Изобретение относится к области автоматизации производственных ироцесеов на открытых горных -разработках.
Известно устройство для оиределения лоложения ;карьериого Э:какаватора в ;пространстне, например, вьшолненное с блоками для задания онориой линии и вертикальной опорной плоскости, параллельных заданной траектории дв-ижения экскаватора.
С целью определения абсолютных значений координат экскаватора в цространстве устройство выполнено с блоком определения углов иродольного и паперечного наклонов экакаватора, соединенным с блоками определения а5с.цИ1СС з1, ординаты :И а ппликаты подвижной системы координат, последние нз которых связаны с блоком определения отклонения контролируемых точек относительно опорной линии, а первый соединен с датчиком определения расстояния от экскаватора до начала неподвижной )Системы (координат п с блакО|М определения угла рыскания экскаватора.
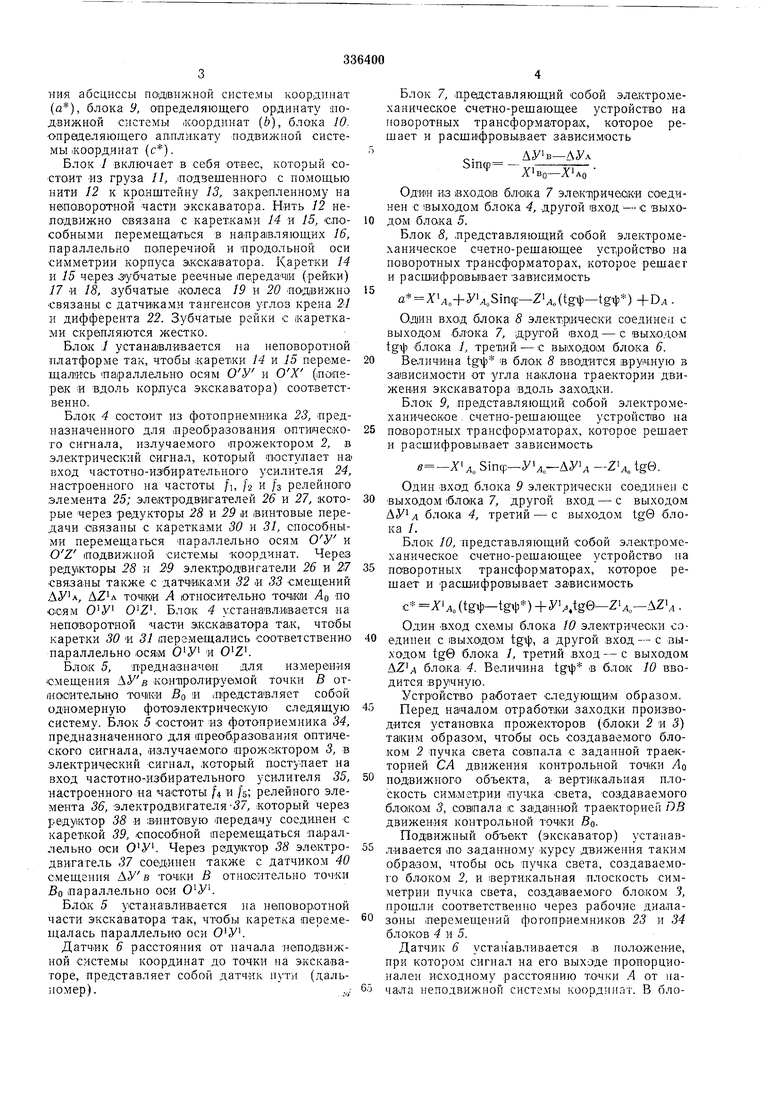
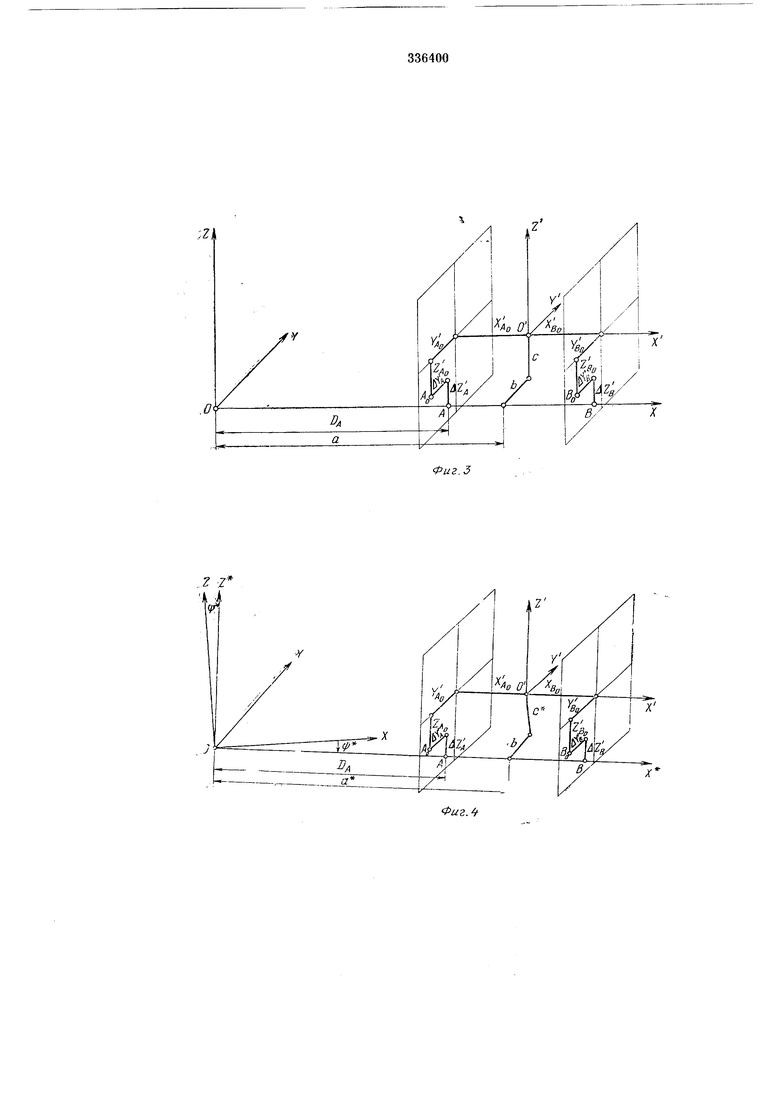
Иа фиг. .1 изображена бла; -схема устройства; на фиг. 2-электромеханическая схема блока для определения углов продольного и поперечного наклонов экскаватора; на фиг. 3-взаимосвязь подвижной системы координат и неподвижной яри задании траектории движения экскаватора в горизонтальной рлоскости; на фиг. 4 - то же при задании
