Существующие устройства для подготовки программы к станкам с программным управлением либо региают узкую задачу подготовки программы для ограпиченного типа профилей, либо лиляются устройствами, которые должны работать совместно с универсальной вычислительной машиной. Такая комбинация приводит к нерациональному иснользованию оборудования, так как ряд возможностей универсальной ManiHHbi не используется, а для выдачи и ввода р(:ме : уточной информации приходится применять дополнительные входные и выходные уст|юйства.
Предлагаемая мащина отличается от известных тем. что для сокращения времени подготовки программы и экономии оборудования в машину введено интерполирующее устройство, сиязаиное с основным ярифметическим устройством через буферный iaкoпитeль. Для получения плавного изменения скорости движения инструмента, облегчения программирования и сокращения оборудования в ингернолируюи).ем устройстве в качестве регистров применены динамические дс рожки магнитного барабана, закоммутированные с сумматорами последовательного действия таким образом, что осун1,ествляется линейно-квадратичное интерполирование параметрически заданньгч кривых. Для сокращения оборудования в схемах управления накопителем применены два независимых щаговых искателя, служащих для переключения усилителей записи и воспроизведения с одной дорожки магнитного барабана на другую. Для ускорения процесса решения задачи на выходе машины применен лентопротяжный механизм с переключенном (.i:opoстей, что позволяет при изменении шага интерполирования peiiiaTb задачу в оптимальном масштабе времени.
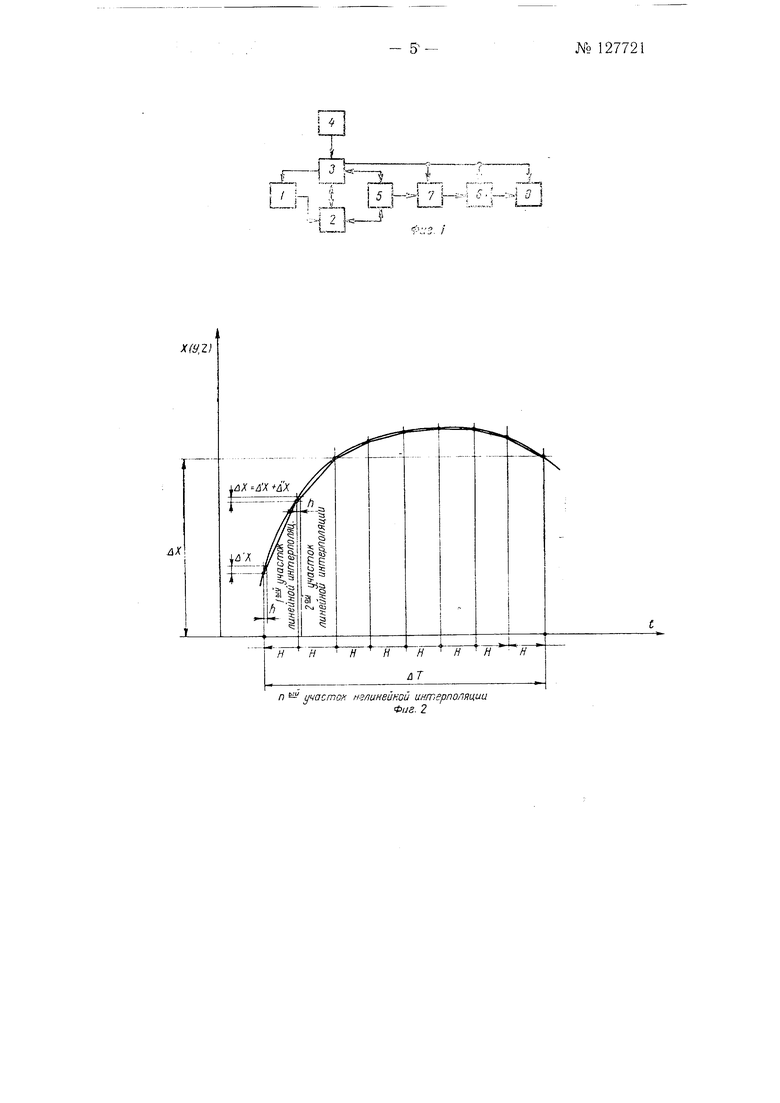
На фиг. 1 приведена функциональная схема описываемой 11л;фровой вычислительной машины; на фиг. 2 - график, поясняющий процесс
JVo 127721- 2 интерполяции; на фиг. 3 - функциональная схема интерполятора; на фиг. 4 - расположение информации в динамических регистрах магнитного барабана; на фиг. 5 - схема блока электронного переключателя с шаговыми искателями.
