1
(21)4278226/29-03
(22)06.07.87
(46) 23.12.89. Бюл. 47
(71)Государственный научно-исследовательский , проектно-конструкторский и проектный институт угольной промышленности СССР Укрниипроект и Произ водственное объединение ЗКдановтяж- маш
(72)Л.П.Ивкин, В.К.Фабишевский-, В.К.Трофимов, В.М.Владимиров, Л.Г.Дубинский и Д.К.Гришин
(53) 621.879.48(088.8) (56) Авторское свидетельство СССР # 157282, кл. Е 02 F 3/18, 1962. Авторское свидетельство СССР 1138460, кл. Е 02 F 3/18, 1983.
(54) РОТОРНЫЙ ЭКСКАВАТОР (57) Изобретение относится к землеройным машинам и предназначено для экскавации и транспортирования горной массы. Цель - повышение надежности работы за счет симметричного нагружения поворотной платформы. Для этого защитный механизм размещен на верхнем строении, связан со стрелой ротора и выполнен из установленных на верхнем строении направлякхцих 14 с размещенным в них пакетом грузов 8, связанных с канатом 10 поли- спастной системы посредством неподвижного 11 и подвижного 12 упоров с размещенньм между ними упругим элементом 9. Полиспастная система имеет
. 15
i
(Л
два ряда блоков 15 и 16. Блок 15 установлен на стреле ротора подвижно, а блок 16 жестко связан с верхним строением. Взаимосвязь оснЬвных параметров защитного механизма определяется исходя из,условия обеспечения допустимого выбега равнодействующих
гзнешиих сил. При необходимости изменения уровней настройки защитного устр-ва предусматривается возможность изменения массы пакета грузов 8 и силы предварительного поджатия упругого элемента 9. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный экскаватор | 1986 |
|
SU1416613A1 |
| Роторный экскаватор | 1983 |
|
SU1138460A1 |
| Роторный экскаватор | 1987 |
|
SU1447986A1 |
| Устройство для подвески стрелы рабочего органа роторного экскаватора | 1982 |
|
SU1087622A1 |
| ПОЛИСПАСТНАЯ ПОДВЕСКА С НЕЗАВИСИМЫМИ КАНАТАМИ СТРЕЛЫ РОТОРНОГО ЭКСКАВАТОРА | 1965 |
|
SU215103A1 |
| Экскаватор-драглайн | 1990 |
|
SU1728394A1 |
| Рабочее оборудование одноковшового экскаватора | 2022 |
|
RU2779865C1 |
| Кабина машиниста экскаватора | 1980 |
|
SU947309A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
Изобретение относится к землеройным машинам и предназначено для экскавации и транспортирования горной массы. Цель - повышение надежности работы за счет симметричного нагружения поворотной платформы. Для этого защитный механизм размещен на верхнем строении, связан со стрелой ротора и выполнен из установленных на верхнем строении направляющих 14 с размещенным в них пакетом грузов 8, связанных с канатом 10 полиспастной системы посредством неподвижного 11 и подвижного 12 упоров с размещенным между ними упругим элементом 9. Полистпастная система имеет два ряда блоков 15 и 16. Блок 15 установлен на стреле ротора подвижно, а блок 16 жестко связан с верхним строением. Взаимосвязь основных параметров защитного механизма определяется исходя из условия обеспечения допустимого выбега равнодействующих внешних сил. При необходимости изменения уровней настройки защитного устройства предусматривается возможность изменения массы пакета грузов 8 и силы предварительного поджатия упругого элемента 9. 3 ил.
Изобретение относится к землеройным машинам, предназначенным для экскавации и транспортирования горно массы.
Целью изобретения является повышение надежности работы за счет симметричного нагружения поворотной платформы.