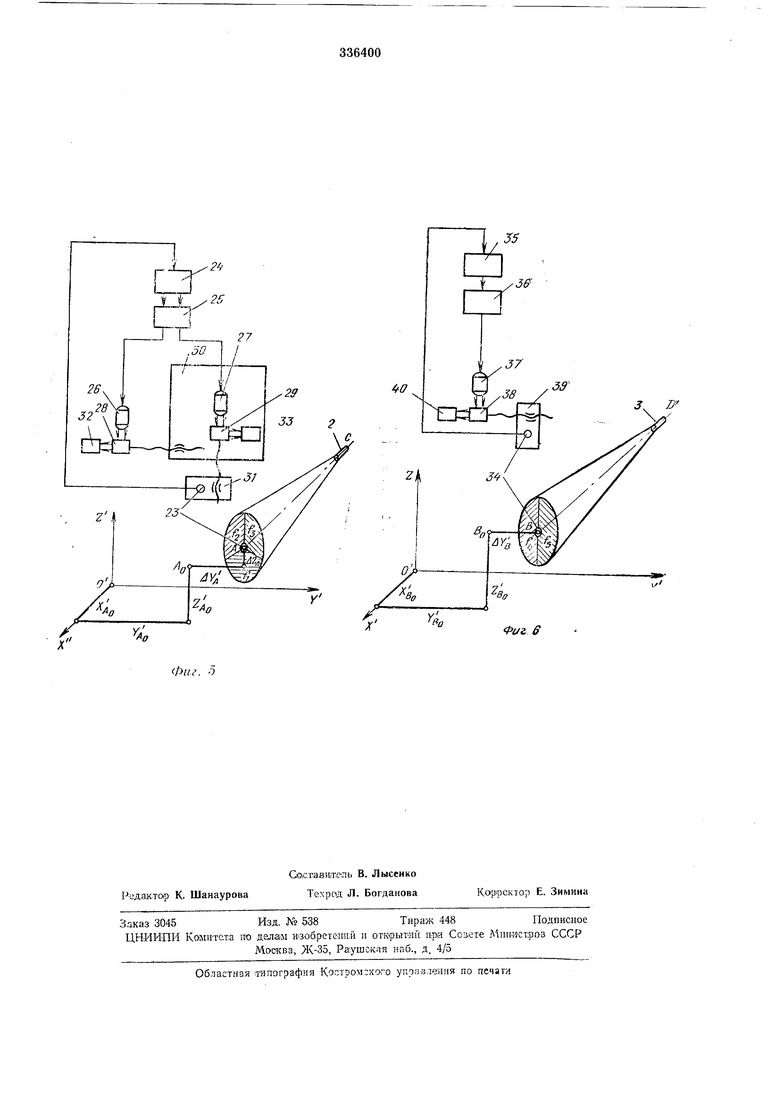
траектории движен-ия экскаватора в плоскости, наклонной вдоль заходки; на фиг. 5 - электромеханическая схема блока для определения смещения контролируемой точки, фшссируемо в подвижной системе координат относительно опорной ЛИНИЙ, на фиг. 6--электромеханическая схема блока для определения смещения другой контролируемой точки относительно опорной плоскости.
Устройство состоит .из блока 1 для определения углов продольного наклона (дифферента) и поперечного наклона (крена) экскаватора, блока 2 (прожектора), задающего апор:1)ю линию на гра1Ш1це частей светового пуч.ка, модулированных частотами /ь fz и /з, блока 3 (прожектора), задающего опорную плоскость на частей светового пучка, модулированных частотами /4 и /з, блока 4 (см. фиг. 5) для определения смещения контролируемой точки, фиксируемой в подвижной системе iKOординат относительно опорной .