Устройство относится к области автоматизации производственных процессов.
Известны релейные следящие системы, содержащие два управляющих реле и два дополнительных резистора, включенных в цепь датчика обратной связи. Однако известные устройства сложны и недостаточно точны.
Предложенное устройство отличается от известных тем, что в нем нормально открытые контакты одного уиравляющего реле подключены параллельно одному из дополнительных резисторов датчика обратной связи, а нормально открытые контакты другого управляющего реле - параллельно второму управляющему резистору.
Это позволяет повысить устойчивость и точность работы следящей системы.
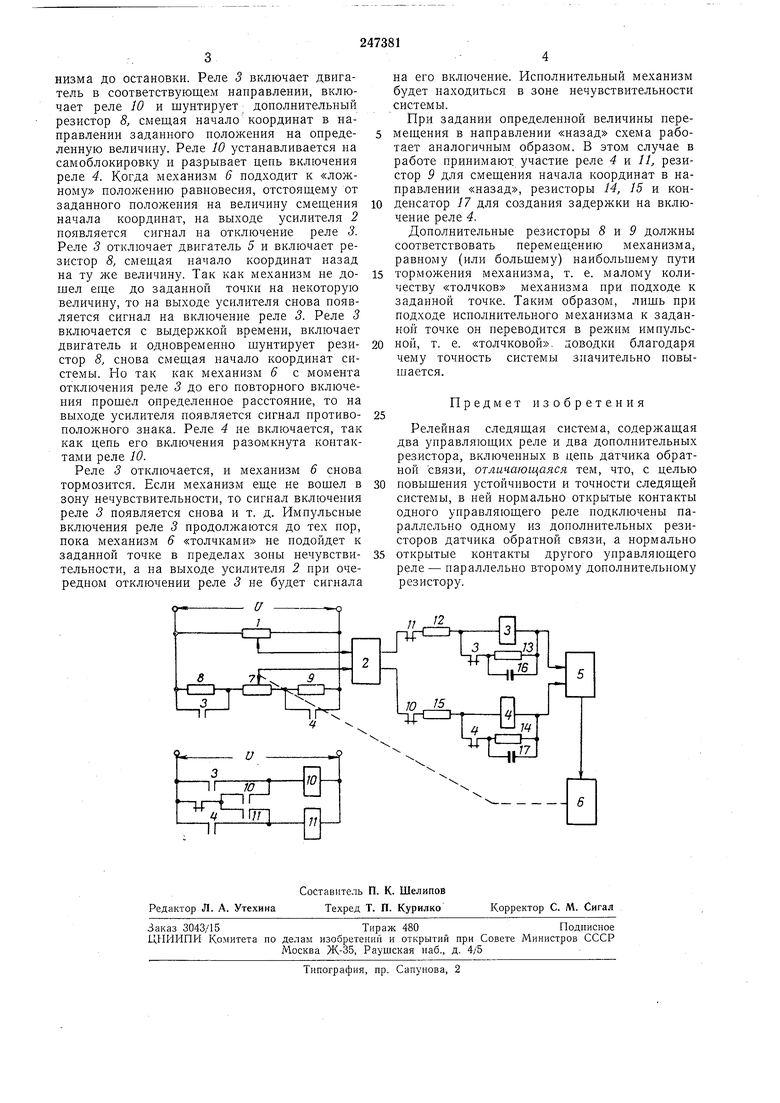
На чертеже показана предложенная следящая система.
Она состоит из задающего устройства 1, усилителя 2 сигнала рассогласования, управляющих реле 3 и 4 для включения двигателя 5 соответственно «вперед и «назад, исполнительного механизма 6 и датчика обратной связи 7. Стабилизирующими элементами являются дополнительные резисторы S и Я защунтированные нормально разомкнутыми контактами реле 3 и 4 и служащие для смещения начала координат системы на определенную величину в прямом и обратном направлениях движения системы; программные реле 10 W. 11 для исключения автоколебаний системы; резисторы 12-15 и конденсаторы 16 и 17, служащие для осуществления задержки на включение управляющих реле.
