Изобретение оТ1Носится к те.хличеокой кибернетике и может быть применено IB самонастраивающихся системах со ста1билизацией аздплитудно-частотных ха|рактери стик систем автоматического регулирования, если последние содержат IB себе нелинейный элем&нт, имеющий линейную характеристику с ограничением.
Известны са.монастраивающиеся устройства для стабилизации амплитудных хара ктеристи,к нелинейной системы управления с блоком регулируемого коэффициента усиления, содержащие подсоединенный к .01бъекту регулирования Через сумматор амплитудный детектор с фильтром и цепь ко ррекции из включенных (Последовательно инверсного фильтра, функционального преобразователя и линейной модели основного контура системы, подсоединенного через 1второй вход сумматора к а.мплитудному детектору.
Недоста. известных устройств является невысокая помехозащищенность.
Предложенное устройство отличается от известных тем, что в нем в цепь КОррекции включены последовательно соединенные второй блок регули.руемого коэффициента, усиления, кор ректирующи.й фильтр и нелинейный элемент типа «линейная зона с насыщением, подсоединенный к инверсному |фильтру, приче,м управляющие зажимы обоих блоков регулируемого коэффициента усиления и функционального преобразователя объединены и подключены к выходу фильтра амплитудного детектора.
Это повышает помехоустойчивость работы нелинейной системы при воздействии на нее шумовых мещающих воздействий.
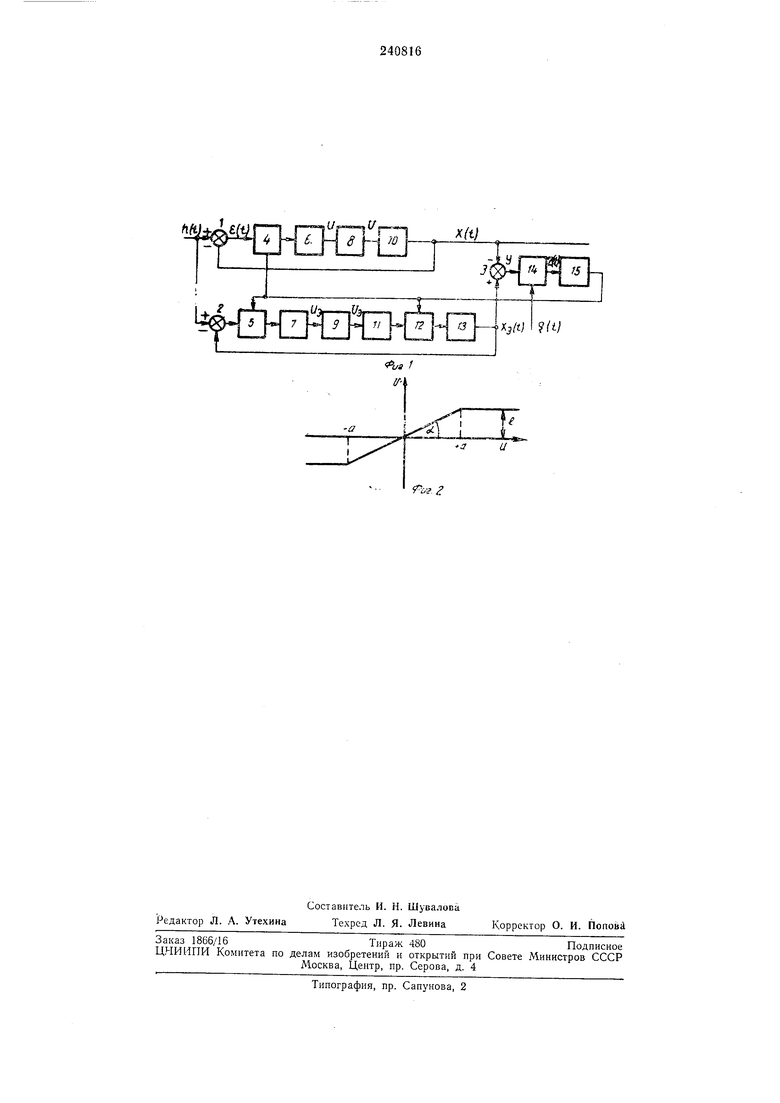
На фиг. 1 показана общая схема предлагаемого контура устройства са:монастрой|ки; на фиг. 2 - характеристика нелинейных эле.ментоБ.
