Известна модель движения горной машины по пласту, содержащая физическую модель машины.
Предлагаемое устройство отличается от известного тем, что главная образующая точка модели соединена с механизмом разложения траектории на координаты, перемещающим вдоль магнитной ленты записывающую магнитную головку, и устройством записи траектории на ленту, а блок считывающих магнитных головок соединен с щаговыми следящими системами толкателей, взаимодействующих с моделью машины.
Это упрощает процесс физического моделирования.
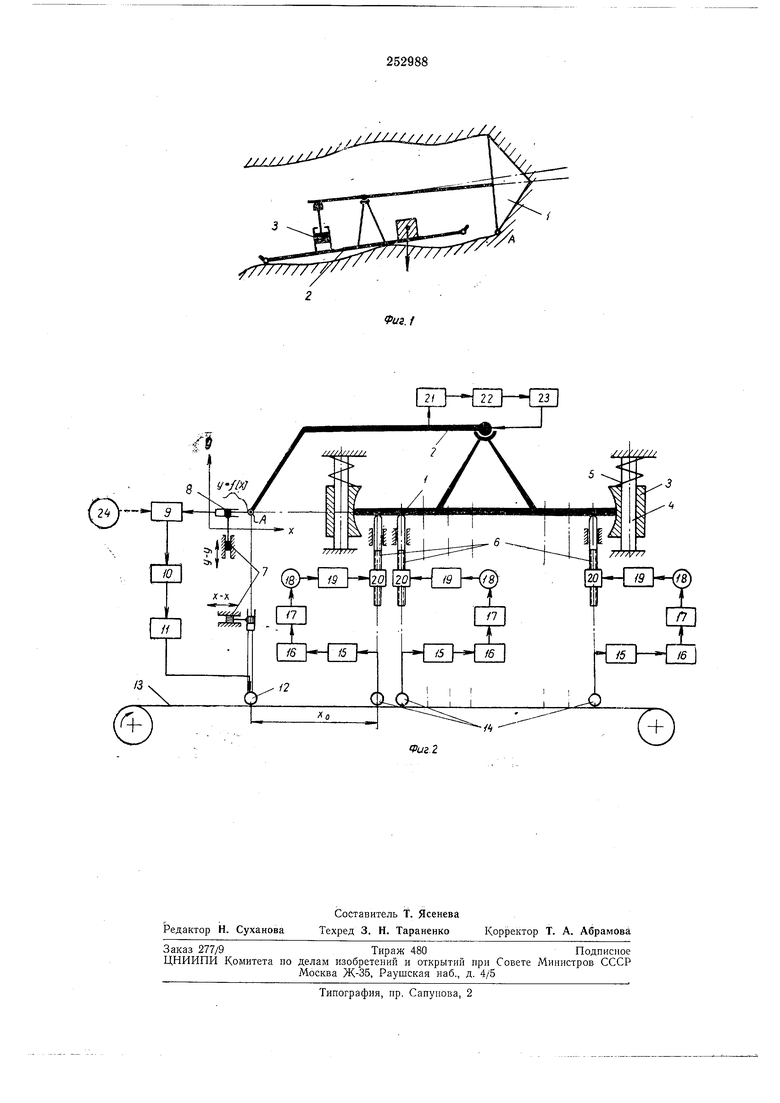
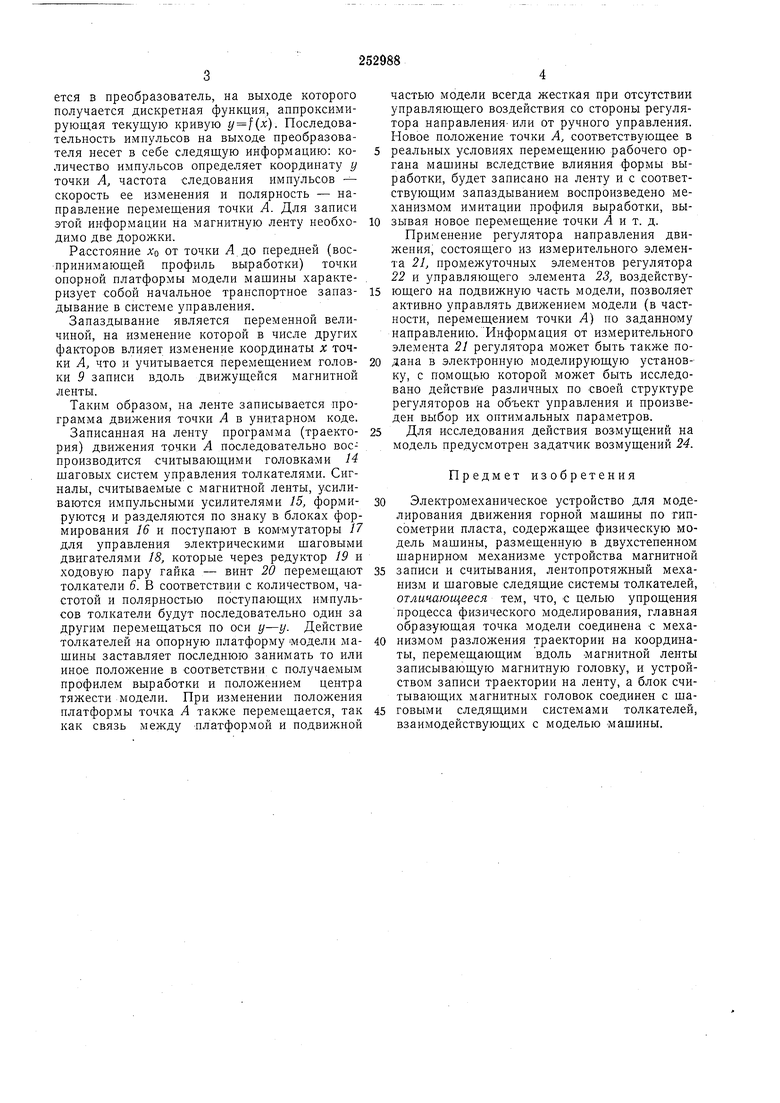
На фиг. 1 изображена физическая модель мащины; на фиг. 2 - электрическая схема.
Она СОСТОИТ из опорной платформы / и подвижной, управляемой части 2, которая может изменять -свое положение относительно платформы / под действием управляющего воздействия. Опорная платформа имеет две степени свободы и может изменять свое положение в плоскости чертежей, двигаясь плоскопараллельно. Для этого модель мащины установлена в шарнир вращения, образуемый сухарями 3, перемещающимися в вертикальной плоскости по направляющим 4. Собственный вес модели и сила лружин 5 прижимают опорную платформу к толкателям 6, имитирующим
почву выработки с заданной степенью дискретности и точности воспроизведения профиля. Траектория плоского движения точки А,