пннии (точка .4о относительно опорной линии по оси 7 ОУ и OZ), блока 5 (см. ;фпг. 6) для определения смещения другой 1КО1ггролируемой точки относительно опорной плоскости (точка BO относительно опорной плоскости по оси ОУ), датчика 6 определения расстояния от экскаватора до начала пенодвижной системы координат, блока 7 определения угла рыскания экскаватора () блока S для определения аосциссы падвилуной системы координат (а), блока Я ооределяющего ординату подвижной системы координат (Ь), блока 10, определяющего апплнкату подвнжной системы -координат (с).
Блок 1 включает в себя отвес, который состоит из груза 11, (Подвешенного с помощью нити 12 к кронштейну 13, закрепленному на неооворотной части экскаватора. Нить 12 неподвижно связана с каретками 14 и 15, способными перемещаться в напра1вляющих 16, параллельно полеречной и продольной оси симметрии корпуса акскаватора. Каретки 14 и 15 через зубчатые реечные лередатаи (рейки) 17 и 18, зубчатые колеса 19 и 20 лодвижно связаны с датчиками тангенсов углов крена 21 и дифферента 22. Зубчатые рейки с каретками скрепляются жестко.
Блок 1 устанавливается на неповоротной платформе так, чтобы каретки 14 и 15 перемещались параллельно осям ОУ и О Х (лоперек и вдоль корпуса экскаватора) соответственно.