Самонастраивающийся контур с нелинейной моделью (см. фиг. 1) содержи т элементы сравнения /-3, производящие оиерацию вычитания поступающи.х на них сишалов, например суммирующий усилитель постоянного тока.
Входной сигнал равен
h{t) /(0+/.oCOs(coo/+i(o) +n(t),
где }(t) -управляющая команда, являющаяся медленно меняющейся функцией времени,
А - амплитуда пробного сигнала (сигнала настройки),
г)о - начальная фаза .сигнала настройки, n(t) -1ВО|Змущени.е, действующее «а вхоа
OGHOiBHoro контура.
Контур содержит также регулято-ры 4, 5 коэффициента, усиле-ни-я осно.вного контура, нанри.мер электро.механическое или электронное множительное устройство;
корректирующие фильтры 6, 7, имеющие передаточную функцию Wi (S), например пассивную или активную цеиь систем яостоянного тока, (где 5 - комплексный аргумент); нелинейные элементы 8, 9, имеющие линейные характеристики с ограничением (см. фиг. 2), например усилитель .постоянного тока с .диодным ограничением (зона линейности элемента равна а, а коэффициент усиления линейного участка характеристики ра,вен
m tga);
объект регулирования 10, имеющий передаточную функцию /Со (5), например, механическую, электрическую, электромеханическую систему и т. п. (где /Со - коэффициент усиления объекта, являющийся функцией времени, а (5) -передаточная функция неизменяемой части объекта |регулироБания).
Блоки /, 4, 6, 8, 10 составляют основную систему автоматического регулирования.
Предложенное устройство включает также звено 11, имеющее передаточную функцию l/Wi(S), обратную передаточной функции корректирующего фильтра, например пассивную или активную цепи систем постоянного тока;
фуикцилнальный преОбразователь 12, выполняющий операцию, обратную операции регуляторов коэффициента усиления 4, 5, например электромеханический умножитель в сочетании с усили)телем постоянного тока; линейный эталон 13 W (S) основной системы автоматического регулкрования, например пассивную или активную цепь систем постоянного тока; амплитудный детектор 14, например электронное .множителиное устройство И: сглаживающий фильтр 15 с передаточной функцией P(S), например пассивную или активную цепь систем постоянного тока.
Ра|бота контура самонастройки (см. фиг. 1) в линейной зоне нелинейного элемента 4 аналогична ра,боте Контура самонастро йки, в котором модель ос1но вной системы линейна, и заключается в следующем.
Сравниваются синусоидальные соста1вляющие сигналов э(0 и X(t), образуя сигнал
,(t)-X(t}.
С помощью амплитудного детектО;ра 14 образуется си|гнал ошибки z(t}, который, пройдя
сглалсивающий фильтр 15, управляет коэффнциентом усиления Ki. Влияние шума приводит к тому, ЧТО регулируемый коэффициент колеблется вокруг требуемого значения. При действии входных сигналов и щумов, выводящих координату U на о.прани1чение, синусоидальная составляющая сигнала X(t) равна нулю, в то время ка1К синусоидальная составляющая координаты Ад (t) и сигнал на
входе амплитудного детектора g{t) не равны нулю. Это приводит к тому, что, хотя в основном (Контуре было установлено требуемое значение регулируемого коэффициента усиления KI, контур самонастройки (так как z(t) 0)
стремится установить максимально 1ВОЗможное значение коэффициента. Такое максимальное значение коэффициента /Ci может привести после уменьщения заправляющих сигналов и щумов к неустойчивости, а в ряде
случаев и IK полной утрате работоспособности основного контура.
Замена линейного эталона основного контура нелинейным (как -в предлагаемом контуре самонастройки) позволяет избежать нежелательного увеличения коэффициента усиления ДО максимального значения. Это происходит потому, что при действии управляющих сигналов и щумов сигналы, U и Ug выходят на ограничение одновременно. Поэтому в настроанно-м состоянии координата - X и z(t) приблизительно равны нулю, и контур самонастройки находится в равновесии.
