устройство включает реверсивный двигатель исполнительного устройства 4, регулирующего настроечный параметр машршы. Направление вращения двигателя определяется очередностью поступления им-пульсов. Исполнительное устройство изменяет регулируемый параметр вибромолота, например скорость вращения дисбалансов, жесткость пружинной подвески или величину начального зазора (натяга) меледу ударной частью и ограничителем. Таким образом, изменившимся условиям работы вибромолота соответствует новое значение регулируемого параметра, при котором угол поворота дисбалансов в момент удара будет иметь оптимальное или иное заданное значение, а ударная скорость будет наибольшей из возможных при новых условиях работы или не будет превышать заданного предела. Предмет изобретения Способ оптимального регулирования настройки ударно-вибрационных машин, отличающийся тем, что, с целью упрощения процесса непрерывного поддержания оптимального режима настройки при повышении точности настройки и сокращении времени переход; ных процессов при выходе машины на оптимальный режи.м, формируют импульсные сигпалы в момент удара молота и в момент прохождения дисбалансом оптимального положения и изменяют скорость вращения дисбалансов или жесткость пружины, или величину начального зазора между ударной частью и ограничителем, обеспечивая совпадение обоих импульсов.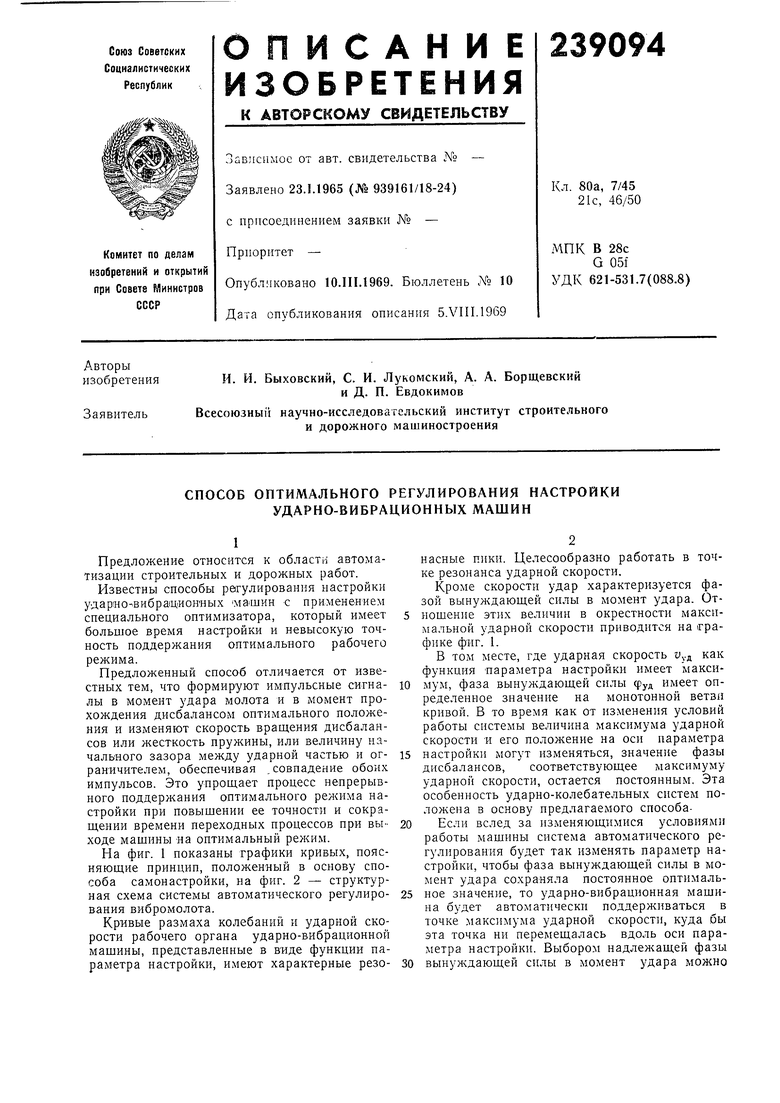
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления работой машин ударно-вибрационного действия | 1980 |
|
SU1013572A1 |
| Устройство для погружения трубопроводов при их бестраншейной прокладке | 1975 |
|
SU557153A1 |
| Виброударная машина | 1989 |
|
SU1708435A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ МАШИН ВИБРОУДАРНОГО ДЕЙСТВИЯ | 1972 |
|
SU348362A1 |
| Устройство для погружения свай | 1988 |
|
SU1599480A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1966 |
|
SU189475A1 |
| ДВУХМАССНЫЙ ВИБРОУДАРНЫЙ ГРОХОТ | 2010 |
|
RU2424067C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ И РЕГУЛИРОВАНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2335354C2 |
| Способ настройки на резонансные колебания вибромашины с кусочно-линейной характеристикой упругих связей | 1985 |
|
SU1351696A1 |
| СПОСОБ УПРАВЛЕНИЯ БОЙКОМ ЭЛЕКТРОМАГНИТНОЙ МАШИНЫ УДАРНОГО ДЕЙСТВИЯ | 1999 |
|
RU2221688C2 |
