По основному авт. св. № 251433 известно устройство для автоматического регулирования режима работы машин виброударного действия.
Цель изобретения - обеспечить требуемую точность поддержания регулируемой величины.
Достигается это тем, что разрезное кольцо распределителя ИМпульсов выполнено с четырьмя секторами, два из которых, смежные и малые, имеют длину, не превосходящую величину допустимого отклонения регулируемой величины от заданного значения, и соединены с началам1И обмоток поляризованного реле, осуществляющего релейное подключение регулирующего воздействия, два других больщих сектора соединены с началами обмоток другого поляризованного реле, обеспечивающего лри необходимости осуществление плавного изменения регулирующего воздействия, причем каждый -малый сектор соединен с больщ.им через диод, а между общими точками реле и сплощным контактным кольцом распределителя импульсов включен датчик момента удара.
В процессе работы таких мащин виброударного действия как вибротрамбовки и вибромолоты для разработки мерзлых грунтов происходит скоротечное изменение внещних возмущений в связи с быстрым изменением физико-механических свойств грунта при воздействии на него рабочих органов этих мащин.
При уплотнении грунта способом паверхностного вибротрамбования наиболее быстрое изменение возмущений -наблюдается в начальный период уплотнения. Получить закон изменения возмущений (грунтовых условий) сложно, одна-ко была установлена закономерность, что одному и тому же значению фазового угла удара а (угловому положению эксцентриситета эксцентрикового вала или дебаланса в момент рабочего органа мащины) соответствуют (при прочих равных условиях)
ббльщие значения скорости вращения эксцентрикового вала Си -при работе iia рыхлом грунте, чем при работе на том же, но более плотном грунте. Для поддержания постоянного значения
. Const в процессе работы мащин рассматриваемого типа необходимо регулировать скорость вращения эксцентрикового вала в диапазоне значений от Шщах, соответствующей работе в оптимальном режиме на
наиболее рыхлом грунте, до Шшт. соответствующей работе в режиме с наибольщнм ожидаемым коэффициентом восстановления скорости R. Максимальное быстродействие устройства
кЗчества регулирования при быстрых изменениях возмущений может быть достигнуто лишь при Комбинированном управлении: с использованием одновременно плавного и релейного изменения регулирующего воздействия.
Изобретение поясняется чертежом.
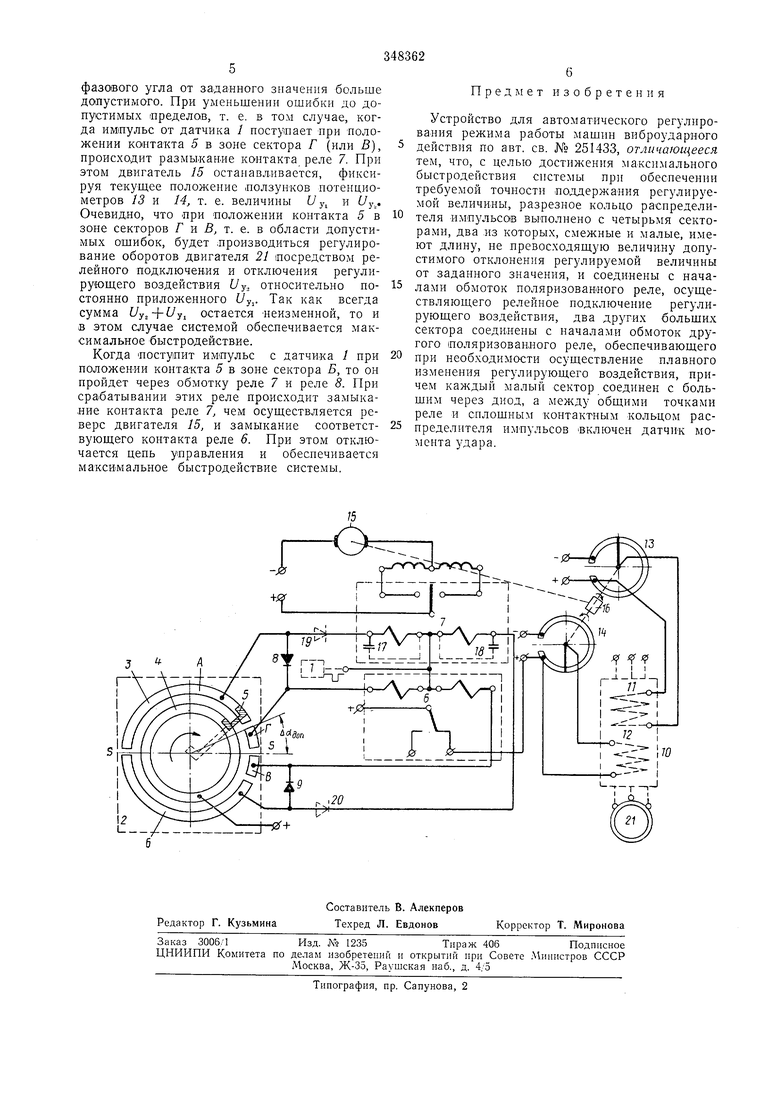
Система автоматического регулирования фазового угла удара содержит датчик 1 момента удара, распределитель импульсов 2, являющийся одновременно датчиком положения кривошипа и частью логического устройства и логических элементов, управляющих системой питания силового двигателя.
В схеме в качестве логических элементов приняты поляризованные трехиозиционное и двухпозиционное реле. В .принципе могут быть использованы любые другие устройства, позволяющие осуществлять требуемую функцию логики.
