Изобретение относится к системам автоматического регулирования (следящие системы комбинированного регулирования ССКР) и иредназначено для высококачественного воспроизведения сложных сигналов, ностунающих на вход системы в виде напряжений, при стационарных случайных помехах во входном сигнале.
Известны следящие системы комбинированного регулирования, содержащие элемент сравнения и блоки основного контура следящей системы, а также соединенный с входом следящей системы первый дифференциатор, выход которого нодключен к блоку с регулируемым пределом насыщения. Блок с регулируемым пределом насыщения связан с входом блоков основного контура следящей системы и с вторым дифференциатором, соедниенным через второй блок с регулируемым пределом насыщения с входом блоков основного конгура следящей системы.
Системы такого тина при хорошем качестве переходных процессов и необходимой динамической точности плохо фильтруют помехи, так как у них широкая полоса пропускания, и наоборот, при достаточно хорощей фильтрации помехи во входном сигнале они имеют затянутые переходные процессы при отработке входного воздействия (ВВ) типа 1 (7) и
малую динамическую точность, обусловленную узкой нолосой нропускання системы.
Пред:лагаемая система отличается тем, что она содержит контур самонастройки, выполпенный из последовательно соединенных фильтра высокой частоты и усреднителя, выход которого связан с вторым дифференциатором, а вход фильтра подключен к выходу элемента сравнения.
Введение контура самонастройки предлагаемого типа дает возможность путем изменения полосы пропускания системы в зависимости от параметров полезного входного воздействия (ВВ) иолучать необходимую точность
воспроизведеиия полезного ВВ в рабочей полосе частот и при заданном ВВ обеспечивать наилучщую фильтрацию помехи, что значительно улучшает качественные показатели ССКР (исправность работы, потребление
мощности и т. д.).
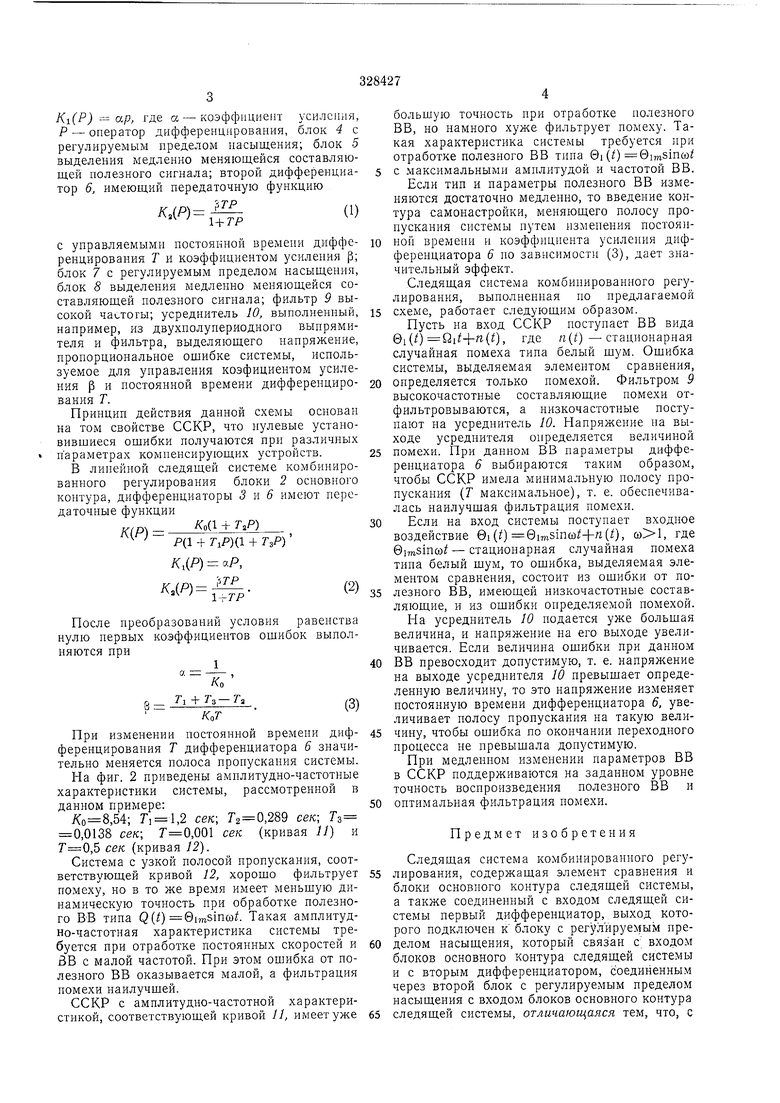
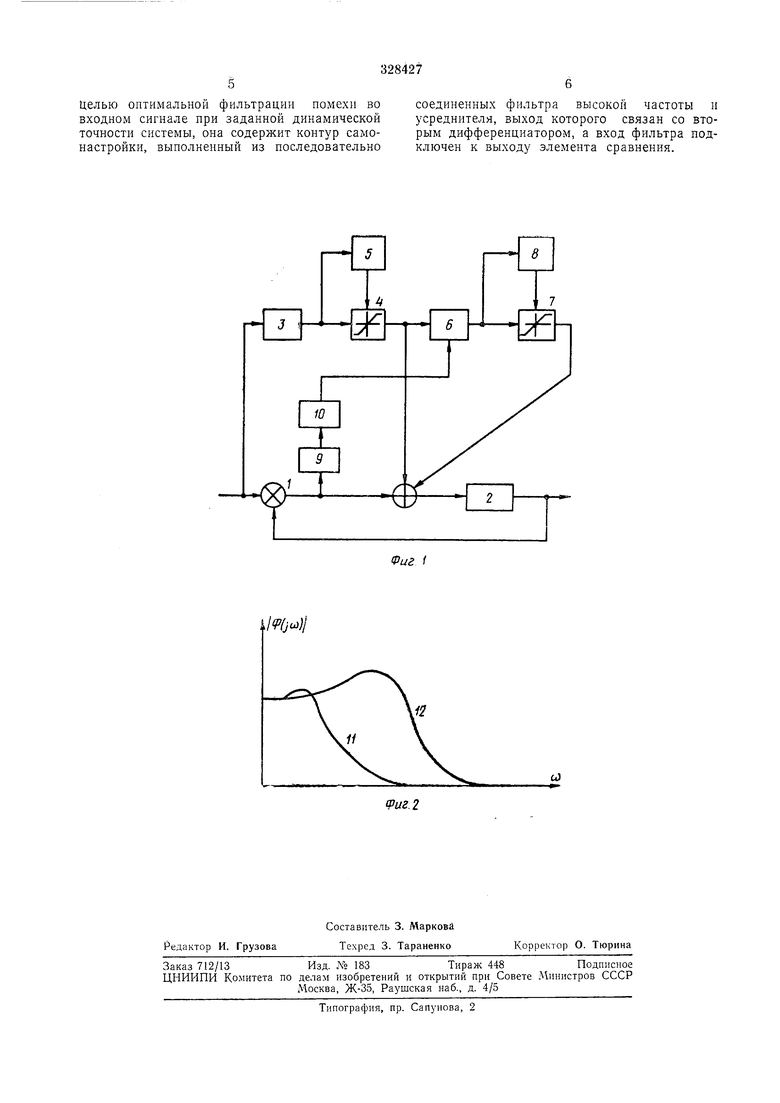
На фиг. 1 показана блок-схема предлагаемой следящей системы комбинированного регулирования; на фиг. 2 - изменение иолосы пропускаиия ССКР ири изменении постоянпой времени дифференцирующего звена. Кг(Р) - ар, где а - коэффициент усилспня Р - оператор дифференцирования, блок 4 с регулируемым пределом насыщения; блок 5 выделения медленно меняющейся составляющей цолезного сигнала; второй дифференциатор 6, имеющий цередаточную функцию К,(Р) с управляемыми ностоякной времени дифференцирования Т и коэффициентом