Блок 4 состоит из фотоприемника 23, предназначенного для .преобразования олтИ1чес1КОго сигнала, излучаемого лрожектором 2, в электрический сигнал, который поступает на вход частотно-избирательного усилителя 24, настроенного на частоты /ь г и /з релейного элемента 25; электродвигателей 26 и 27, которые через редукторы 28 vi 29 т .винтовые передачи связаны с каретками 30 и 31, способными перемеш.аться параллельно осям ОУ и OZ подвижной системы координат. Через редукторы 28 и 29 электродвигатели 26 и 27 связаны также с датчика ми 32 и 33 смещений ДУл, AZA точки А относительно точии АО по осям ОУ OZ. Блок 4 устанавливается на неповоротной части экскаватора так, чтобы каретки 30 и 31 (пер гмещались соответственно параллельно осям ОУ л OZ.
Бло1К 5, лреднавпачон для измерен ия (Смещения ДУв кант1ролируемой точки В отлшсителыно точки Во и представляет собой одномерную фотоэлектрическую следящую систему. Блок 5 состоит из фотолриемника 34, предназначенлого для (преобразо1вания оптического сигнала, излучаемого прожектором 3, в электрический сигнал, который поступает иа вход частотно-избирательного усилителя 35, настроенного на частоты /4 и /s; релейного элемента 36, электродвигателя -37, который через ре дуктор 38 и в интовую передачу соединен с кареткой 39, способной перемещаться параллельно оси ОУ. Через редуктор 38 электродвигатель 37 соединен таклсе с датчиком 40 смещения ДУв точ1ки В относительно точки Во параллельно оси ОУ.
Блок 5 устанавливается па неповоротной части экскаватора так, чтобы каретка перемещалась параллельно оси ОУ.
Датчик 6 расстояния от пачала неподвижной системы координат до точки на экскаваторе, представляет собой пути (дальномер).
Блок 7, представляющий собой электромеханическое счетно-решающее устройство на новоротных трансформаторах, которое решает и расшифровььвает зависимость
„. ДУв-ДУ 5шф - -- .
лBO-лАО
Один из входов блока 7 элект|риче|аки соединен с выходом 4, другой вход - с выхо0 блока 5.
Блок 8, лредставляюший собой электромеханическое счетно-решающее устройство на поворотных трансформаторах, которое решает и расшифровывает зависимость
а ;Сл„+Ул„51пф-ZлЛtgl -tgяl) +D.4 .
Один вход блока 8 электрически соединеа с выходом блока 7, другой вход - с выходо м блока 1, трений - с выхадом блока 6.
0 Величина tgij) в блок 8 в-водится вручную в зависимости от угла траектории движения экскаватора вдоль заходки.
Блок 9, представляющий собой электромеханическое . счетно-решающее устройство на
5 паворотных трансфор маторах, которое решает и расшифро вывает зависимость
й -Хл„ 51пф-Ул-ДУл -Zл„ tg0.
Один вход блока 9 электрически соединен с 0 выходом блока 7, другой вход -с выходом ДУл блока 4, третий - с выхо-дом tg8 блока /.
Блок 10, представляющий собой электромеханическое счетно-решающее устройство на 5 поворотных трансформаторах, которое рещает и расшифровывает зависи мость
с л, (tgil)-tgil)) +Ул.tge-Z л„-ДZл .
Один вход схемы блока 10 эле ктрически соединен с выходом tgt|j, а другой вход -- с выходом tg0 блока /, третий вход - с выходом ДZл блока 4. Величина tgij) в блок 10 вводится вручную.
Устройство работает следующи-м образом.
5 Перед началом отработки заходки производится установка прожекторов (блоки 2 и 3) таким образоМ, чтобы ось создаваемого блоком 2 лучка света совпала с заданной траекторией СА движения контрольной точки Ло
0 подвижного объекта, а вертикальная плоскость сим1М гтрии пучка света, создаваемого блоко1М 5, совпала с заданной трае1кторией DB движения контрольной точки Во.
Подвижный объект (экскаватор) устанавливается по заданному курсу движения таким образом, чтобы ось пучка света, создаваемого блоком 2, и вертикальная плоскость симметрии пучка света, создаваемого блочком 3, прошли соответственно через рабочие диала0 зоны перемещений фогоприемников 23 и 34 блоков 4 и 5.