С помощью входного устройства / в машину вводится вся исходная информация (числовой материал и нроцрамма решения задачи). Оперативный накопитель с усилителями 2 служит для -запоминания той части исходной информации, которая рассчитывается в настоящий момент, стандартных подпрограмм и промежуточных результатов вычислений. Устройство управления .3 осуществляет управление работой маiLiHHbi по задацной программе. Пульт 4 служит для контроля и ручно1о управления работой машины. Арифметическое устройство 5 - униперсальногч) типа-с;|у кпт для осуществления того этапа вычислений, на котором требуется применение разнообразных арифметических и логических операц1п. Этот этап заключается в укрупненной обработке исходной информации и подготовке данных для интерполирования. Объем вычислений на s-тапе невелик, поэтому скорость работы арифметического устройства выбирается небольшой.
Вычислепие точек траектории центра фрезы на основании пара.метров, определенных в арифметическом устройстве, и перевод резуль-;;;;тог и унитарный код осушествляются в специализированном вычислительном устройстве (интерполяторе) 6. Интерполирование не требует сложного состава операций и производится по жесткой программе. Благодаря этому достигается высокая скорость работы интерполятора при. малых затратах оборудования. Скорость работы арифметического устройства и интерполятора подобраны так, чтобы среднее время, затрачиваемое на расчеты в арифметическом устройстве, было равно среднему времени вычислений, производимых в интерполяторе. Однако указываемое равецство может нарушаться на отдельных участках решения задачи. Это будет приводить к временным простоям арифметического устройства 5 или интерполятора 6. Чтобы свести эти простои до минимума, в машине имеется спс-циализированный накопитель 7-буферная память. Исходные данные для интерполирования, вычисленные в арифметичеc: OM устройстве, записываются в буферную память. Оттуда они выбираются в интерполятор 6 по мере окончания предыдущих вычислений.
Выходное устройство 8 служит для записи окончательных результатов вычислений на магнитную ленту.
Коммутация между блоками в описываемом устройстве обеспечивает линейно-квадратичное интерполирование парамстрпчески заданны.к кривых:
Л .--.а,/2 + 6,М- с
У 02/2 -- Ь4 -1- с(1)
Z :- аз/2 -U б„/ 4 с
где: Л , у, z - координаты, характеркзующие положение режущего инструмента; / - время.
Это означает, что каждое из уравнений системы (1) кусочно апроксимируется отрезками прямых (фиг. 2). Узловые точки этой ломаной определяются путем параболического интерполирования. Л1ежду узловыми точками осуществляется линей ая интерполяция.
Применение линейно-квадратичного интерполирования нозволяе : при заданной точности вычислений существенно сократить объем вычислений в арифметическом устройстве и, кроме того, значительно сократить объем вычислений в интерполяторе и суп1ественно уменьшить разрядную сетку интерполятора.
Интерполирование по времени (параметрическое задание функций) обеспечивает однотипность вычислений для всех трех координат, донуекает плавное изменение скорости движения инструмента вдоль траектории.
