Известен роторный экскаватор, включающий ходовую часть, поворотный .круг, рабочий орган с ротором и роторной стрелой, разгрузочную стрелу с механизмом поворота и консоль противовеса с расположенным на ней подвижным противовесом.
Предложенный экскаватор отличается тем, что подвижной противовес выполнен в виде тележки со смонтированными в направляющих, закрепленных внутри консоли противовеса, катками. На тележке установлена тяговая лебедка, соединяющая посредством тяговых канатов, пропущенных через шарнирно смонтированные на подвижном противовесе балансирные коромысла н жестко закренленные на консоли блоки, тележку подвижного противовеса с консолью, причем тяговая лебедка совместно с механизмом поворота разгрузочной стрелы включена в электрическую сельсинную день.
Указанные отличия позволяют упростить расчетную схему экскаватора и уменьшить его вес; они могут быть использованы для роторных экскаваторов как с невыдвижной, так и выдвижной роторной стрелой.
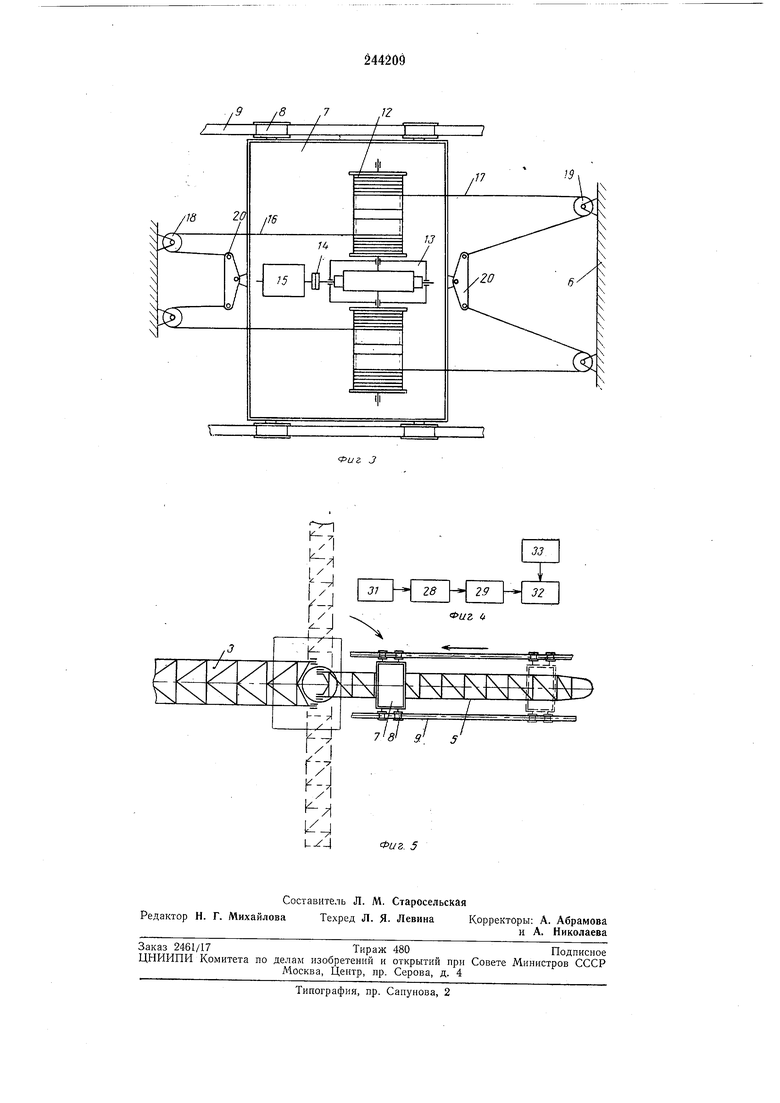
На фиг. 1 представлена общая компоновка предлагаемого роторного экскаватора с подвижным противовесом; на фиг. 2 - поперечный разрез экскаватора но несущей конструкчии консоли нротивовеса с расположенным в
ее внутренней полости подвижным противовесом и разрез механизма привода бесконтактного сельсин-датчика; на фиг. 3 - кинематическая схема механизма передвижения противовеса по несущей консоли; на фиг. 4 - блоксхема взаимосвязи между механизмом передвижения противовеса и механизмом поворота разгрузочной стрелы экскаватора; на фиг. 5- схема расноложения подвижного противовеса
на несущей консоли в зависимости от положения разгрузочной стрелы в плане.
Экскаватор включает ходовую часть /, поворотный 2, рабочий орган с ротором и роторной стрелой 3, надстройку 4, подвесную
разгрузочную стрелу 5, консоль 6 противовеса с расположенным на ней подвижным противовесом 7.
