1
Изобретение относится к области станкостроения.
По основному авт. св. № 254312 известно устройство для точной установки подвижного узла, перемещаемого исполнительным механизмом с индуктивным датчиком в цепи обратной связи.
Однако это устройство не обеспечивает минимально возможное время позиционирования в следяш,ем режиме, потому что работа привода в следящем режиме вызывает уменьшение скорости и замедления по мере приближения подвижного узла к заданной координате. Постоянный коэффициент усиления фазочувствительного усилителя создает линейную зависимость скорости и замедления от пути. Такой закон изменения скорости и замедления в следящем режиме определяет неравномерно замедленное движение, которое не обеспечивает минимально возможное время позиционирования.
С целью уменьшения времени позиционирования Б предложенном устройстве в качестве фазочувствительного усилителя использован операционный усилитель, между выходом и входом которого параллельно включены резистор и не менее одной цепочки, снабженной встречно-параллельно соединенными нелинейными элементами, например диодами, и последовательно с ними включенным резистором.
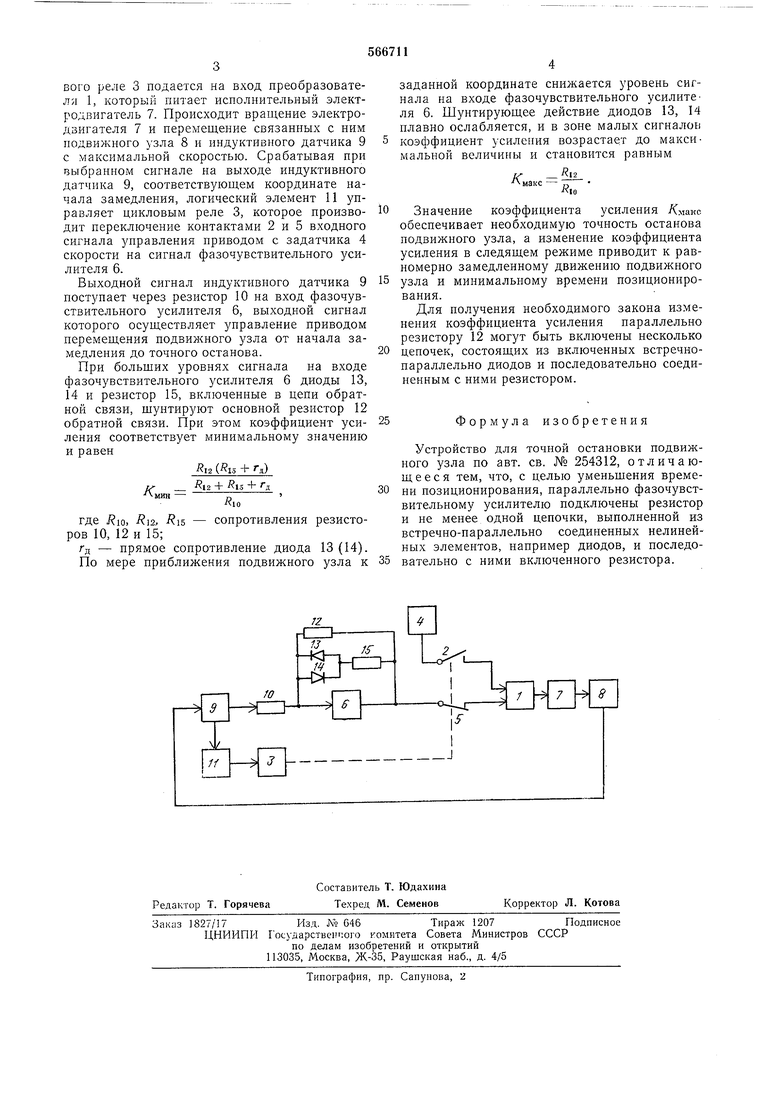
На чертеже дана электрическая схема предложенного устройства.