Разрезное кольцо 3 распределителя импульсов состоит из четырех изолированных секторов А, В, В и Г, причем длины секторов В -я Г назначаются по расчету из условия обеспечения отклонений фактических фазовых углов а удара от задаваемого аопт. .-юд. в допустимых пределах Ассдоп. Распределитель импульсов устаиавливается на машине виброударного действия таким образом, чтобы осевая линия 5-5, проходящая через середину промежутка между секторами В и Г, находилась в требуемом угловом положении относительно линии, проходящей через точки положения оси кривошипа (дебаланса) в крайнем верхнем и нижнем положениях, т. е. в положении требуемого аопт. доп- В устройстве предусмотрено также сплошное кольцо 4 распределителя импульсов.
Положение кривошипа в любой момент времени характеризует положение вращающегося вместе с ним скользящего контакта 5, связывающего сплощное кольцо 4 распределителя импульсов с соответствующими секторами разрезного кольца 3. С секторами Г и В соединены концы последовательно соединенных обмоток двухпозиционпого поляризованното реле 6. К секторам А и Б аналогичным образом подключены последовательно соединенные обмотки трехпозиционного поляризованного реле 7.
Датчик 1 момента удара выдает импульс в момент удара рабочего органа машины об ограничитель сектора А тл Г. Секторы Б и В соединены между собой соответственно диодами 8 и Я что позволяет пропускать сигнал с датчика момента удара только в направлении «сектор Л - сектор Г или «сектор Б - сектор В.
Система работает следующим образом.
Когда в момент удара рабочего органа кривощип находится в зоне сектора А (при сс :аопт., причем ошибка Аа аопт.-а Аадоп.), контакт 5 соединяет сектор А со сплошным кольцом 4. При этом поступивший с датчика 1 момента удара импульс проходит
через обмотку реле 7 и по цепи «сплошное кольцо 4 - вращающийся контакт 5 - сектор Л - точка С - диод 8 - точка ос - обмотку реле 6. При этом оба реле срабатывают. Их средние контакты замкнут соответствующие пеподвижные контакты, обеспечивая включение устройства для плавного изменения регулирующего воздействия в сторону увеличения оборотов приводного двигателя
(интегрирующего звеиа) и одновременно с этим включение устройства для релейного (скачкообразного) включения составляющей регулирующего воздействия, которая в сумме с плавно изменяющейся составляющей обеспечивает включение двигателя на полную мощность. Как известно, сиособы непосредственного изменения скорости вращения силовых двигателей могут быть различными. На чертеже в качестве примера рассмотрен
возможный вариант регулирования скорости вращения асинхронного электродвигателя с помощью дросселя насыщения 10 с двумя обмотками подмагничивапия // и 12.
Изменение величины плавно изменяющейся
составляющей регулирующего воздействия бу, и величины релейно-включаемой составляющей {Уу осуществляется изменением величины сопротивления включенных в цепи питания обмоток управления 11 и 12 соответственно переменных резисторов 13 и 14.
Это достигается перемещением в противополон ные стороны их ползунков с помощью исполнительного двигателя 15.
При срабатывании реле 5 и 7 при положеНИИ контакта 5 в зоне сектора Л происходит следующее: подвижный контакт трехпозициониого реле 7 осуществляет коммутацию реверсивного двигателя 15 для вращения через редуктор 16 ползунка потенциометра 13, на
уменьшение активного сопротивлеиия в цепи обмотки управления 11 и вращения ползунка потенциометра на увеличение активного сопротивления в цепи обмотки управления 12. При этом увеличивается t/y, и уменьшается
величина Uy,, . Однако их сумма остается неизменной. Ввиду дискретного поступления сигнала с датчика момента удара (один импульс за ударный цикл) для удержания подвижного контакта реле 7 до следующего сигнала с датчика 1 в замкнутом положепии предусматривается временная задержка при отпускании реле за счет включения параллельно обмотке реле 7 емкости 17 и емкости 18 и включением диода 19 (20).
На схеме эти конденсаторы и диоды показаиы пунктиром.
Подмагничивание дросселя насыщения 10 достигает максимума за счет одновременного приложения к его обмоткам соответственно напряжений t/y, и Uy,, обеспечивая включение двигателя 21 па полиую мощность.
Состояние контактов реле 5 и 7 остается таким до тех пор пока в момент подачи сигнала iC датчика / контакт 5 остается в зоне
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической настройки на оптимальный режим работы машин виброударного действия | 1966 |
|
SU251433A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ МАШИНЫ ВИБРОУДАРНОГО ДЕЙСТВИЯ | 1972 |
|
SU339624A1 |
| Устройство для автоматического регулирования режима работы машин виброударного действия | 1977 |
|
SU729064A1 |
| Устройство для автоматического регулирования режима работы машины виброударного действия | 1976 |
|
SU551427A1 |
| МНОГОМЕСТНАЯ НОЛУАВТОМАТИЧЕСКАЯУСТАНОВКА ДЛЯ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХПАРАМЕТРОВ И КАЧЕСТВА ОБМОТОК СТАТОРОВЭЛЕКТРОДВИГАТЕЛЕЙ | 1968 |
|
SU428312A1 |
| Релейный распределитель | 1975 |
|
SU653761A1 |
| ВСЕСОЮЗНАЯ п-гг;; *•;!-'; Yr*'»iHUtr"ifAa | 1973 |
|
SU365850A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU365686A1 |
| Релейное переходное устройство для ретрансляции телеграфных сигналов, передаваемых аппаратами Бодо | 1947 |
|
SU84666A1 |
| Релейный распределитель | 1982 |
|
SU1140209A1 |
