Известны грузоподъемные краны, содержагцие ходовую тележку, тягач, поворогную платформу и стреловое оборудование.
Особенностью описываемого краиа является то, что между ходовой тележкой крана и тягачом смонтирован следящий привод, включающий сельсин-датчики, укрепленные на осях поворота тягача и ходовой тележки, и сельсин-приемники, установленные в кабине машиниста, указывающие на разницу поворота тягача и ходовой тележки. Кроме того, тягач соединен с поворотной платформой через телескопические балки, смонтированные в наклонных направляющих, обеспечивающих при их выдвижении изменение высоты центра тяжести тягача.
При таком выполнении крана увеличиваются его маневренность и грузоподъемность.
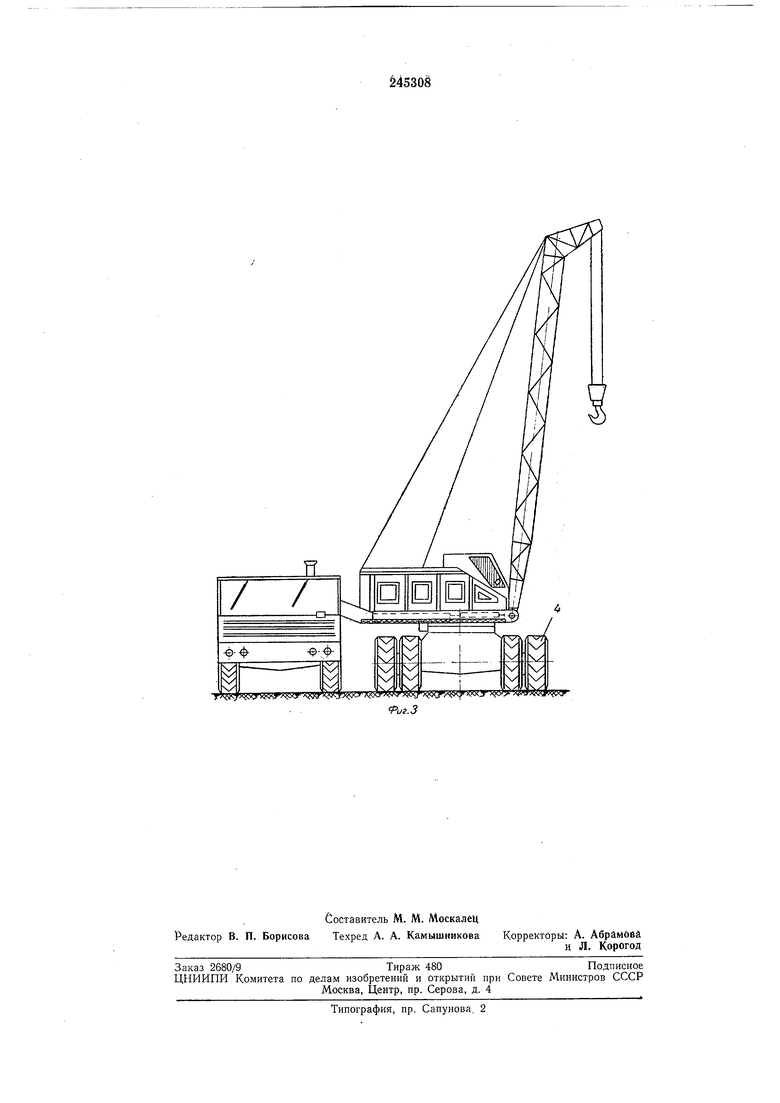
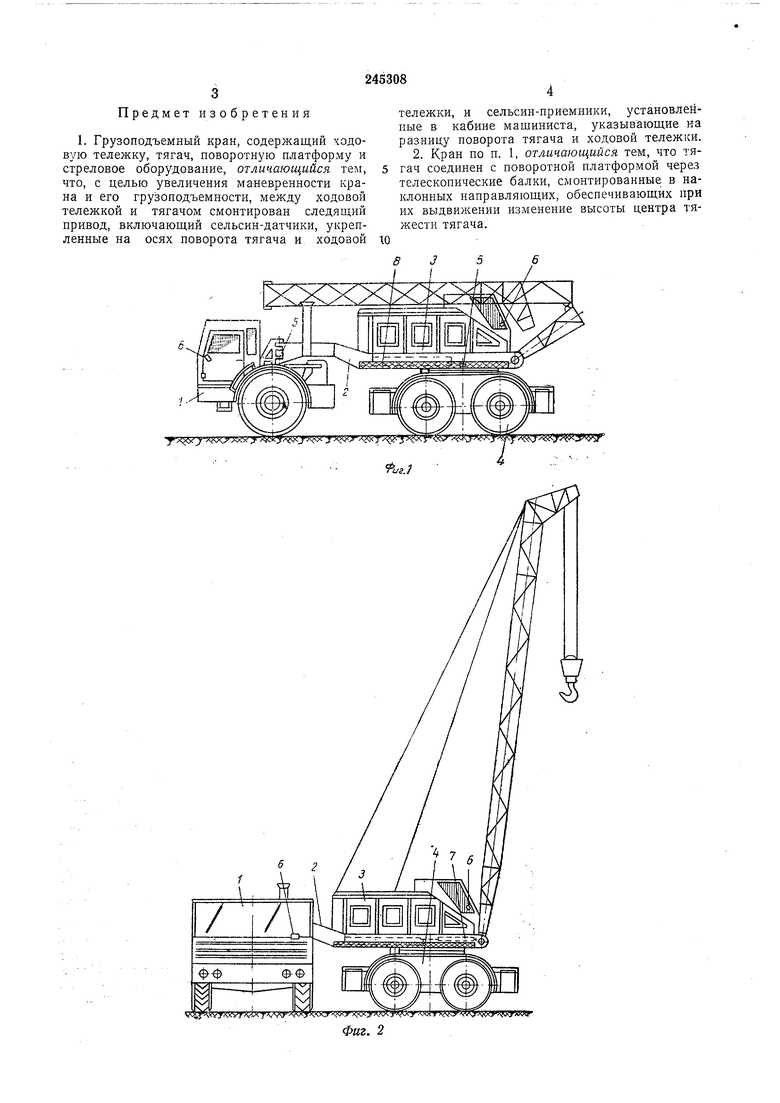
На фиг. 1 изображен предлагаемый кран в транспортном положении; на фиг. 2 - то же, в рабочем положении при развернутом тягаче; на фиг. 3 - то же, в рабочем положении при развернутых тягаче и ходовой тележке.
Грузоподъемный кран состоит из тягача /, телескопических балок 2, поворотной платформы 3, ходовой тележки 4, сельсин-датчиков 5, сельсин-приемников 6 со стрелкой и щкалой и привода 7 телескопических балок.
формы 3 следящий привод разворачивает и ходовую тележку 4. Одновременно с тягачом 1 и ходовой тележкой 4 относительно платформы 3 поворачиваются и роторы сельсиндатчиков 5. Если поворот происходит синхронно, стрелка на шкале сельсин-приемника 6 остается на нулевой отметке. Если при повороте ходовая тележка отстает от тягача, происходит рассогласование углов поворота сельсин-датчиков 5, стрелка сельсин-приемпика 6 отклоняется в сторону от нулевой отметки, и включаются приборы ускорения поворота тележки (на чертеже не показаны).
При работе крана с грузом на крюке тягач
1, соединенный телескопическими балками 2 с поворотной платформой 3, отодвигается от ходовой тележки 4 путем выдвижения тел ескопических балок 2, благодаря чему увеличивается восстанавливающий момент. Кроме