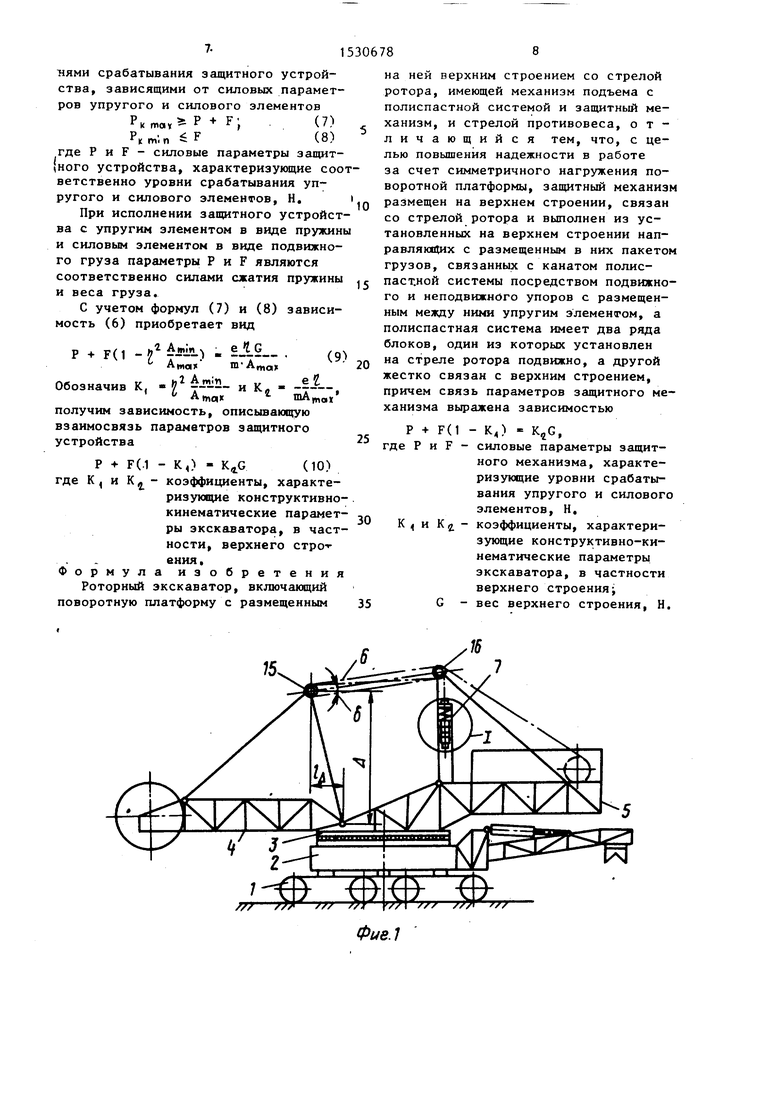
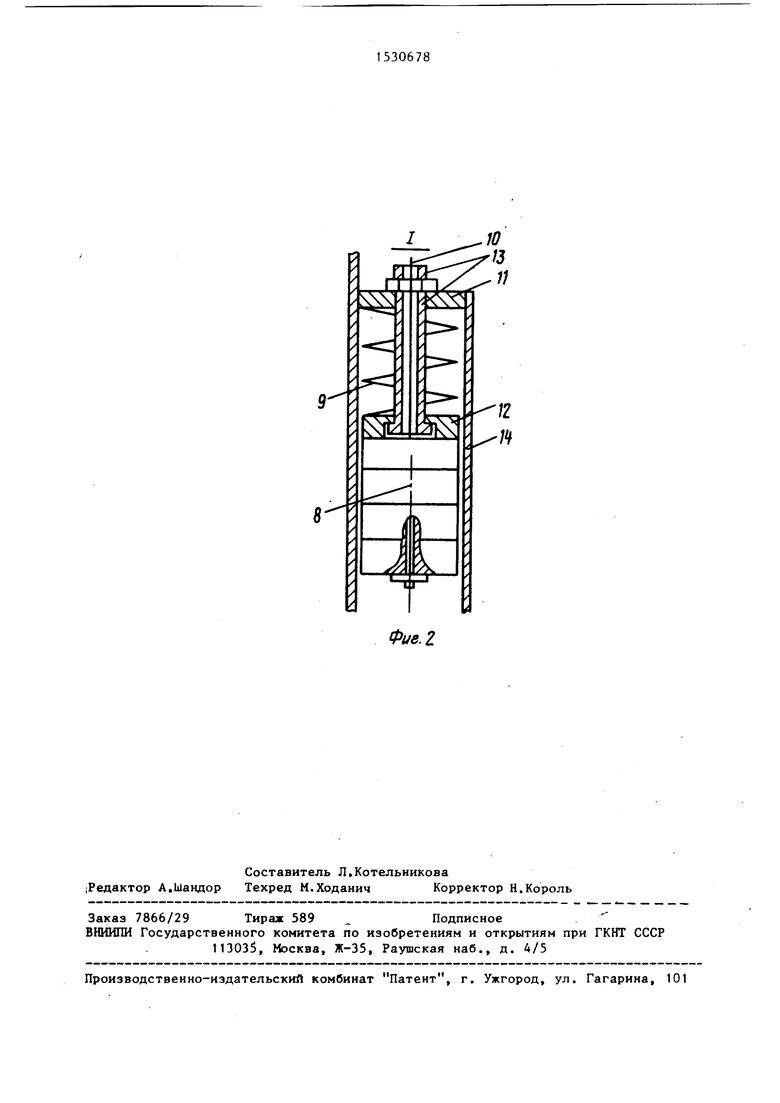
На фиг. 1 изображен экскаватор, общий вид; на фиг, 2 - узел I на фиг. йа фиг. 3 - кинематическая схема подвески стрелы ротора.