описываемая уравнением y f(x), с помощью механизма 7 разложения функции на текущие координаты (у, х) преобразуется в поступательное перемещение обоймы ползуна 8 по оси у-у и записывающей магнитной головки
9 по оси X-X.
Таким образом, движок потенциометра W, связанный с обоймой ползуна 8, воспроизводит в виде пропорционального электрического сигнала текущую координату у траектории
движения точки А, а перемещение магнитной головки 9 записи по оси х-х характеризует собой действительное положение аналогичной точки рабочего органа горной мащины при ее поступательном движении. Линейное перемещение мащины на забой (т. е. ее путь) задается с помощью движущейся магнитной ленты 11. Скорость протяжки ленты воспроизводит в заданном масщтабе скорость движения исследуемой горной мащины.
Блок записи функции y f(x) на ленту 11 состоит из потенциометра 10 или иного датчика перемещения преобразователя непрерывной величины в унитарный код 12, импульсного усилителя 13 и двухканальной магнитной
ется в преобразователь, на выходе которого получается дискретная функция, аппроксимирующая текущую кривую y f(x). Последовательность импульсов на выходе преобразователя несет в себе следящую информацию: количество импульсов определяет координату у точки А, частота следования импульсов - скорость ее изменения и полярность - направление перемещения точки А. Для записи этой информации на магнитную ленту необходимо две дорожки.