Предмет изобретения
Самонастраивающееся устройство для стабилизации амплитудных характеристик нелинейной системы управления с блоком регули руемого коэффициента усиления, содержащее подсоединенный к объекту регулирования через сумматор амплитудный детектор с фильтром и цепь коррекции из включенных последо1Бательно инверсного фильтра, функционального преобразователя и линейной модели основного контура системы, подсоединенного
через второй вход сумлштора к амплитудному детектору, отличающееся тем, что, с целью повышения помехоустойчивости работы нелинейной системы при воздействии на нее щумовых мещающил воздействий, в нем в цепь
коррекции включены последовательно соединенные второй блок регулируемого коэффициента усиления, корректирующий фильтр и нелинейный элемент типа «линейная зона с насыщением, подсоединенный к инверсному
фильтру, причем управляющие зажимы обоих блоков регулируемого коэффициента усиления и функционального преобразователя объединены и подключены к выходу фильтра амплитудного детектора.
1-2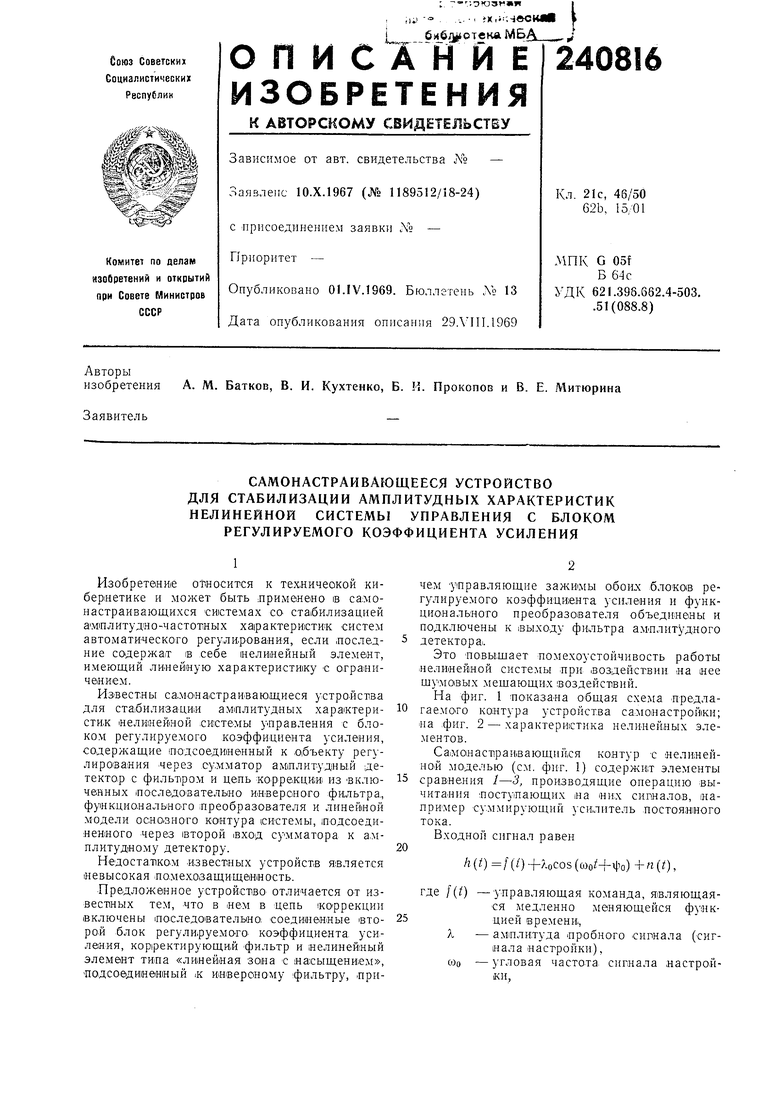
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО С ЭТАЛОННОЙ МОДЕЛЬЮ | 1972 |
|
SU328433A1 |
| СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1972 |
|
SU328427A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА С ЭТАЛОННОЙ МОДЕЛЬЮ | 1970 |
|
SU269248A1 |
| РЕЛЕЙНОЕ САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО | 1969 |
|
SU251045A1 |
| СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU280613A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| Самонастраивающаяся система регулирования | 1972 |
|
SU448432A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |