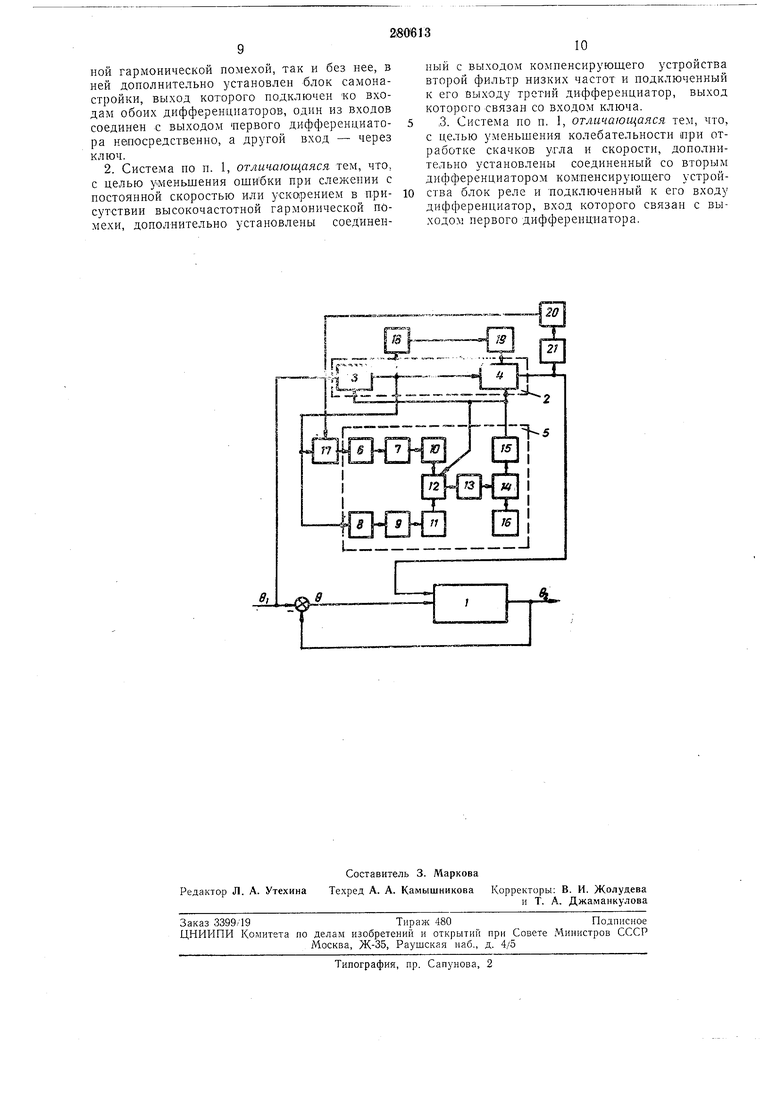
Изобретение относится к системам автоматического регулирования и может быть использовано при проектировании высокоточных следящих систем при наличии гармонической помехи во входном сигнале. Известны следящие системы комбинированного регулирования, содержащие основной контур регулирования и два дифференциатора компенсирующего устройства. Пусть, например, имеем передаточные функции основного контура Т,р + Т,, и дифференциаторов 1 (Р) К,-р, ..(P) , 1 ч- , где р- комплексная переменная: Т, Т - постоянные времени; TI, TZ,T, - постоянные коэффициенты; /С, /Ci - коэффициенты усиления. При воспроизведении входного воздействия Oi (ВВ) ошибку системы .можно представить в виде в 0к+вд+0у+в„, где 0к-ощибка, пропорциональная скорости ВВ; вд-ошибка, пропорциональная ускорению ВВ; 0у-ошибка, пропорциональная высшим производным ВВ; 9п - ошибка, вызванная помехой на входе. При воспроизведении ВВ видов е, (О U,t; в, (О -, Q, (О в„„.8ш ш/ (1) ля компенсации Ок и вд параметры компенирующих устройств нужно выбирать из усовий:к, , т т, + т,. ри этом компенсацию можно обеспечить при азличных значениях Т. При воспроизведении синусоидального поезного ситнала с наложенной на него гармоической помехой 0l(0 - eim-sinco 4-- mSincO,/, - амплитудное значение полезного ВВ; 3 Яш - амплитудное значение помехи; 2г. , со круговая частота полезного ВВ; Т - период полезного ВВ, -круговая частота помехи; Гп -период помехи,, , Ю В-системе ошибка определяется во-апроизведением полезного ВВ и помехой П(р): в(р) Фв lp)0i(yo) -Ф(/э)Я(р); 15 где Фв(п)± -передаточная функ 1 + К(р ) ция замкнутой системы по ошибке; ф(р) (),передаточная функ1 + (/) ция замкнутой системы;®р-передаточная функ- 25 ция Компенсируюш,его устройства. При использовании эквивалентной переда„ч м точной функции разомкнутой системы Лв(р) 30 ошибка выралсается в(/г) QI(P), 1 + Кэ(р) i + K3(p) /7(/) впС/) + 0фС) 35 где KB ; 1 - Ф (р) ©ф(р)-ошибка от полезного ВВ; ®п(р)-ошибка, вызванная помехой. 40 Суш,ественным недостатком следяших систем комбинировапного регулирования (ССКР) является то, что, обеспечивая минимальные ошибки при воспроизведении вход- 45 кого воздействия видов (1), они имеют большую ошибку в случае, если на него палол ена гармоническая помеха вида n(t) , а также повышенную колебательность при отработке скачков угла и скорости 50 0i(0 1(0 0i(0 Цель предлагаемого изобретения состоит в минимизации ошибок как при ВВ вида (1), 55 так и в случае, если на ВВ наложена гармоническая помеха n(t) eimSinco, а также в уменьшении колебательности при 60 стработке ВВ вида Qi(t) nit-, (3) 0i()l(/). 65 20 4 Рассмотрим условия, при которых ошибка от полезного ВВ будет минимальной Э.(р).(,), или в области комплексного переменного jco, Эф(/ш) j , / ®i(/) так как в и вд скомпенсированы соответствующим выбором параметров компеНсирую/Ших устройств (/da -, Ti ГЗ + ГЕ, то в системе будут присутствовать ошибки, выз, апные высшими производными от ВВ. Если , то i/Cs (/со) I 1, и максимальную ошибку вф можно представить в виде п 1 п - 1 т так как .(где HI - амплитудное значение скорости ВВ), то и - -IT - - . Дч{/4) i э./ л последнего выражения следует, .что для уменьшения вф нужно увеличить |/С9(/со)|. Если (О изменяется в небольших пределах, то увеличение |/Сэ (/со) | для сохранения ошибки или ее уменьшения при изменении KIT нужно вести пропорционально п. Составляющая ошибки, вызванной помехой в области комилексного переменного /со, имеет вид к (i п(И 1 ,У/.. (НВ случае, если частота помех , то /Сд (/со)-С1, и ошибку от помехи можно представить как Q /.% ((,) n(i(f nw ; эй; 1 ) или вп (/со) |Ят, т. е. чем меньше Ka(j(f), тем меньше ошибка от помехи. Можно найти выражение минимума |/Cs(/co)| min как функции Гд. Для этого необходимо дважды продифференцировать по Т. В результате получим | f () | о при Т,. «следовательно, увеличивая /si можно уменьшить ошибку, вызванную помехой. Вполне понятно, что с уменьшением частоты помехи нужно увеличивать постояиную времени Т компенсирующего устройства, чтобы вторая производная помехи ие проходила в систему С увеличением частоты помехи молшо без ущерба уменьшить Гх. Однако при этом для компенсации ошибок, таропор циональных скорости и ускорению ВВ, нужно сохранить условия их комненсации. При воопроизведенян нолезного ВВ с наложенной на него помехой (2) ошибки, вызванные скоростью и ускорением ВВ, скомпенсированы соотзетствуюш.им образом вььбранными параметрами компенсирующих устройств в данном случае /Cjcc -, Г4 Гд 4-TS Для компенсации ошибок, пропорциональных высшим производным, нужно уменьшать постоянную времени компенсируюш,их устройств пропорционально амплитудному значению скорости полезного ВВ, но, с другой стороны, для уменьшения ошибки, вызванной помехой, нужно увеличивать Т- с уменьшением частоты помехи, сохраняя при этом условия компенсации OK и в д. Следовательно, для обеспечения минимальной ошибки от высших производных и от помехи изменение Т- нужно вести в зависимости от соотношения KIT и coni т. е. ву + Эп /,,(л.1,со„) /(Г5), обязательно сохраняя при этом условия компенсации 0к и 0д , таким об,разом, с изменением TS нужно одновременно изменять а так, чтобы Тз, Гд -|- Г., и /Cicc - . При воспроизведении полезного ВВ с наложенной на него иомехой вида: Qi(t) Я1 +Ят31По п ©1(0 - ,sinco в системе будут присутствовать ошибки в вк+0п в первом сяучае ® во втором случае. Компенсация ошибок ©к и Эд обеспечивается за счет введения компенсирующих сигналов, пропорциональных 1-й и 2-й производной от ВВ, и выбора параметров компенсирующих устройств из условия 0к о и 0д 0. Для уменьшения 0п, как было показано выше, нужно изменять значение постоянной времени компенсирующего устройства Т-, сохраняя при этом условия компенсации 0,; и 0д, т. е. с изменением Т- нужно одновременно изменить а так, чтобы /Cia -; 4 Гз-f Гз. Кроме того в ССКР при ВВ вида (3) в основной контур будут поступать дополнительные форсирующие сигналы за счет наличия компенсирующих устройств при еио 1 (О (/) фб (О +ф;, где 6(0 импульсная характеристика; t Ф /da, ф J - 1,1 - что будет вызывать повышенную колебательность. Для уменьшения повышенной колебательности в этих случаях нужно уменьшать уровень форсирующих сигналов за счет значительного увеличения постоянной времени компенсирующих устройств з в определенные моменты В;ремени. Предложенное устройство отличается от известных тем, что в нем дополнительно установлен блок самонастройки, выход которого подключен ко входам обо«х дифференциаторов, один из входов соединен с выходом первого дифференциатора не 1осредственно, а другой вход - через ключ. Кроме этого, система отличается тем, что в ней дополнительно установлены соединенный с выходом компенсирующего устройства второй фильтр низких частот и подключенный к его выходу третий дифференциатор, выход которого связан со входом ключа, а также дополнительно установлены соединенный со вторым дифференциатором компенсирующего устройства блок реле и подключенный к его входу еще один дифференциатор, вход которого связан с выходом первого дифференциато-ра. На чертеже представлена блок-схема рледящей системы. Вход основного контура регулирования / с передаточной функцией /С (р) соединен с выходом компенсирующего устройства 5 с передаточной функцией ф(/), состоящего из двух последовательно соединенных дифференциаторов 5 с передаточной функцией /Ciap и 4спе- .„ 1 -f Контур саморедаточнои функцией настройки 5 состоит из фильтра нижних частот 6, пропускающего полезный сигнал, выход которого соединен со схемой измерения и запоминания амплитуды 7; фильтра верхних частот 8, пропускающего помеху, выход которого соединен со схемой измерения частоты 9. Выходы схем измерения и запоминания амплитуды 7 и измерения частоты 9 через масштабные устройства 10, 11 соответственно соединены с суммирующим устройством 12. Выход суммирующего устройства 12 соединен с входом релейного усилителя 13. выход которого соединен с входом усилителя мощности 14, выход последнего, в свою очередь, соединен с шаговым искателем 15. Кроме того в контур самонастройки 5 входит тактовый генератор 16, который соединен с усилителем мощности 14. Вход фильтра верхних частот 8 соединен с выходом дифференцирующего устройства 3, с которым также соединен вход фильтра нижних частот 6 через ключ 17. Выход контура самонастройки 5, т. е. выход шагового искателя 15 (подвижный контакт), соединен с дифференцирующими
устройством 12. Вход дифференцирующего устройства 18 соединен с выходом дифференцирующего устройства 3, а выход - с блоком реле 19, который соединен с дифференцнрующим устройством 4. Вход диффере1щирующего устройства 20 через вто1рой фильтр нижних частот 21, Н|рОПускаюи.шй полезный сигнал, соединен с выходом дифференцирующего устройства 4, а выход - с ключом 17.
При слежении с постоянной скоростью или с лостоянным ускорением в отсутствие помехи на выходе фильтра верхних чаСтот 8, а следовательно, и на выходах схемы измерения частоты 9 и масщтабного устройства // сигнал отсутствуем На выходе масщтабиого устройства 10 сигнал также отсутствует, так как цепь дифференциатор 3 - фильтр нижних частот 6 разомкнута ключом 17, лотому что на выходе дифференцирующего устройства 20, вырабатывающего сигнал, -нропорциональный 3-й производной ОТ ВВ, при слежении с постоянной скоростью сигнала нет, а ири слежении с постоянным ycKOipein-ieM будет сигнал ГгДзе, вызванный запаздыванием дифференциатора 4 (постоянная времени Т) и недостаточный для срабать вания ключа 17.
Контур самонастройки 5 не изменяет ни параметры суммирующего устройства 12, ни параметры дифференцирующих устройств 3, 4, а условия компенсации ощибок 0к, 0д, пролорциональных скорости и ускорению ВВ, выполняются. При наличии высокочастотной гармонической помехи, наложенной на полез иый сигнал, на выходе фильтра верхних частот 8 будет напряжение, нропо1рциональное частоте и скорости помехи, а на выходе схемы измерения частоты 9, а следовательно, и на выходе масштабного устройства 11 будет сигнал, обратно пропорциональный частоте помехи. Сигнал с масщтабного устройства 10 отсутствует, так как помеха не проходит через фильтр нижних частот 21 на вход дифференцирующего уст1ройства 20, и ключ 17 разомкнут.
На выходе суммирующего устройства 12 будет сигнал, пропорциональный частоте помехи, который, усиливаясь в усилителях /, 14, поступает на щаговый искатель 15, который изменяет положение своей выгодной величины па угол, лропорциональный выходной величине суммирующего, устройства, с частотой работы тактового генератора 16, изменяя при этом параметры дифференцирующих устройств 3 и 4 (увеличивая постоянную времени TS дифференцирующего устройства 4, т. е. увеличивая степень фильтрации «помехи и одновременно изменяя коэффициент а дифференцирующего устройства 3, что обеспечивает сохранение условий компенсации ошибок 0к и 0д).
При повороте на определенный угол, лропорциональный частоте помехи, за счет наличия обратной связи с выхода шагового искателя 15 на суммирующее устройство 12 подвил ный контакт шагового искателя 15 остакавли,вает€я. В результате параметры компенсирующего устройства 2 изменяются таким образом, что обеспечивается минимальная ошибка от помехи и сохраняются условия компенсации установившихся ощибок Эк и 0д.
При воспроизведении синусоидального полезного ВВ с наложенной на него высокочастотной гармонической помехой система работает следующим образом. На выходе дифференцирующего устройства 20 будет сигнал, от которого срабатывает ключ 17, подключая фильтр нижних частот 6 к .выходу дифференцирующего устройства 3. На входы фильтров ниж«их частот 6 и верхних частот 8 подается сигнал скорости ВВ и скорости помехи. На выходе схемы заломинания амплитуды 7, а следовательно, и на выходе масштабного устройства 10 формируется сигнал, пропорциональный амплитудному значению скорости полезного ВВ. На выходе схемы измерения частоты 9, а следовательно, и на выходе масштабного устройства 11 формируется сигнал, обратно пропорциональный частоте помехи. С выходов масштабных устройств 10 и 11 сигналы подаются на суммирующее устройство 72. на выходе которого формируется сигнал, пропорциональный алгебраической разности амплитудного значения скорости полезного ВВ и частоты наложенной на него помехи.
В дальнейшем контур самонастройки работает аналогично. В результате изменения -параметров компенсирующих устройств в системе обеспечивается минимальная ошибка при данном соотношении параметров полезного В В и помехи.
Лри отсутствии помехи шаговый искатель 15 изменяет положение своей выходной величины на угол, пропорциональный амплитудному значению скорости ВВ, из1меняя при этом Параметры дифференцирующих устройств 3 а 4 таким образом, что сохраняются условия компенсации ©к и вд и минимально возможная для этой системы ошибка от выещих производных входного воздействия.
При отработке скачков угла и скорости дифференцирующее устройство 18 вырабатывает импульс, от которого срабатывает блок реле 19 на время /я«02 сек, и изменяет при этом параметры дифференцирующего устройства 4 (значительно увеличивая его постоянную времени и уменьщая коэффициент передачи), в результате чего в основной контур системы 1 лишь частично проходит форсирующий импульс, уменьшая тем самым колебательность ССКР.
Предмет изобретения
1. Следящая система комбинированного регулировапия, содержащая основной контур регулирования и два дифференциатора ком.пенсирующего устройства, отличающаяся тем, что, с целью уменьщения ощибки при воспроизведении синусоидального входного воздействия как С наложенной на него высокочастотной гармонической помехой, так и без нее, в ней дополнительно установлен блок самонастройки, выход которого нодключен ко входам обоих дифференциаторов, один из входов соединен с выходом иервого дифференциатора непосредственно, а другой вход - через ключ.
2. Система ио п. 1, отличающаяся тем, что, с целью уменьшения ошибки при слежении с постоянной скоростью или ускорением в присутствии высокочастотной гармонической помехи, дополнительно установлены соединенный с выходом компенсирующего устройства второй фильтр низких частот и подключенный к его выходу третий дифференциатор, выход которого связан со входом ключа.
,3. Система по п. , отличающаяся тем, что, с целью уменьшения колебательности при отработке скачков угла и скорости, дополнительно установлены соединенный со вторым дифференциатором компенсирующего устройства блок реле и подключенный к его входу дифференциатор, вход которого связан с выходом первого дифференциатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1972 |
|
SU328427A1 |
| КОМБИНИРОВАННЫЙ СЛЕДЯЩИЙ ПРИВОД | 1970 |
|
SU259227A1 |
| КОМБИНИРОВАННЫЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU304550A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU376751A1 |
| Следящая система | 1975 |
|
SU550617A1 |
| Устройство для сейсмической разведки | 1979 |
|
SU750410A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА | 1969 |
|
SU253895A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Самонастраивающийся привод | 1979 |
|
SU851338A1 |
| ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU296116A1 |