Противовес 7 выполнен в виде тележки и опирается катками 8 на направляющие 9, неподвижно закрепленные на нижнем поясе несущей балки консоли 6. На тележке противовеса 7 расположены балластные грузы 10 и канатная двухбарабанная лебедка 11, предназначенная для неремещения противовеса 7
по направляющим 9.
Лебедка 11 состоит из двух барабанов 12 одинакового диаметра, редуктора 13, соединительной муфты М и приводного электродвигателя 15. На каладый из барабанов 12
таким образом, что при вращении барабана в ту или иную стороиу один из канатов наматывается на поверхность барабана, а другой сматывается с нее, или наоборот. Канаты 16 и 17 через системы обводных блоков соответственно 18 и 19, жестко закрепленные на консоли 6, и балансирные коромысла 20, закрепленные шарнирно на тележке нротивовеса 7, связывают между собой тележку противовеса и консоль.
По оси О-О новорота верхнего строения экскаватора расположен вертлюг 21, предназначенный для нодвески к верхнему строению машины стрелы 5 посредством каната 22, проходящего через блочную систему 23 внутри полости вертлюга к лебедке подъема стрелы 5. Вертлюг 21 закреплен на консоли 6 в подшипниках 24 и 25 с возможностью вращения вокруг вертикальной оси О-О под воздействием поворота в плане стрелы 5, которая передает вращепие вертлюгу через канат 22.
На конце корпуса вертлюга 21 жестко закреплена зубчатая шестерня 26, которая постоянно находится в зацеплении с приводной шестерней 27 сельсин-датчика 28, жестко закрепленного в проточке несущей балки консоли 6. Сельсин-датчик электрически связан с сельсин-приемником 29, установленным в кабине 30 унравления экскаватора, а через него - с лебедкой 11 перемещения нротивовеса. В кабине также установлен ручной сельсинный командоаппарат, предназначенный для перемещения противовеса 7 по консоли при изменении способа отработки забоя (вертикальными или горизонтальными стружками).
На блок-схеме (см. фиг. 4) приняты следующие обозначения; 31 -механизм поворота разгрузочной стрелы, 32 - механизм передвижения противовеса; 33-ручной сельсин-задатчик.
Работает экскаватор следующим образом.
При повороте в плане стрела 5 через канат 22, блочную систему 23, вертлюг 21 и шестерню 26 поворачивает вокруг вертикальной оси шестерню 27 сельсин-датчика, сельсины которого в зависимости от угла взаимного поворота стрелы 5 и консоли 6 противовеса вырабатывают соответствующий электрический сигнал на перемещепие тележки противовеса 7. Этот сигнал передается по электрической цени через сельсин-приемник, расположенный в кабине управления, на привод лебедки //.
Электродвигатель 15 лебедки, получив сигнал от сельсин-датчика 28, через муфту 14 и редуктор 13 приводит во вращение барабаны 12. Барабаны 12, получая вращение в ту или иную сторону, наматывают одну из пар канатов (например, два каната 16) на поверхность барабана (другая пара канатов
в это время сматывается) и сообщают противовесу 7 через систему блоков 18 (или 19) и коромысла 20 перемещение по направляющим 9 на величину, соответствующую времени действия сигнала от сельсина-датчика.
Наличие двух тяговых канатов 16 (или 17) при движении противовеса 7 в том или ином направлении обеспечивает центральное приложение тяговых усилий от лебедки к противовесу и предотвращает возможность самопроизвольного движения противовеса в случае обрыва одного из тяговых канатов и при стоянии экскаватора на уклоне, что молсет привести к аварии мащины при значительном
весе противовеса.
При переходе от способа отработки забоя вертикальными стружками к отработке горизонтальными стружками или наоборот привод лебедки 11 получает сигнал на определенное
расчетное перемещение противовеса 7 от ручного сельсинного командоаппарата, установленного в кабине управления. В этом случае противовес 7 начинает свое перемещение из того положения, в котором он находится в
зависимости от взаимного угла поворота в плане стрелы 5 и консоли 6.
Кроме того, в случае появления резонансных колебаний верхнего строения экскаватора в процессе отработки забоя, перемещая противовес по консоли с помощью ручного командоаппарата, можно менять собственную частоту колебаний верхнего строения мащины и уходить из области резонансных колебаний. Во Бремя ремонта мащины в случае опирания роторной стрелы 3 на опору с помощью ручного командоаппарат.а противовес 7 устанавливается в крайнее, ближнее к оси поворота машины положение.