усиления р; блок 7 с регулируемым пределом насыщения, блок 8 выделения медленно меняющейся составляющей полезного сигнала; фильтр 9 высокой частоты; усреднитель 10, выполненный, например, из двухнолупериодного выпрямителя и фильтра, выделяющего напряжение, пропорциональное ощибке системы, используемое для управления коэфициентом усиления р и постоянной времени дифференцирования Г. Принцип действия данной схемы основан на том свойстве ССКР, что нулевые установившиеся ошибки получаются нри различных параметрах компенсирующих устройств. В линейной следящей системе комбинированного регулирования блоки 2 основного контура, дифференциаторы 3 и 6 имеют передаточные функции о(1 + ) Р(1 + ТгР)(1 + ТзР) К,(Р) О.Р, После преобразований условия равенства нулю первых коэффициентов ошибок выполняются при g Гд -1- Гз-Га КоТ При изменении постоянной времени дифференцирования Т дифференциатора 6 значительно меняется полоса нронускания системы. На фиг. 2 приведены амплитудно-частотные характеристики системы, рассмотренной в данном примере: 7(,54; Г, 1,2 сек; ,289 сек; Гз 0,0138 сек; ,001 сек (кривая 11) и ,5 сек (кривая 12). Система с узкой полосой пропускания, соответствующей кривой 12, хорошо фильтрует помеху, но в то же время имеет меньшую динамическую точность при обработке полезного ВВ типа Q(/) eimsinco. Такая амплитудно-частотная характеристика системы требуется нри отработке постоянных скоростей и ЗВ с малой частотой. При этом ошибка от полезного ВВ оказывается малой, а фильтрация помехи наилучшей. большую точность при отработке полезного ВВ, но намного хуже фильтрует помеху. Такая характеристика системы требуется нри отработке полезного ВВ тпна ei(/) eimsinco с максимальными амплитудой и частотой ВВ. Если тип и параметры полезного ВВ изменяются достаточно медленно, то введение контура самонастройки, меняющего полосу пропускания системы путем изменения постоянной времени и коэффициента усиления дифференциатора 6 по зависимости (3), дает значительный эффект. Следящая система комбинированного регулирования, выполненная по предлагаемой схеме, работает следующим образом. Пусть на вход ССКР поступает ВВ вида @i(t)(t), где n(t)-стационарная случайная помеха типа белый шум. Ощибка системы, выделяемая элементом сравнения, определяется только помехой. Фильтром 9 высокочастотные составляющие помехи отфильтровываются, а низкочастотные поступают на усреднитель 10. Напряжение на выходе усреднителя определяется величиной помехи. При данном ВВ параметры дифференциатора 