Известен датчик отклонения горнопроходческой машины в плане, измерительный элемент которого выполнен в виде бегущего замкнутого звена.
Предлагаемый датчик отличается от известного тем, что рабочий элемент его выпол- . нен в виде подвижной каретки на двух опорных катках с роликом, установленным в вилке, проходящей через втулку рычага каретки и жестко соединенной с поводком, поворачивающим вилку ролика вокруг вертикальной оси. Это позволяет непосредственно измерять отклонение контролируемой точки машины в плане.
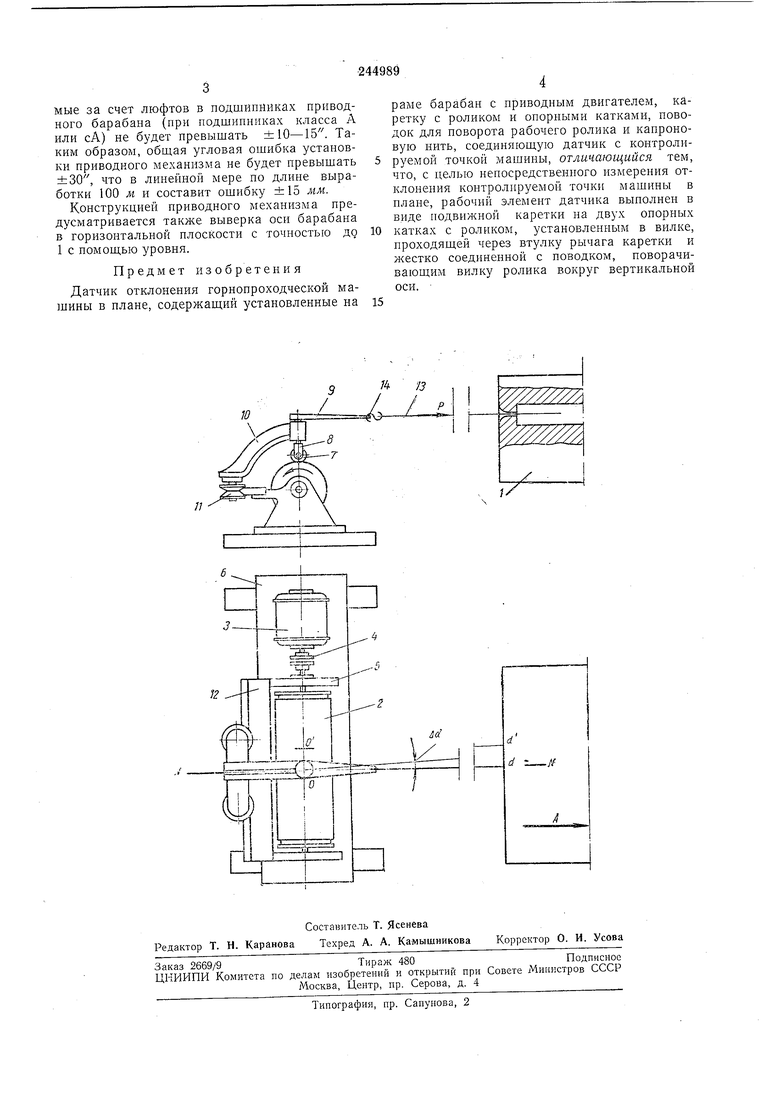
Па чертеже показана принципиальная схема описываемого датчика, где цифрами и буквами обозначены: 1 - корпус комбайна (объект регулирования); 2 - цилиндр (барабан); 3 - двигатель; 4 - муфта; 5 - опора подшипника; 6 - рама; 7 - ролик; 8 - вилка ролика; 9 - поводок; 10 - каретка; 11 - каток каретки; 12 - опорная призма каретки; 13 - капроновая нить; 14 - соединительное звено; Р - сила натяжения нити; d - контролируемая точка; Да - угол отклонения нити относительно линий задания NN. Стрелка А указывает направление движения машины.
ся это с помощью механизма, устанавливаемого на машине, который в зависимости от изменения усилия разматывает бобину, на которой намотана нить.
В случае смещения контролируемой точки в ту или другую сторону относительно линии задания, например в точку d, как показано на чертеже, нить установится под некоторым углом Да относительно линии задания Л Л , в
результате чего на такой же угол Да повернется и ось ролика 7 относительно продольной оси барабана 2.
Пенараллельность осей ролика и барабана вызовет возникновение боковой составляющей
скорости и усилия на ролике, в результате чего каретка 10 начнет перемещаться но опорной призме 12 в сторону компенсации угла Да. Это перемещение будет протекать до тех пор, пока угол Да не станет близким
к нулю. Таким образом, процесс перемещения каретки будет протекать до тех пор, пока величина 001 перемещения каретки не приравняется величине аа смещения контролируемой точки а.
Точность ориентации оси барабана 2 определяется точностью отсчета теодолита, с помощью которого производится выверка установки приводного устройства. Современные горные теодолиты позволяют выполнить эту
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КУРСА ПРОХОДЧЕСКОГО КОМБАЙНАессооюгнАЯ^0тшгг;гкдйг 'Л-' | 1970 |
|
SU281354A1 |
| Устройство для размотки нитевидного материала | 1990 |
|
SU1729983A1 |
| Устройство управления механизмом выправки путевой машины | 1978 |
|
SU773177A1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| Устройство для измерения поперечных отклонений точек объектов | 1983 |
|
SU1154528A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАРЬЕРНОГО ЭКСКАВАТОРА В ПРОСТРАНСТВЕ | 1972 |
|
SU336400A1 |
| МАШИНА ДЛЯ НЕПРЕРЫВНОЙ НАМОТКИ НИТИ | 1989 |
|
RU2037460C1 |
| ТЕОДОЛИТ ДЛЯ ЗАДАНИЯ НАКЛОННЫХ ПЛОСКОСТЕЙ | 2002 |
|
RU2230292C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2009 |
|
RU2430332C2 |
