Известно рабочее оборудование гидравлического экскаватора, содержащее стрелу, рукоять с неподвижной и подвижной частями, ковш и силовые цилиндры управления.
Однако в известном оборудовании поворот на необходимый угол рукояти вместе с челюстями производится вручную, ЧТО в значительной степени производительность маШИНЫ и «е позволяет эффективно использовать ее .пр,и разработке карьеров.
Целью настоящего изобретения является обеспечение принудительного поворота подвижной части рукояти.
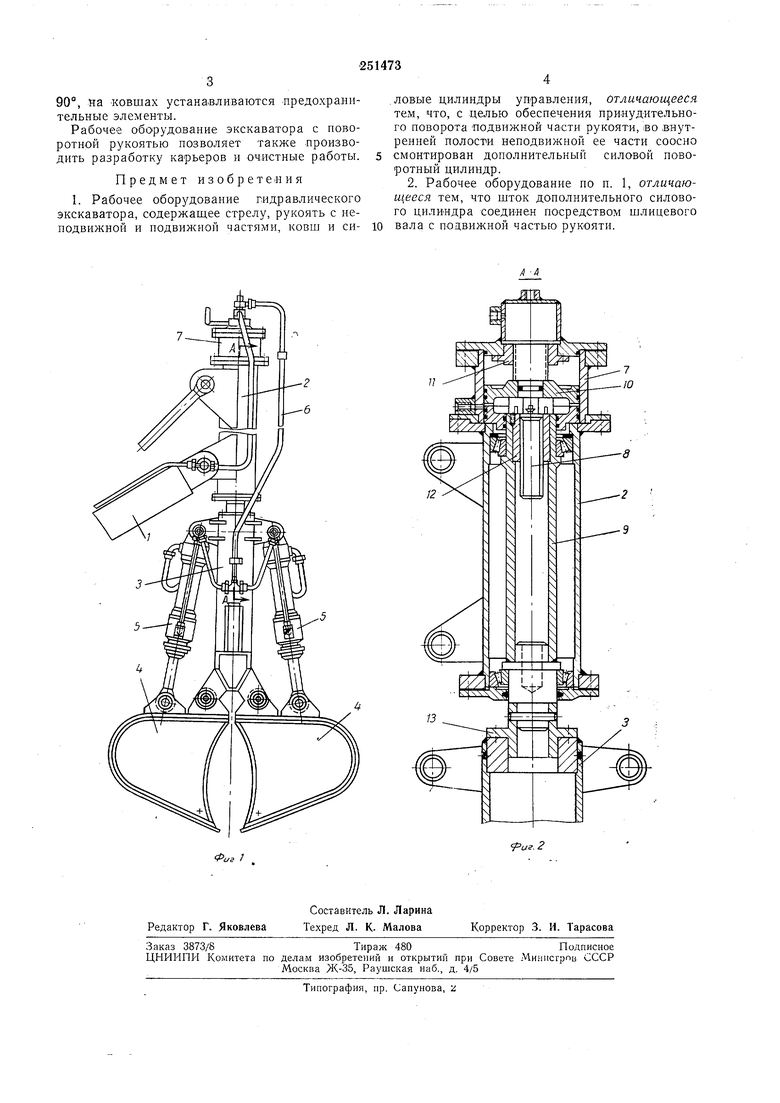
Достигается это тем, что .во внутренней полости неподвижной части рукояти соосно емоктировав дополнительный силовой поворотный цилиндр. Шток дополнительного силового цилиндра может быть соединен посредством шлицевоговала с подвижной частью -рукояти.
На фиг. 1 изображено описываемое рабочее оборудование в раз.резе; на фиг. 2 - разрез по на фиг. 1.
Рабочее оборудование содержит стре.лу L рукоять с неподвижной 2 и подвижной 5 частями, ковши 4, силовые цилиндры управления 5 и гидросистему 6.
шлццевого вала 9 с поворотной частью рукояти.
Работа экскаватора при отрывке котлованов заключается в следующем.
