Известны системы ирограммного управления электроискровыми установками для обработки непрофилированным электродом деталей с прямолинейными контурами, параллельными осям координат, с различными способами интерполяции приращений координат, и устройствамн для отвода и подвода инструмента по пройденной траектории.
Описываемая система программного управления электроискровой установкой позволяет осуществлять реверс нри коротких замыканиях с отводом электрода по пройденной траектории. Это достигается применением электронной коммутации считывающих фотодиодов с автоматической выборкой соответствующего кадра программы.
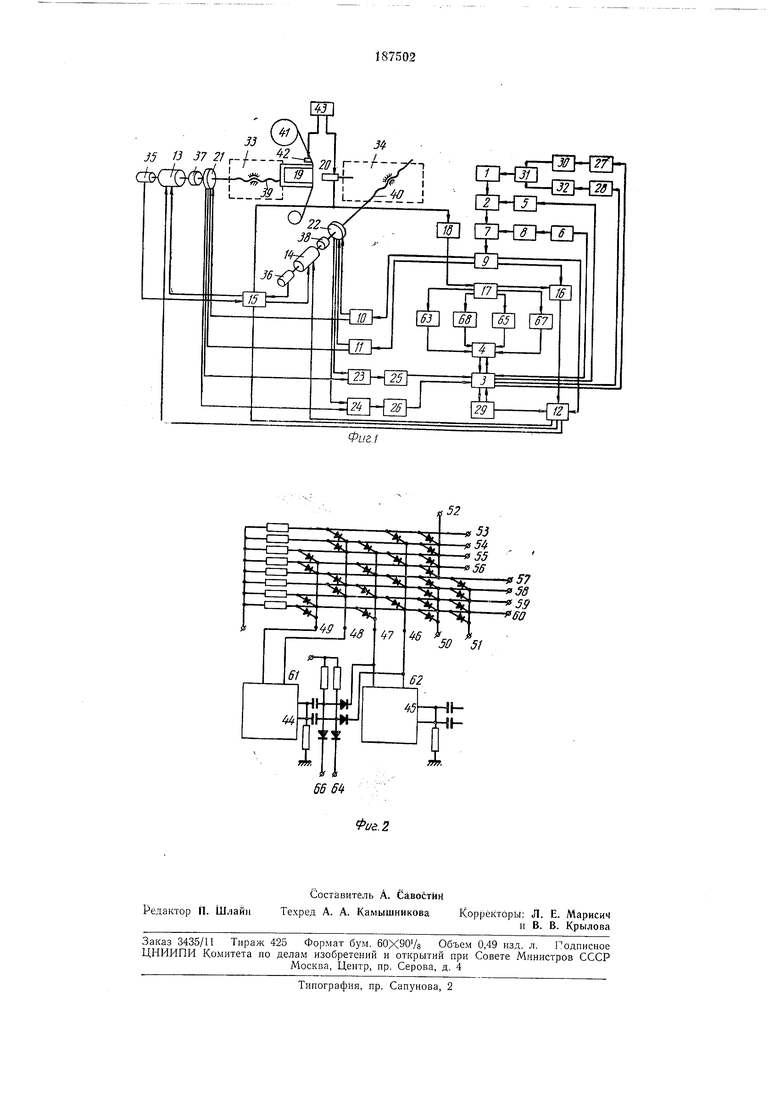
На фиг. 1 изображена блок-схема устройства, построенного по описываемой системе; на фиг. 2 - схема коммутатора системы.
Координаты точек, образующих контур обрабатываемой детали, записываются на перфоленте. Так как система предназначена только для изготовления деталей с прямолинейными контурами, параллельными осям координат, Б каждом кадре записывается только одна координата - X или У. В системе имеется два двигателя, один из которых обрабатывает деталь по лиииям, параллельным оси X, другой - по линиям, параллельным оси У. Продолжительиость работы двигателей определяется координатами конечных точек отрезков прямых линий.
Система управления иепрерывно сравнивает координату положеиия обрабатывающего электрода с узловыми точками траектории, записанной на перфоленте. Если обрабатывающий электрод перемещается по направлению к какой-либо точке, производится иепрерывное сравнение координат электрода и этой точки. При коротком замыкании искрового промежутка электрод начинает двигаться к предыдущей точке, и поэтому координата электрода начинает сравниваться с координатой этой предыдущей точки. При совпадении координат электрода с заданными система управления тормозит двигатель и перемещает перфоленту на следующий кадр. Производится чтение программы, записанной на очередном кадре, и ее отработка.