На вход преобразователя 1 через нормально-открытый контакт 2 циклового реле 3 включен задатчик 4 скорости, а через нормально-закрытый контакт 5 того же реле - выход фазочзвствительного усилителя 6. На
выход преобразователя 1 подключен электродвигатель 7, который связан с подвижным узлом 8, жестко соединенным с индуктивным датчиком 9. Выход датчика 9 нодключен к резистору 10, установленному на входе фазочувствительного усилителя 6, а также на вход логического элемента И. На выход логического элемента 11 подключено цикловое реле 3. Между выходом фазочувствительного усилителя 6 и общей точкой резистора 10 и входа
фазочувствительного усилителя параллельно включены резистор 12 и цепочка, снабженная встречно-параллельно соединенными диодами 13 ,14 и последовательно с последними включенным резистором 15.
Параллельно резистору 12 могут быть включены несколько цепочек, аналогичных описанной.
Устройство работает следующим образом. Напряжение с выхода задатчика 4 скорости
через нормально-открытый контакт 2 циклового реле 3 подается на вход преобразователя 1, который питает исполнительный электродвигатель 7. Происходит вращение электродвигателя 7 и перемещение связанных с ним подвижного узла 8 и индуктивного датчика 9 с максимальной скоростью. Срабатывая при выбранном сигнале на выходе индуктивного датчика 9, соответствующем координате начала замедления, логический элемент 11 управляет цикловым реле 3, которое производит переключение контактами 2 и 5 входного сигнала унравлення приводом с задатчика 4 скорости на сигнал фазочувствительного усилителя 6. Выходной сигнал индуктивного датчика 9 поступает через резистор 10 на вход фазочувствительного усилителя 6, выходной сигнал которого осуществляет управление приводом перемещения подвижного узла от начала замедления до точного останова. При больших уровнях сигнала на входе фазочувствительного усилителя 6 диоды 13, 14 и резистор 15, включенные в цепи обратной связи, щунтируют основной резистор 12 обратной связи. При этом коэффициент усиления соответствует минимальному значению и равен 12 (Ки + Гд) /Г - 12 + 15 + Гд мин -„ где RIO, , Rib сопротивления резисторов 10, 12 и 15; Гд - прямое сопротивление диода 13 (14). По мере приближения подвижного узла к заданной координате снижается уровень сигнала на входе фазочувствительного усилителя 6. Шунтирующее действие диодов 13, 14 плавно ослабляется, и в зоне малых сигналов коэффициент усиления возрастает до максимальной величины и становится равным К - - „ Значение коэффициента усиления /Смаке обеспечивает необходимую точность останова подвижного узла, а изменение коэффициента усиления в следящем режиме приводит к равномерно замедленному движению подвижного узла и минимальному времени позиционирования. Для получения необходимого закона изменения коэффициента усиления параллельно резистору 12 могут быть включены несколько цепочек, состоящих из включенных встречнопараллельно диодов и последовательно соединенным с ними резистором. Формула изобретения Устройство для точной остановки подвижного узла по авт. св. № 254312, отличающееся тем, что, с целью уменьшения времени позиционирования, параллельно фазочувствительному усилителю подключены резистор и не менее одной цепочки, выполненной из встречно-параллельно соединенных нелинейных элементов, например диодов, и последовательно с ними включенного резистора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точной остановки подвижного узла | 1978 |
|
SU719859A2 |
| Система автоматического управления скоростью спуска и подъема колонны бурильных труб | 1987 |
|
SU1476114A1 |
| ВСЕСОЮЗНАЯП ^ УТ jS^j^Sr^ •r'*^iп 4 г.зг 1 iSt; | 1973 |
|
SU389917A1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| Устройство для регулирования облучения | 1988 |
|
SU1612275A1 |
| УСТРОЙСТВО для ТОЧНОЙ ОСТАНОВКИ подвижногоУЗЛА | 1969 |
|
SU254312A1 |
| Устройство для определения и индикации положения подвижного объекта | 1981 |
|
SU999083A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВУХСКОРОСТНОЙ СЛЕДЯЩИЙ ПРИВОД | 1969 |
|
SU233870A1 |