Исходная для интерполирования на я участке нелинейной интерполяции информация (фиг. 2) цервые разности , АУ, AZ; вторые разности Х, , контрольные значения АЛ , Д-У. AZ; данные об окончании участков линейной и нелинейной интерполяции и 77
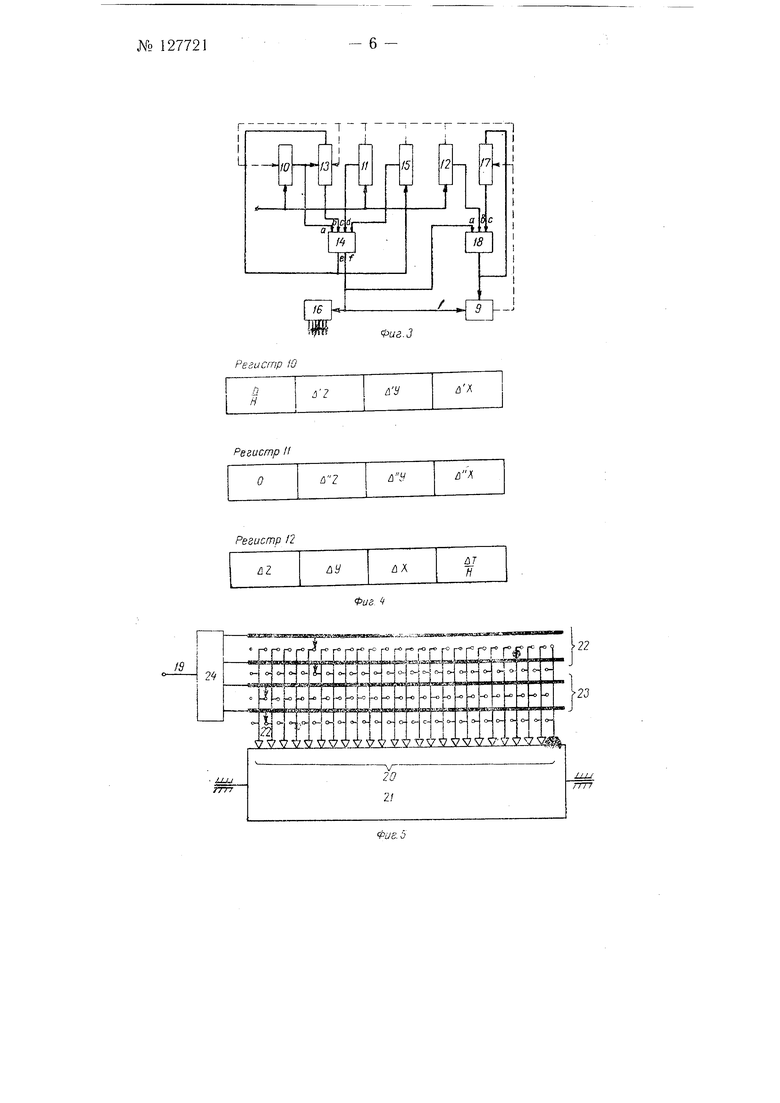
вводится в интерполятор по команде, вырабатываемой блоком управления 9 (фиг. 3) и записывается на регистры 10, 11 и 12. Все регистры интерполятора выполнены на динамических дорожках магнитного барабана. Информация располагается в регистрах, как показано на фиг. 4.
Ввод информации осуществляется на последнем линейном участке п нелинейного участка. По окончании интерполирования участке нелинейной интерполяции вырабатывается команда, по которой происходит передача информации из регистра 10 в регистр 13. Одновременно эта же информация подается на вход а сумматора 14. На входы Ь, с. d информация не подается. Результат вычислений сумматора 14 с выхода е записывается на регистр 15. Содержимое регистра 13 подается на вход и, а содержимое регистра 15 на вход d сумматора 14. Полученная на выходе е сумма записывается на регистр 15. Таким образом осуществляется линейная интерполяция.
У сумматора 14 имеется дополнительный выход /, на котором возникают сигналы переполнения разрядной сетки сумматора 14. Эти сигналы записываются через блок 16 разде.тения каналов и выходное устройство 8 (фиг. 1) на соответствующие дорожки магнитной леиты. Если переполнение возникает в момент вычисления величины Л , то эго
означает, что окончился линейный участок интерполяции и необходилю перейти к следующему участку.
Блок управления .9 переключает соответствующие клапаны, благодаря чему и осуществляется суммирование содержимого регистра 13 (первые разности) и содержимого регистра 11 (вторые разности) на сумматоре 14. Полученная сумма (первые разности второго участка линейной интерполяции) записывается на регистр 13. После этого блок управления так изменяет коммутацию, что на входы сумматора 14 поступ;;)от данные из регистра 13 и 15, а cy;, :;;п;11С з;ьаегся ка регистр /5, т. е. производится интерполирование на зторог участке/шиейной интерполяции (фиг. 2). Аналогично осуществляется переход к третьему, четвертому и т. д. участкам линейной интерполяции.