При обработке контура, состоящего из отрезков прямых, перпендикулярных друг другу, в случае короткого замыкания необходимо смещать программы на 2 кадра назад, так как координата, с которой в этом случае сравнивают положение электрода, записана на предыдущем участке, параллельном обрабатываемому.
значение координаты, одна дорожка предназначена для записи координаты (X или У), другая - для записи направления движения, последняя - одиннадцатая дорожка используется для записи направления подачи при коротком замыкании. Считывание программы осуществляется фотоэлектрической головкой 2, содержащей сорок четыре фотодиода, по одиннадцать в каждом ряду. Фотоэлектрическая головка считывает четыре соседних кадра. Первый кадр определяет движение электрода при обработке изделия, три последующих кадра определяют траекторию в непосредственной близости от обрабатывающего электрода. Это позволяет осуществить электрическую схему црограммы в точках излома траектории путем подачи питания на соответствующую группу фотодиодов, что избавляет от необходимости быстрого перемещения ленты при коротком замыкаиии.
Очередность считывания программы задается матрицей - распределителем команд 3, которая в зависимости от комбинации сигналов на ее входе выдает командные импульсы на различные блоки системы управления и исполнительные органы установки.
Фотодиоды питаются импульсным напряжением с частотой 2 кгц и длительностью импульсов 40 мк сек. В зависимости от положения реверсивного кольцевого коммутатора 4, собранного на двух триггерах, на одном из четырех выходов матрицы - распределителя команд 3 появляются импульсы, которые подаются на сетку одного из катодных повторителей блока 5 катодных повторителей, к выходу которого подключены одиннадцать фотодиодов одного ряда. Импульсный режим системы задается модулятором 6, который модулирует матрицу - распределитель комаид 3. Сигналы с одиннадцати фотодиодов головки 2 подаются на формирователи импульсов 7, представляющие собой катодные усилители, на первые сетки которых поступают сигналы с фотодиодов, а на пентодные сетки поступают задержанные на несколько микросекунд в линии задержки 8 импульсы от модулятора 6. Это улучшает передние фронты импульсов, так как импульсы, снятые с фотодиодов, имеют разброс по величине нарастания переднего фронта. С формирователей импульсов 7 импульсы поступают на блок 9 триггеров Шмитта, где импульсы формируются по амплитуде. Выходы восьми триггеров Шмитта подключены ко входу двух диодных дешифраторов W и //, которые переводят записанное в двоичном коде число в десятичное позиционное число. Дешифратор 10 выдает цифры разряда сотых долей миллиметра, дешифратор // - разряда десягых долей миллиметра. Кроме того, дешифраторы имеют дополнительные выходы, предназначенные для включения и выключения системы управления.
коммутатор 12 выходных цепей. Коммутатор посредством реле подключает двигатели подачи 13 или 14 к усилителю 15 следящей системы. Направление подачи задается коммутатором 16 знака подачи, представляющим схему совпадения типа «И, собранную на двух пентодах. Коммутатор 16 имеет четыре входа. На один вход с десятого триггера блока 9 триггеров подается сигнал, соответствующий знаку
подачи при прямом ходе инструмента, на другой вход - с одиннадцатого триггера блока 9 подается сигнал, соответствующий знаку подачи при обратном ходе инструмента. На два других входа подаются напряжения с анодов
триггера 17 Шмитта, который срабатывает при коротких замыканиях искрового промежутка. Триггер 17 Шмитта через усилитель 18 подключен к электродам 19 и 20 электроискровой установки.
Выходы дешифраторов 10 и 11 подключены к датчикам положения 21 и 22. Датчик положения 21 выдает координаты по оси X, а датчик 22 - по оси У. Датчик положения представляют собой фотоэлектрические устройства
типа «И.
Выходы датчиков цоложения 21 и 22 подключены к логическим схемам типа 23 и 24 «И --«ИЛИ, каждая из которых собрана на двух пентодах. На первые сетки пентодов поступают сигналы с фотодиодов датчиков, а пентодные сетки управляются девятым триггером блока 9 триггеров Шмитта. Со схем 23 и 24 сигналы поступают на триггеры 25 и 26 Шмитта. При совпадении текущей координаты с записанной на ленте триггеры 25 и 26 Шмитта срабатывают одновременно, вследствие чего матрица - распределитель команд 3 запускает ждущие мультивибраторы 27 (или 28) и 29. Мультивибратор 27 подает импульс
длительностью 0,05 сек на усилитель 30 прямого хода перфоленты, управляющий соответствующим электромагнитом в устройстве 31 для перемещения ленты. Мультивибратор 29 генерирует импульс длительностью 0,1 сек,
который запирает матрицу - распределитель команд, чтобы за время смены кадров не появилось ложных имиульсов. Мультивибратор 28 служит для выработки импульсов, управляющих усилителем электромагнита в устройстве
32 обратного хода перфоленты.