Экскаватор включает ходовое оборудование 1, нижнюю раму 2, поворотную платформу 3 с верхним строением, имеющим стрелу 4 ротора, консоль противовеса 5, полиспастную подвеску 6 механизма подъема стрелы ротора и защитный механизм 7, выполненный в виде силового механизма, например, пакета грузов 8. Защитный механизм посредством упругого элемента 9, например, пружинного типа и каната 10 через полиспастную подвеску 6 соединен со стрелой 4 ротора. Конструктивно защитный механизм состоит из пакета грузов 8, подвешенных на сво- бодном конце каната 10 полиспастной подвески 6 и упругого элемента 9, в общем случае предварительно сжатого и расположенного между верхним неподвижным 11 и нижним подвижным 12 упорами, соединенными между собой втулкой 13. При этом канат 10 проходит внутри втулки 13 и пакета грузов 8. Защитный механизм имеет неподвижные направляющие 14.
Кинематически привод подъема и опускания стрелы ротора состоит из полиспастной подвески 6 с двумя рядми блоков, подвижные блоки 15 которой соединены со стрелой 4 ротора, а неподвижные блоки 16 расположены на верхнем строении. При этом один конец каната 10 закреплен на барабане лебедки привода 17 подъема, при
5
5
0
5
Q Q
5
0
5
водимом в движение через редуктор 18 двигателем 19.
Защитный механизм 7 может быть расположен в любом месте верхнего строения (например, на консоли противовеса 5) .
Роторный экскаватор работает следующим образом.
При экскавации горных пород нагрузка на рабочем оборудовании и, соответственно, опрокидывающий момент от этой нагрузки и веса стрелы ротора могут изменяться в широком диапазоне в зависимости от крепости разрабатьшаемых пород, вида стружки и угла наклона стрелы ротора. Уравновешивание машины обеспечивается удерживаю1дим моментом, создаваемым консолью противовеса 5. Учитьтая, что опрокидывающий момент является переменным, а удерживающий - постоянным, вертикальная равнодействующая внешних сил, воспринимаемая поворотной платформой 3, изменяет свое положение относительно оси поворота верхнего строения.
В номинальных режимах работы, когда опрокидывающий момент изменяется в допустимых пределах, нагрузка в ветви каната 10 изменяется в пределах зоны нечувствительности защитного механизма 7, обусловленной сочетанием его силовьк параметров (веса грузов 8 и сжатия упругого элемента 9). При этом защитное устройство Выполняет функции жесткой заделки канатов.
В экстремальных режимах работы например, при экскавации крепких сложноструктурных забоев, может воз- существенное превышение опрокидывающего момента над удерживающим, что приведет к недопустимому выбегу равнодействующей внешних сил вперед относительно оси поворотаi При опускании ротора на забой существенное превышение может возникнуть в удер
живающем моменте по сраннению с опрокидывающим, а равнодействующая недопустимо сместится назад от оси поворота.
При увеличении опрокидывающего момента происходит увеличение силы в полиспастной подвеске 6 и соответственно в каждой ветви каната 10, Превьшение силы, действуклцей в последней ветви каната, суммы противодействующих сил (веса грузов 8 и сжатия упругого элемента 9) обусловливает подъем грузов 8, которые, перемещаясь вверх и воздействуя на упор 12, сжимают упругий элемент 9. При перемещении вверх упора 12 посредством конечного выключателя отклчаются приводы механизмов поворота верхнего строения и подъема стрелы ротора, нагрузка на ротор уменьшается, тем самым равновесие машины восстанавливается.