Предмет изобретения
Роторный экскаватор, включающий ходовую часть, поворотный круг, рабочий орган с ротором и роторной стрелой, разгрузочную стрелу с механизмом новорота и консоль противовеса с расположенным на ней подвижным противовесом, отличающийся тем, что, с целью упрощения расчетной схемы и уменьшения веса экскаватора, подвижной противовес выполнен в виде тележки со смонтированными
в направляющих, закрепленных внутри консоли противовеса, катками, на которой установлена тяговая лебедка, соединяющая посредством тяговых канатов, пропущенных через щарнирно смонтированные на подвижном
противовесе балансирные коромысла и жестко закрепленные на консоли блоки, тележку подвижного противовеса с консолью, причем тяговая лебедка совместно с механизмом поворота разгрузочной стрелы включена в электрическую сельсинную цепь.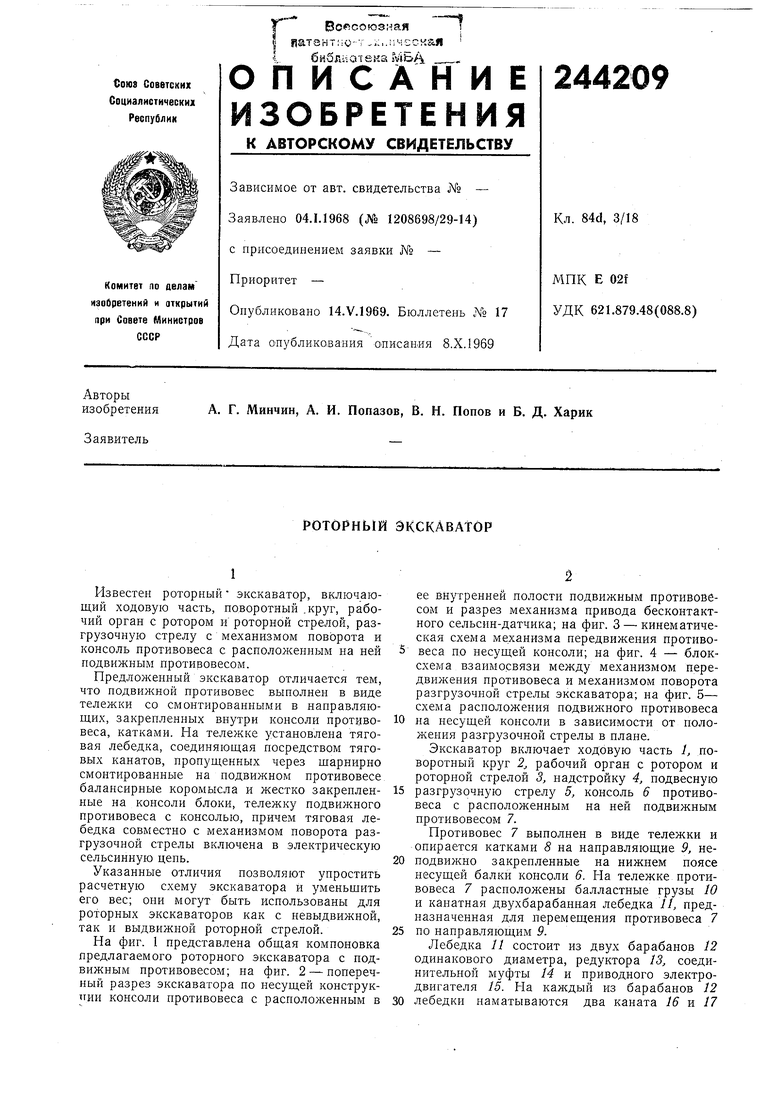
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный экскаватор | 1980 |
|
SU956694A1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| МЕХАНИЗМ ВЫДВИЖЕНИЯРОТОРНОГО | 1969 |
|
SU239129A1 |
| ЭКСКАВАТОР-ДРАГЛАЙН | 2000 |
|
RU2186909C1 |
| Самоходный конвейерный перегружатель | 1977 |
|
SU693020A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 2002 |
|
RU2209761C1 |
| Погрузочно-разгрузочный комплекс кольцевогоСКлАдА | 1977 |
|
SU827349A1 |
| НАДСТРОЙКА РОТОРНОГО ЭКСКАВАТОРА | 1972 |
|
SU428062A1 |
| РАЗГРУЗОЧНОЕ УСТРОЙСТВО РОТОРНОГО ЭКСКАВАТОРА | 1968 |
|
SU212833A1 |
| Роторный экскаватор | 1987 |
|
SU1530678A1 |