Для подачи координатных столов 33 и 34 используются малоинерционные двигатели 13 и 14 типа АДП-262 или ДГ-ЗА. В случае выбора АДП-262 используются тахогенераторы 35 и 36 типа ТГП-3, имеющие малые моменты трения на валу. Напряжения с тахогенераторов подаются на усилитель 15 следящей системы. Двигатели 13 и 14 посредством понижающих редукторов 37 и 38 вращают винты 39 и 40.
Обрабатывающий электрод (проволока) 19 перематывается устройством перемотки 41 и фиксируется устройством 42. Генератор имимпульсы, вызывающие эрозию обрабатывае мой детали.
Кольцевой реверсивный коммутатор 4 собран на двух триггерах 44 к 45 и управляется триггером 17 Шмитта. Матрица - распределитель команд 5 коммутируется реверсивным коммутатором и представляет собой дешифратор на диодах с входами 46, 47, 48, 49, 50, 51, 52 и выходами 53, 54, 55, 56, 57, 58, 59 и 66. Входы 46, 47, 48, 49 матрицы соединены с анодами триггеров 44 и 45, поэтому потенциалы на выходах матрицы зависят от состояния триггеров. Так как вход 52 матрицы модулируется импульсным напряжением от модулятора 6, на выходах матрицы могут появляться только импульсные напряжения. Если высокие потенциалы подаются на аноды 61 и 62 триггеров 44 и 45, импульсы появляются на выходе 53 матрицы, и запитывается первая группа фотодиодов головки 2. При возникновении короткого замыкания искрового промежутка с триггера 17 Шмитта через линию зазадержки 63 на вход триггера 45 поступает отрицательный запускающий импульс, который переводит триггер в другое устойчивое состояние. При этом импульсы появляются на выходе 54 матрицы, и запитывается вторая группа фотодиодов. Одновременно с триггера 17 Шмитта на клемму 64 кольцевого коммутатора через интегрирующую цепочку 65 подается высокий потенциал, а на клемму 66 - низкий, что соответствует готовности кольцевого коммутатора к переключению в прямом направлении. Если в таком состоянии на вход триггера 45 подавать запускающие импульсы, то будет происходить смена программы в обратном направлении, т. е. импульсы будут появляться последовательно на выходах 54, 55 и 56. После окончания короткого замыкания высокий потенциал через интегрирующую цепочку 67 подается на клемму 66, что соответствует готовности кольцевого коммутатора к переключению в обратном направлении. В этом случае импульсы на выходах матрицы появляются в обратной последовательности - на выходах 56, 55, 54, 53.
Если обработка производится по прямой линии, состоящей из нескольких участков, координаты концов которых записаны на ленте, при коротком замыкании головкой 2 будет читаться кадр, соответствующий началу обрабатываемого участка - второй ряд фотодиодов. При достижении электродом этой точки на выходе 59 матрицы появится положительный импульс (от совместного срабатывания
триггеров 25 и 26 Шмитта), задним фронтом которого опрокинется линия задержки 63 и коммутатор будет переведен в состояние, обеспечивающее запитку третьего ряда фотодиодов. При прохоледении электродом точки, записанной в этом кадре, аналогично осуществляется переход на четвертую группу фотодиодов. ЕСЛИ короткое замыкание не прекращается и после этого, дальнейшая смена программы производится путем перемещения ленты в обратном направлении. Для этого с выхода 58 матрицы запускающие импульсы подаются на мультивибратор 28, управляющий устройством 32 обратного хода перфоленты. В этом случае программа считывается четвертой группой фотодиодов.
После ликвидации короткого замыкания посредством линии задержки 65 и триггера 17 Шмитта производится переключение коммутатора, и импульсы появляются на выходе 55 матрицы. Смена программы электрическим путем происходит до тех пор пока считывание не будет производиться первой группой фотодиодов, а затем смена программы будет осуществляться перемещением ленты в прямом направлении.