При уменьшении опрокидывающего момента уменьшается сила, действующая в последней ветви каната 10. Ее уменьшение ниже минимальной суммы противодействующих сил, равной весу грузов 8, ведет к перемещению последних в направляющих 14. В результате вытягивается канат 10 и через полиспастную подвеску 6 поднимается стрела 4 ротора, а ротор выводится из контакта с забоем. Максимальное перемещение пакета грузов В вниз ограничивается конечным выключателем, который отключает привод поворота верхнего строения и включает подъемную лебедку на подъем стрелы ротора. Уравновешенность экскаватора восстанавливается.
При необходимости изменения уровней настройки защитного устройства (или зоны его нечувствительности) предусматривается возможность изменения веса пакета грузов 8 и силы предварительного поджатия упругого элемента 9.
Взаимосвязь основных параметров защитного механизма определяется исходя из условия обеспечения допустимого выбега равнодействующей внешних сил, который определяется зависимостью
g .. ,f)
G
где М.
ро moot максимальный
и М рд ;„ - соответственно и минимальный опрокидывающие моменты, создаваемые рабочим оборудованием с учетом его веса и сил копания Н-м;
G - вес верхней поворотной части экскаватора, Н.
Исходя из условия равновесия роторной стрелы, сила в полиспастной подвеске определяется зависимостью
I n
( t ctl S Join s
(2)
где i и Л
координаты крепления подвижных .блоков полиспастной подвески, м;
угол наклона полиспастной подвески, изменяющийся в зависимости от угла наклона стрелы ротора, град.
Обозначая в равенстве (2) (1 + + )ain5 А, получаем АР . Учитывая кратность полиспаста га,
сила в полиспастной подвеске Р может быть выражена через силу в последней
ветви каната Р зависимостью
РП
тР к (без учета КПД полиспастной подвески).
Тогда опрокидывающий момент, создаваемый рабочим оборудованием, определяется формулой
РО
А- га-Рц , Н. га
(3)
Соответственно максимальный и минимальный моменты с учетом КПД полиспаста определяются по зависимос40
(4)
(5)
величины А, соответствующие режимам нагру- жения, создающим максимальный и минимальный опрокидьшающие моменты;
РКП,О, и Р. fv . n - силы в одной ветви каната при максимальном и минимальном опрокидьшающих моментах.
Тогда зависимость (1) может быть представлена в виде
J m J Р к т JI - А jjij,; m J РК
г
откуда
55
,- А.
р...(б
max It fna
С другой стороны величины сил Р д, и Рц rY,;n определяются уроввями срабатывания защитного устройства, зависящими от силовых параметров упругого и силового элементов
р,о..р + F; (7)
р. m.n F(8)
где Р и F - силовые параметры защит- (ного устройства, характеризующие соответственно уровни срабатывания упругого и силового элементов, Н,
При исполнении защитного устройства с упругим элементом в виде пружины и силовым элементом в виде подвижного груза параметры Р и F являются соответственно силами сжатия пружины и веса груза.
С учетом формул (7) и (8) зависимость (6) приобретает вид
Р -н
F(i ) . . .
Амах m-Ama
Обозначив к,
йчах 2 А
moix и К,
(9)
еЧ
Атак niAp,aix получим зависимость, описывающую взаимосвязь параметров защитного устройства
Р F(.1 - К,) - (10) где К, и К - коэффициенты, характе- ризуюцие конструктивно- кинематические параметры экскаватора, в частности, верхнего строения,
Формула изобретения
Роторный экскаватор, включающий поворотную платформу с размещенным
75
на ней верхним строением со стрелой ротора, имеющей механизм подъема с полиспастной системой и защитный механизм, и стрелой противовеса, отличающийся тем, что, с целью повышения надежности в работе за счет симметричного нагружения поворотной платформы, защитный механизм размещен на верхнем строении, связан со стрелой ротора и выполнен из установленных на верхнем строении нап- равлякхЦих с размещенным в них пакетом грузов, связанных с канатом полис- паст.ной системы посредством подвижного и неподвижного упоров с размещенным между ними упругим элементом, а полиспастная система имеет два ряда блоков, один из которых установлен на стреле ротора подвижно, а другой жестко связан с верхним строением, причем связь параметров защитного механизма выражена зависимостью
Р + Р(1 - К,) « K,G,
где Р и F - силовые параметры защитного механизма, характеризующие уровни срабатывания упругого и силового элементов, Н.
К и Kj - коэффициенты, характеризующие конструктивно-кинематические параметры экскаватора, в частности верхнего строения; G - вес верхнего строения, Н.
Фи8.7
S
12 -Щ
Фиг. 2
