Данное изобретение относится к области измерителей параметров движения.
Известные пневматические датчики оборотов, содержащие чувствительный элемент в виде груза, расположенного в гнезде, к которому подведены каналы подачи питания и сброса воздуха в атмосферу, весьма чувствительны « вибрациям и имеют узкий диапазон измерений.
Предлагаемый датчик в значительной мере повышает надежность ра;боты датчика в условиях вибрации и расширяет диапазон измерений.
Это достигается тем, что он снабжен не менее чем одним дополнительным чувствительным элементом, выполненным в виде тела вращения, например усеченного конуса, при этом каиал подачи питания выведен на поверхность выступа в .гнезде груза, а канал сброса связан с камерой, обхватывающей указанный выступ.
Контактирующие поверхности груза и выступа выполнены с радиусом кривизны, превышающим диаметр груза.
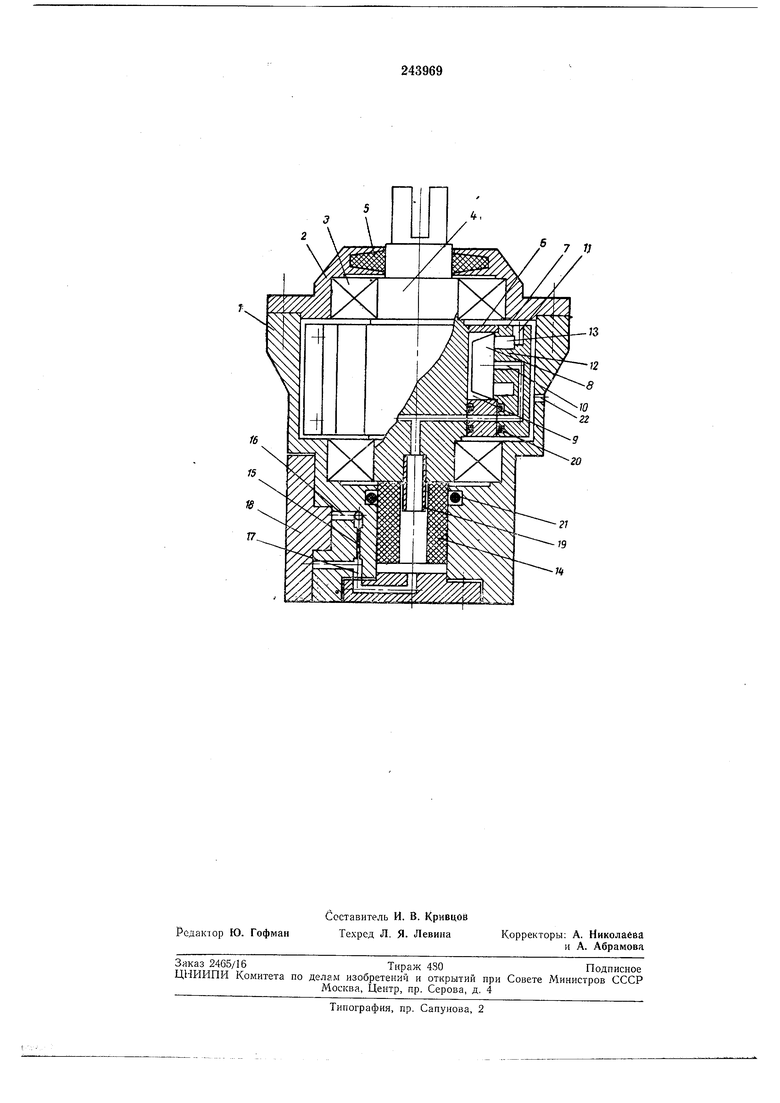
На чертеже схематично представлен описываемый датчик.
сальником 5. Кроме того, на этом валу расположены фланцы 6, крышки 7 и грузы 8. Груз 8, выполненный в виде тела вращения, например усеченного конуса с плоской торцовой поверхностью, расположен в гнезде 9, к которому подведен канал 10 подачи питания и канал 11 сброса воздуха в атмосферу. Канал 10 выведен на торцовую поверхность выступа 12, вокруг которого расположена камера 13, связанная непосредственно с каналом 11. Канал 10 с помощью уплотнительной втулки 14 из антифрикционного материала соединен с дросселем 15, к которому по .каналу /5 подается питание через штуцер (на чертеже не показан). Груз S в гнезде 9 расположен с радиальными осевыми зазорами, каждый из которых не превышает диаметра дросселя 15. Канал 10 соединен с каналом 17, который связан с выходным усилителем 18 мощности. Для защиты канала 10 от попадания частиц износа втулки 14 в вал 4 запрессована перекрывающая втулка 19, а герметизация тяги от дросселя 15 до канала 10 обеспечена уллотнительными кольцами 20 и 21. Внутренняя полость корпуса 1 через отверстие 22- сообщается с атмосферой.