Датчик 6 устанавливается в пол ожение, при котором сигнал на его пропорционален исходному расстоянию А от iraки 8 и Р вручную вводится величина, пропорциональная . После этого предлагаемое устройство ВВОДИТся В действие. При отклонении экскаватора от заданной траектории движения (в общем случае по шести степеням овободы) лроизойдет следующее:В 1 под действием груза 11 нить смеСТИТ1СЯ отно1сителвно нуЛ(евог:0 положевия и передвинет по направляющи параллельно осям ОУ и OZ соответственно каретки 14 и 15, которые через рееч,ные передачи (рейка 17 и зубчатое колесо 19, рейка 18 и зубчатое колесо 20) повернут датчики 21 и 22, что вызовет па их выходах появление сигналоВ, еропорциональных тангенсам углов поперечного и П родольн0:го наклонов экскаватора. В блоке 4 фотоориемпик 23 сместится относительно нулевого положения, в результате чего нарущится равенство кол-ичеств энергии, модулированных частотами /i, /2 и /з и попадающих на фоточувствительиый элемент фотоприемника 23. В зависимости от преобладания .на фоточувствительиом элементе энерГИИ той или иной частоть частотно-избирательный усилитель 24, куда поступает сигнал от фотоприемника 23 через релейный элемент 25 включит электродвигатели 26 :и 27 и в направлениях, необходимых для восстановления состояния равновесия. Электродвигатели 26 и 27 через редукторы 2S и 29 и винтовые .передачи переместят параллельно осям ОУ и соответственно каретки 30 и 31 до совмещения фотоприемника 23 с осью луча СА. Через редукторы 28 н 29 электродвигатели 26 и 27 также повернут в новое положение датчики 32 и 33, что вызовет на их выходах появление сигналов, пропорциональных смещениям АУл и А2л фотоприемника 23 параллельно осям ОУ и OZ отиосительно оси СА. пли, что то же caiMoe, пропорциопальных смеИ1;вния,1м Т0|41ки А отнооительно точки АО параллельно тем же осям. Б блоке 5 фотоприем}1ик 34 сместится относительно нулевого положения, в результате чего нарушится равенство количеств энергии, модулированных частотами f и fs, попадающих иа фоточувствительный элемент фотоприемника 34. В зависимости от преобладания на фоточувствительном элементе энергии той или иной частоты, частотно-избирательный -силител1 35, куда поступает сигнал от фотоп.рнемника 34, через релейный элемент 56 Бключлт электродвигатель 37 в направлений, необходимом для восстановления состояния равновесия. Электродвигатель 37 через редуктор 38 н винтовую передачу переместит параллельно оси О У каретку 39 до совмещения фотоприемника с вертикальной плоскостью, проходящей через ось DB. Через редуктор 38 электродвигатель 37 также повергнет в новое ;1оложепие датчик 40, что вызовет на его выходе появление сигнала, пропорционального смещению АУн фотоприемника 34 параллельно оси ОУ относительно плоскости, или, что то же самое, пропорционального смещению точки В относительно точки Во параллельно оси Oi. Сигналы из блоков /, 4, 5, и 6 поступят на соответствующие входы .блоков 7-10 (счетнорещающие устройства) и вызовут на их выходах появление сигналов, пропорциональ;1ых величинам 81пф, а, в и с. П р е д .м е т изобретения 1.Устройство для определения положения карьерного экскаватора в простраистве, содержащее блоки для задания опорной лини) и вертикальной опорной плоскости, параллельных заданной траектории движения экскаватора, отличающееся тем, что, с целью определения абсолютных значений координат экска.ватора в пространстве, в него введен блок определения углов продольного и поперечного наклонов экска.затора, соединенный с блоками определения абсциссы, ординаты и аппликаты подвижпой системы координат, иоследние из которых связаны с блоком .определения отклонения контролируемы.х точек относительно опорной линии, а первый соединен с датчиком определения расстояния от экскаватора до нача.та неподвижной системы координат и с блоком определения угла рыскания экскаватора. 2.YcTpoiicTBO по п. 1, отличающееся тем, что блок определения углов .про.дольного и поперечного наклонов экскаватора выполнен в виде отвеса, взаимодействующего с каретками, связанными с датчиками их перемещений. 3.Устройство по п. 1, отличающееся тем, что блоки определения отклонения контролируемых точек выполнены с чувствительными элементами, связанными с датчика:ми отклонений.