Устройство работает следующим образом. При задании устройством / оиределенной величины перемещения в направлении «вперед на входе усилителя 2 появляется сигнал
рассогласования, пропорциональный разности положения устройства 1 и датчика обратиой связи 7. Этот сигнал вызывает включение с замедлением реле 3.
Замедление при включении реле 3 происходит следующим образом. В первый момент времени при появлении сигнала конденсатор 16 имеет малое сопротивление, поэтому на нем, как и иа реле, будет малое падение напряжения, а на резисторе 12 - большое падение напряжения. По мере заряда конденсатора его сопротивление увеличивается, и происходит перераспределение напряжения между резистором 12 и конденсатором 16. В определенный момент времени напряжение
на конденсаторе 16 оказывается достаточным для включения реле 3. Реле 3 включается и нормально замкнутыми контактами размыкает цепь заряда. Величина времени замедления подбирается низма до остановки. Реле 3 включает двигатель в соответствующем направлении, включает реле 10 и шунтирует; дополнительный резистор 8, смещая начало координат в направлении заданного положения на оиреде-5 ленную величину. Реле 10 устанавливается па самоблокировку и разрывает цепь включения реле 4. Когда механизм 6 подходит к «ложному положению равновесия, отстоящему от заданного положения на величину смещенияю начала координат, на выходе усилителя 2 появляется сигнал па отключение реле 3. Реле 3 отключает двигатель 5 и включает резистор 8, смещая начало координат назад на ту же величину. Так как механизм не до-15 шел еще до заданной точки на некоторую величину, то на выходе усилителя снова иоявляется сигнал на включение реле 3. Реле 3 включается с выдержкой времени, включает двигатель и одновременно шунтирует рези-20 стор 8, снова смещая иачало координат системы. Но так как механизм 6 с момента отключения реле 3 до его повторного включения прошел определенное расстояние, то на выходе усилителя появляется сигнал противо-25 положного зиака. Реле 4 не включается, так как цепь его включения разомкнута контактами реле 10. Реле 3 отключается, и механизм 6 снова тормозится. Если механизм еще не вошел в30 зону нечувствительности, то сигнал включения реле 3 появляется снова и т. д. Импульсные включения реле 3 продолжаются до тех пор, пока механизм 6 «толчками не подойдет к заданной точке в пределах зоны нечувстви-35 тельности, а на выходе усилителя 2 при очередном отключении реле 3 не будет сигнала на его включение. Исполнительный механизм будет находиться в зоне нечувствительности системы. При задании определенной величины перемещения в направлении «назад схема работает аналогичным образом. В этом случае в работе припимают участие реле 4 и 11, резистор 9 для смещения начала координат в направлении «назад, резисторы 14, 15 и конденсатор 17 для создания задержки на включение реле 4. Дополнительные резисторы 8 и 5 должны соответствовать перемещению механизма, равному {или большему) наибольшему пути торможения механизма, т. е. малому количеству «толчков механизма при подходе к заданной точке. Таким образом, лишь при подходе исполнительного механизма к задайиой точке он переводится в режим импульсной, т. е. «толчковой, доводки благодаря чему точность системы значительно повышается. Предмет изобретения Релейная следящая система, содержащая два управляющих реле и два дополнительных резистора, включенных в цепь датчика обратной связи, отличающаяся тем, что, с целью повышения устойчивости и точности следящей системы, в ней нормально открытые контакты одного управляющего реле подключены параллсльпо одному из дополнительных резисторов датчика обратной связи, а нормально открытые контакты другого управляющего реле - параллельно второму дополнительному резистору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точной остановки подвижного узла | 1976 |
|
SU566711A2 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2042115C1 |
| ЭЛЕКТРОПРИВОД УСТРОЙСТВА ТРАНСПОРТИРОВКИ | 1991 |
|
RU2063343C1 |
| РЕГУЛЯТОР С ПЕРЕКЛЮЧАЕМЫМИ ПАРАМЕТРАМИ | 1969 |
|
SU235135A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1973 |
|
SU377102A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| Двухканальная следящая система | 1984 |
|
SU1241188A1 |
| СПОСОБ ИНДИКАЦИИ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2330770C2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