НИИ вала 4, хотя бы один из них отойдет или будет отброшен давлением в канале 10 от поверхности выступа 12. В результате этого воздух, посту-нающий в канал 10 от дросселя 15, через канал 11 будет сбрасываться в атмосферу, и давление в канале 10 упадет до нуля.
При вращении вала 4 центробежная сила будет прижимать груз 8 к поверхности выступа 12. Так как на эту поверхность выведен канал /О н в него постоянно поступает питание от дросселя 15, то давление в канале 10 станет увеличиваться. При достижении «м такой величины, когда сила его действия на поверхность груза 8 превысит центробежную силу, прижимающую груз 8 к поверхности выступа 12, груз отойдет от нее и соединит канал 10 с каналом //. Избыток .воздуха стравится, давление в канале 10 упадет, уменьшится сила действия давления на груз, и последний под влиянием Центробежной силы снова закроет канал 10. После этого процесс повторится.
Каждому значению величины центробежной силы вращения грузов 8 будет соответствовать определенное значение давления в -канале 10, а так как последний соединен с усилителем 18, то, следовательно, « значение выходного сигнала датчика.
Поверхность выступа 12 и прилегающая к ней поверхность груза 8 выполнены плоскими, между ними образована воздушная подушка, давление в которой падает от -центра к «раю. Поскольку давление питания перед дросселем 15 постоянно, то количество воздуха, стравливаемого из канала 10 при различных величинах давления в нем, будет различно. Величина же площади щели, через которую воздух может стравливаться в атмосферу из канала 10, целиком определяется расстоянием между поверхностями груза 8 « выступа 12, т. е. толщиной воздушной подушки. При изменении же толщины ее будет меняться распределение давления в ней. Поэтому давление в канале 10 изменяется не прямо оропорционально центробежной силе вращения грузов S, зависящей от квадрата числа оборотов вала 4, а по более сложному закону. В результате характеристика датчика оказывается линеаризованной, и диапазон измеряемых датчиком скоростей вращения расширяется в сторону малых значений.
Аналогичным образом происходит линеаризация характеристики датчика и в случае выполнения контактирующих поверхностей груза и выстуца с радиусом кривизны, нревьгшающим диаметр груза.
При воздействии на датчик вибраций появляющиеся инерционные силы могут переместить на воздушной подушке груз либо параллельно Поверхности выступа 12 на величину
радиального зазора, либо еще и развернуть его относительно кромки этой поверхности на величину, зависящую от диаметра груза и размера осевого зазора. Благодаря тому, что груз расположен в гнезде 9 с радиальными и
осевыми зазорами, меньщими диаметра дросселя 15, эти возможные перемещения груза относительно малы. Параллельное или близкое к параллельному перемещение плоских поверхностей относительно друг друга не изменяет картины взаимодействия и не оказывает влияния на суммарное усилие воздушной подушки, удерживающее груз. Поэтому давление в канале 10, а значит, и на выходе датчика, остается неизменным и при появлении
вибраций.
В случае выполнения -контактирующих поверхностей груза 8 и выступа 12 с радиусом кривизны, превышающим диаметр груза, работа датчика в условиях вибраций происходит
аналогично.
Предмет изобретения
1.Пневматический датчик оборотов, содержащий чувствительный элемент в виде груза,
расположенного в гнезде, к которому подведены каналы подачи питания и сброса воздуха в атмосферу, отличающийся тем, что, с целью повышения надежности работы датчика в условиях вибрации и расширения диапазона измерений, он снабжен не менее чем одним дополнительным чувствительным элементом, выполненным в виде тела вращения, например усеченного конуса, при этом канал подачи питания выведен на поверхность выступа в гнезде груза, а канал сброса связан с камерой, обхватывающей указанный выступ.
2.Датчик по о. 1, отличающийся тем, что радиусы кривизны поверхностей выступа и
груза больше диаметра груза.
7 г;
J3
74
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДАЧИ И ВРАЩЕНИЯ БУРОВОГО ОРГАНА | 1969 |
|
SU246435A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СКОРОСТИ ДВИЖЕНИЯ | 1969 |
|
SU257684A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПОСТОЯНСТВА ЗАЗОРА МЕЖДУ ДАТЧИКОМ И КОНТРОЛИРУЕМЫМИЗДЕЛИЕМ | 1970 |
|
SU287388A1 |
| АППАРАТ ДЛЯ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 1972 |
|
SU351543A1 |
| ПНЕВМАТИЧЕСКОЕ ЗАДАЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU326567A1 |
| ТОПЛИВНЫЙ НАСОС | 1972 |
|
SU333283A1 |
| Станок для двухсторонней обработки гибких дисков | 1985 |
|
SU1328072A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА | 1973 |
|
SU392468A1 |
| ФРИКЦИОННАЯ МУФТА | 1973 |
|
SU394603A1 |
| ПДЩТНО-ТГХКЯ^ЕСШ!БИБЛИОТЕКА | 1971 |
|
SU299659A1 |