Расстояние Хо от точки Л до передней (воспринимающей профиль выработки) точки опорной платформы модели машины характеризует собой начальное транспортное запаздывание в системе управления.
Запаздывание является переменной величиной, на изменение которой в чнсле других факторов влияет изменение координаты х точки А, что и учитывается перемещением головки 9 записи вдоль движущейся магнитной ленты.
Таким образом, на ленте записывается программа движения точки А в унитарном коде. Записанная на ленту программа (траектория) движения точки А последовательно воспроизводится считывающими головка ми 14 шаговых систем управления толкателями. Сигналы, считываемые с магнитной ленты, усиливаются импульсными усилителями }5, формируются и разделяются по знаку в блоках формирования 16 и поступают в коммутаторы 17 для управления электрическими шаговыми двигателями 18, которые через редуктор 19 и ходовую пару гайка - винт 20 перемещают толкатели 6. В соответствии с количеством, частотой и полярностью поступающих импульсов толкатели будут последовательно один за другим перемещаться по оси у-у. Действие толкателей на опорную платформу модели машины заставляет последнюю занимать то или иное положение в соответствии с получаемым профилем выработки и положением центра тяжести модели. При изменении положения платформы точка А также перемещается, так как связь между платформой и подвижной
частью модели всегда жесткая при отсутствии управляющего воздействия со стороны регулятора направления-или от ручного управления. Новое положение точки А, соответствующее в реальных условиях перемещению рабочего органа машины вследствие влияния формы выработки, будет записано на ленту и с соответствующим запаздыванием воспроизведено механизмом имитации профиля выработки, вызывая новое перемещение точки Л и т. д.
Применение регулятора направления движения, состоящего из измерительного- элемента 21, промежуточных элементов регулятора 22 и управляющего элемента 23, воздействующего на подвижную часть модели, позволяет активно управлять движением модели (в частности, перемещением точки Л) по заданному направлению. Информация от измерительного элемента 21 регулятора может быть также подана в электронную моделирующую установку, с помощью которой может быть исследовано действие различных по своей структуре регуляторов на объект управления и произведен выбор их оптимальных параметров.
Для исследования действия возмущений на модель предусмотрен задатчик возмущений 24.
Предмет изобретения
Электромеханическое устройство для моделирования движения горной машины по гипсометрии пласта, содержащее физическую модель машины, размещенную в двухстепенном шарнирном механизме устройства магнитной
записи и считывания, лентопротяжный механизм и щаговые следящие системы толкателей, отличающееся тем, что, с целью упрощения процесса физического моделирования, главная образующая точка модели соединена -с механизмом разложения траектории на координаты, перемещающим вдоль -магнитной ленты записывающую магнитную головку, и устройством записи траектории на ленту, а блок считывающих магнитных головок соединен с шаговьши следящими системами толкателей, взаимодействующих с моделью машины.
U
/LLL
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРОИСКРОВОЙ УСТАНОВКОЙ | 1966 |
|
SU187502A1 |
| ;ОЮЗНАЯ | 1973 |
|
SU381491A1 |
| Цифровая вычислительная машина для подготовки программы к станкам с программным управлением | 1959 |
|
SU127721A1 |
| Универсальное моделирующее устройство для заполнения програмирующих магнитных лент | 1958 |
|
SU123391A1 |
| УСТРОЙСТВО для СОВМЕСТНОГО РЕШЕНИЯ УРАВНЕНИЙ | 1966 |
|
SU183494A1 |
| Многокомпонентные аэродинамические весы с вычислительным устройством | 1961 |
|
SU150301A1 |
| Автомат для записи и последующего воспроизведения записанного текста | 1959 |
|
SU124452A1 |
| МНОГОКАНАЛЬНОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ И СТАТИСТИЧЕСКОЙ ОБРАБОТКИИНФОРМАЦИИ | 1966 |
|
SU189238A1 |
| Автономная магнитная вариационная станция | 1972 |
|
SU437037A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОБРАБОТКИ ПЕРВИЧНЫХ СЕЙСМИЧЕСКИХ ДАННЫХ | 1966 |
|
SU177639A1 |