6 выбираются таким образом, чтобы ССКР имела минимальную полосу нропускания (7 максимальное), т. е. обеспечивалась наилучшая фильтрация помехи. Если на вход системы поступает входное воздействие ei(0 0imsinMi+«(i), , где 0imsincu -стационарная случайная помеха типа белый щум, то ощибка, выделяемая элементом сравнения, состоит из ошибки от полезного ВВ, имеющей низкочастотные составляющие, и из ощибки определяемой помехой. Па усреднитель 10 подается уже больщая величина, и напряжение на его выходе увеличивается. Если величина ошибки при данном ВВ нревосходит допустимую, т. е. напряжение на выходе усреднителя 10 нревыщает определенную величину, то это нанряжение изменяет ностоянную времени дифференциатора 6, увеличивает полосу пропускания на такую величину, чтобы ошибка по окончании переходного процесса не превышала допустимую. Прн медленном изменении параметров ВВ в ССКР поддерживаются на заданном уровне точность воспроизведения полезного ВВ и оптимальная фильтрация помехи. Предмет изобретения Следящая система комбинированного регуирования, содержащая элемент сравнения и блоки основного контура следящей системы, а также соединенный с входом следящей системы первый дифференциатор, выход которого подключен к блоку с peгyлиpye ЫiM преелом насыщения, который связан с; входом локов основного контура следящей системы с вторым дифференциатором, Соединенным ерез второй блок с регулируемым пределом асыщения с входом блоков основного контура ледящей системы, отличающаяся тем, что, с
Целью оптимальной фильтрации помехи во входном сигнале при заданной динамической точности системы, она содержит контур самонастройки, выполненный из последовательно
соединенных фильтра высокой частоты и усреднителя, выход которого связан со вторым дифференциатором, а вход фильтра подключен к выходу элемента сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU280613A1 |
| КОМБИНИРОВАННЫЙ СЛЕДЯЩИЙ ПРИВОД | 1970 |
|
SU259227A1 |
| Самонастраивающаяся система управления | 1978 |
|
SU744446A1 |
| Устройство для сейсмической разведки | 1979 |
|
SU750410A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА | 1969 |
|
SU253895A1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU320805A1 |
| СПОСОЬ РЕГУЛИРОВАНИЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ, ОПИСЫВАЕМЫХ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИп-ого ПОРЯДКА | 1969 |
|
SU239405A1 |
| Следящая система | 1977 |
|
SU642676A1 |
| Система автоматического управления | 1974 |
|
SU556413A1 |
о)