Базовая машина устанавливается так, чтобы она имела возмол ность отрыть две параллельные траншей. При этом выел1ку грунта производят ковшамп 4, приводимыми в действие гидроцилиндрами 5. После окончания отрывки обои.ч параллельны.х траншей производят поворот поворотной части рукоятки с ковшами на 90°. Вращение производится за счет того, что поршень 10 под давлением рабочей жидкости перемешается и тянет шток с винто:вой нарезкой. Перемещаясь вперед или назад, щток 8 проворачивается в гайке 11.
Посредством шлицев вращение штока через щлицевую втулку 12 передается валу 9, а через фланец 13 - «а поворотную часть рукояти с ковшами.
После поворота челюстей на 90° производят выработку оставшегося целика.
Экскаватор с поворотной рукоятью, работающий по такой технологической схеме разработки .котлованов, прл.меняется при строитель-, стве линий связи, когда возникает необходимость в отрывке котлованов под .монтаж кабельных муфт. При этом перед разработкой целины, во избежание повреждения пролол енного кабеля после поворота челюстей на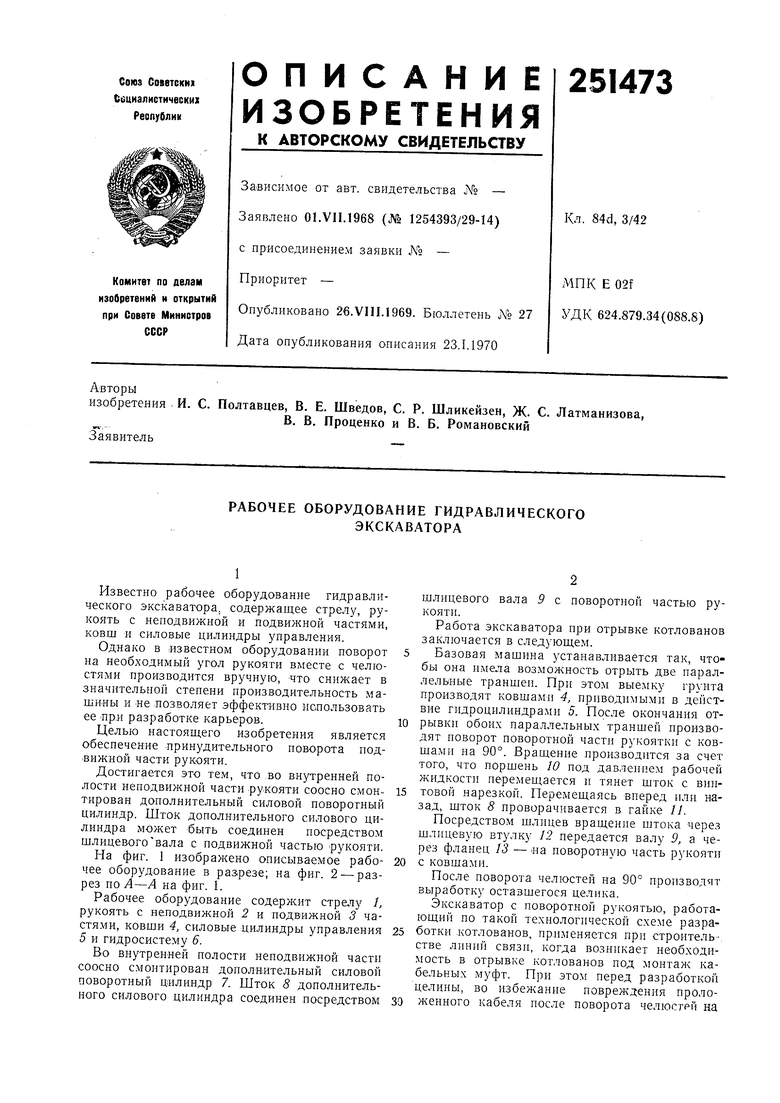
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ПЛАНИРОВЩИКА | 1967 |
|
SU222975A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |
| К. П. Еременко, Ж. П. Хомутников,С. В. Здоренко и И. В. МорозВсесоюзный научно-исследовательский институт строительного и дорожного машиностроения | 1972 |
|
SU347409A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВЫХ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ | 2005 |
|
RU2310044C2 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1980 |
|
SU1000521A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1972 |
|
SU343002A1 |
| Рабочее оборудование гидравлическогоэКСКАВАТОРА | 1973 |
|
SU798242A1 |
| Экскаватор | 1989 |
|
SU1680881A1 |