В случае обработки профиля, составленного из отрезков взаимно перпендикулярных прямых, происходит смена программы в обратном направлении на один кадр (переключение на вторую группу фотодиодов). Но так как предыдущий отрезок перпендикулярен обрабатываемому, программа во всех его точках будет выполнена, и на входы 50 и 51 матрицы с выходов триггеров 25 и.26 поступят сигналы на смену программы. На выходе 59 матрицы появится сигнал, который с помощью лииии задержки 63 переключит коммутатор 4 в следующее положение, т. е. считывание будет производиться третьей группой фотодиодов.
Предмет изобретения
Система программного управления электроискровой установкой для обработки не профилированным электродом деталей с прямолинейными контурами, параллельными осям координат, с использованием фотодатчиков полол-сения и с записью координат узловых точек на перфоленте, отличающаяся тем, что, с целью осуществления реверса при коротких замыканиях с отводом электрода по пройденной траектории, применена электронная коммутация считывающих фотодиодов с автоматической выборкой соответствующего кадра программы. JS /J ,/-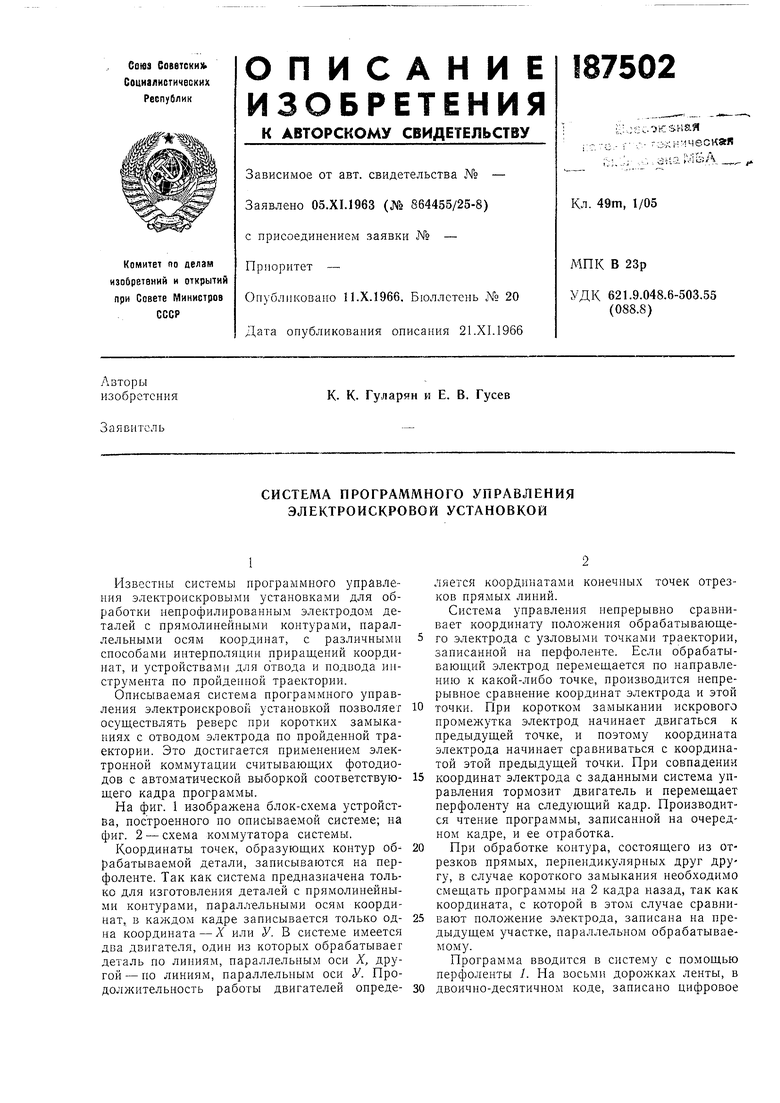
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОИСКРОВАЯ УСТАНОВКА С ПРОГРАММНЫМ | 1965 |
|
SU176174A1 |
| Контурная система программного управления | 1989 |
|
SU1681298A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| Графический дисплей с контролем | 1984 |
|
SU1249526A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Система программного управленияэлЕКТРОэРОзиОННыМи пРОшиВОчНыМиСТАНКАМи | 1976 |
|
SU808012A3 |
| Преобразователь телевизионного стандарта | 1980 |
|
SU1238267A1 |
| Устройство для отображения информации на экране цветного видеоконтрольного блока | 1988 |
|
SU1529280A1 |
| Стенд для проверки релейных устройств | 1976 |
|
SU603019A1 |