siri-tp
Фиг /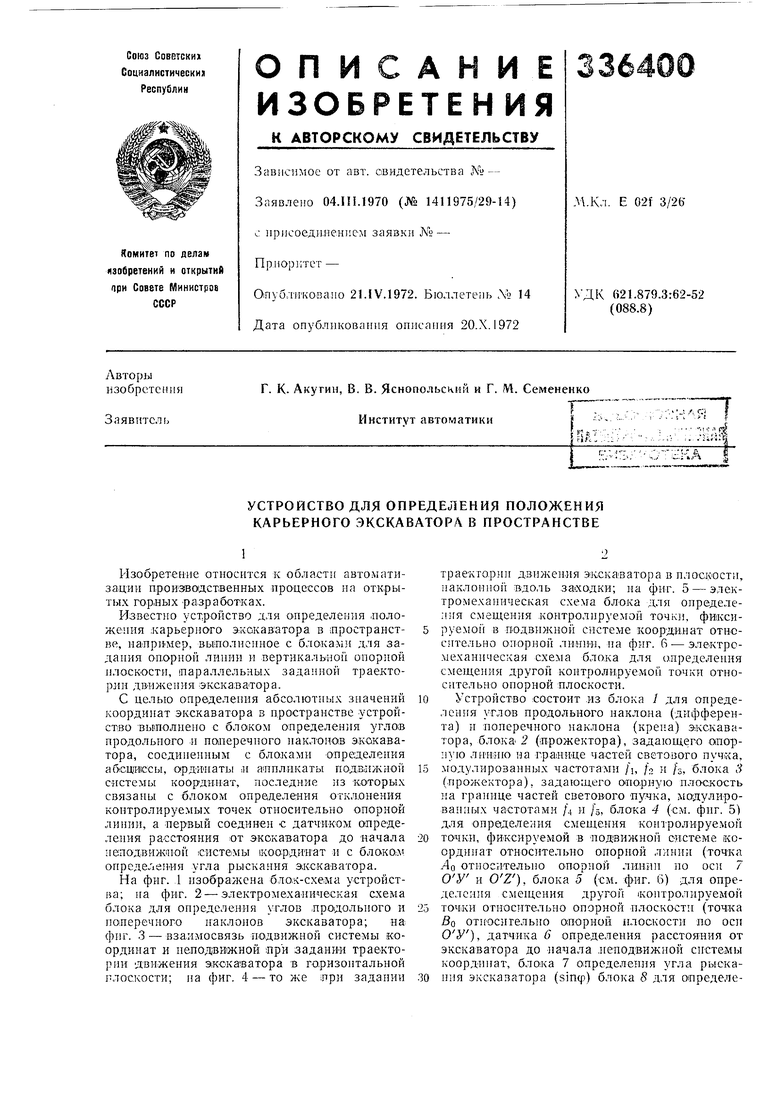
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГО ЩИТА | 1973 |
|
SU388196A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1981 |
|
SU1002180A2 |
| Устройство для градуировки шкал генераторов сигналов | 1982 |
|
SU1080016A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| МНОГОЦЕЛЕВОЙ МНОГОПОЛОСНЫЙ ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТА С ВИДЕОФИКСАЦИЕЙ | 2017 |
|
RU2658120C1 |
| УСТРОЙСТВО для ВВОДА и ВЫВОДА ИЗОБРАЖЕНИЯДЛЯ ЭЦВМ | 1972 |
|
SU341057A1 |
/5
/-
IS
Фиг. о J. D