Регистры 12 к 17 служат для определения конца участка нелкне: но11 ишерполяции и контроля нравильнос1и решения. При переходе к я участку нелинейной интерполяции контрольные значения ДА . АУ, AZ, тт
подаются из ре;-иитра 12 на. вход в сумматор /6 и через сумматор 18 переписываются в регтетр 17. В дальнейше.м информация из регистра -7 подается на вход с су.мматора 18, на вход а которого приходят переполнения разрядной сетки сумматора 14 и вычитаются соответственно из контрольных значений. Разности записываются снова на регистр 17.
Д/ Если разность- и соответствующих приращений разрядной сетки
станет равной О, то это означает, что окончился я участок нелинейно интерполяции. Если при этом какое-нибудь из чисел на регистре 17 оказывается не равным О, то сигнализируется о возникновении ошибки при вычислениях.
Конструкция устройства управления учитывает, что нодготовка HIIOг зггм.1ы относится к числу таких задач, рещение которых может быть сведено к пос.тедовательной реализации стандартных подпрограмм с сравнительно небольшим количеством чисел и команд внутри поднрограл мь:. Поэтому в устройстве управления соединение числовой магист- 3 12772
ЛД Г
//
А Т
№ 127721
рали 19 (фиг. 5) с головками 20 магнитного барабана 21 осуществляется с помощью двух шаговых искателей 22 v( 23 к блока электронного переключателя 24. Каждая ламель щагового искателя соединена с одной из магнитных головок. Поскольку в общем случае положения щаговых искателей 22 и 23 разные, то к электронному переключателю оказываются подсоединенными сразу четыре головки. С помощью электронного переключателя можно осуществлять быстрое подключение одной из этих головок к числовой магистрали. Переключение шагового искателя 22 может производиться во время работы щагового искателя 23, а шагового искателя 23 во время работы щагового искателя 22. Такая система переключения магнитных головок сокран.1ает количество оборудования и обеспечивает достаточно высокую скорость обращения к накопителю. В выходном устройстве 5 (фиг. 1) предусматривается возможность ступенчатого изменения скорости движения ленты в пшроком диапазоне. Это позволяет рещать задачу подготовки программы в оптимальном
маса1табе времени/п ., - (V,,,,, -скорость движения ленты
fiOl Пр
при записи; Увоспр- - скорость движения ленты при воспроизведенииХ т. е. выбирать т таким, чтобы время решения задачи было минимальным.
Предмет изобретения
1.Цифровая вычислительная машина для подготовки программы к станкам с программным управлением, содержащая арифметическое устройство, устройство управления, накопитель с усилителями, устройства ввода и вывода, отличающаяся тем, что, с целью сокращения времени подготовки программы и экономии оборудования, в магнину введено интерполирующее устройство, связанное с основным арифметическим
. устройством через буферный накопитель.
2.Устройство по п. 1, отличающееся тем, что, с целью получения плавного изменения скорости движения инструмента, облегчения программирования и сокращения оборудования, в интерполирующем устройстве применены в качестве регистров динамические дорожки магнитного барабана, закоммутированные с двумя сумматорами последовательности действия таким образом, что осуществляется линейно-квадратичное интерполирование параметрически заданных кривых.
3 Устройство по п. 1, отличающееся тем, что, с целью сокращения оборудования, в схемах управления накопителем применены два независимых шаговых искателя, служащих для переключения усилителей записи и воспроизведения с одной дорожки магнитного барабана на другую.
4. Устройство по п. 1,отличающееся тем, что, с целью ускорения процесса рещения задачи, на выходе машины применен лентопротяжный механизм с переключением скоростей, позволяющий при изменении щага интерполирования рещать задачу в оптимальном масштабе времени.
.1,
1 i
Ч LI J
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1959 |
|
SU120781A1 |
| Круговой интерполятор | 1978 |
|
SU798730A1 |
| Цифровой адаптивный линейный интерполятор | 1982 |
|
SU1095189A1 |
| Устройство для программного управления | 1987 |
|
SU1427333A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| СПОСОБ УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365964C2 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
n участок н-элинейнои интерполяции Ф/уг. 2
Регистр iO
Регистр II
Регистр 12
Фиг. J