того, выдвижение телескопических балок 2 по наклонным направляющим 8 поворотной платформы 3 обеспечивает отрыв тягача от опорной поверхности, что дает возможность выдвижения балок и при тягаче, развернутом поперек поворотной платформы 3 с помощью специального привода 7, управляемого в функции опрокидывающего момента. Уменьшение маневренности и восстанавливающего момента происходит в обратном порядке. Предмет изобретения 1. Грузоподъемный кран, содержащий ходовую тележку, тягач, поворотную платформу и стреловое оборудование, отличающийся тем, 5 что, с целью увеличения маневренности крана и его грузоподъемности, между ходовой тележкой и тягачом смонтирован следящий привод, включающий сельсин-датчики, укрепленные на осях поворота тягача и ходовой ю
L±znziтележки, и сельсин-приемники, установлей ные в кабине машиниста, указывающие на разницу новорота тягача и ходовой тележки. 2. Кран по п. 1, отличающийся тем, что тягач соединен с поворотной платформой через телескопические балки, смонтированные в наклонных направляющих, обеспечивающих при их выдвижении изменение высоты центра тяжести тягача, 
| название | год | авторы | номер документа |
|---|---|---|---|
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Самоходный грузоподъемный кран | 1990 |
|
SU1776630A1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН, ПРЕИМУЩЕСТВЕННО ДЛЯ ВОССТАНОВИТЕЛЬНЫХ РАБОТ | 1998 |
|
RU2155155C1 |
| Прицепной грузоподъемный кран | 1985 |
|
SU1303542A1 |
| Опорная конструкция крана | 1980 |
|
SU943187A1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2015 |
|
RU2599741C2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| СТРЕЛОВОЙ КРАН | 1992 |
|
RU2026259C1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2012 |
|
RU2495816C1 |
| МОБИЛЬНАЯ ПЕРЕГРУЗОЧНАЯ УСТАНОВКА | 1993 |
|
RU2097305C1 |