Предлагаемый снособ относится к области проектирования релейных систем автоматического регулирования.
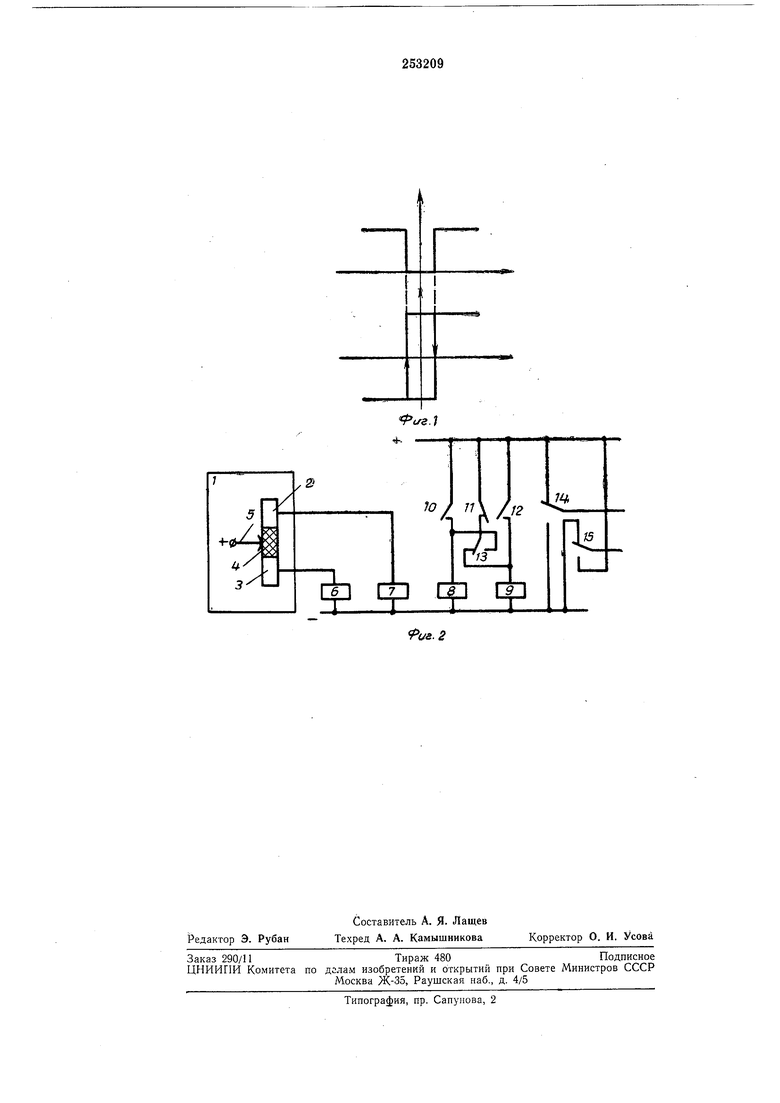
Пзвестный способ получения релейной петлевой характеристики с опережением заключается в том, что формируют сигнал двух уровней и иротивоположных знаков и скачкообразно изменяют этот сигнал в те моменты, когда абсолютная величина сигнала рассогласования становится меньше или больше величины половины зоны нечувствительности.
Указанный способ не обеспечивает устойчивости системы автоматического управления в том случае, если под влиянием возмуШ;аюш,их воздействий при выходе из зоны нечувствительности сигнал рассогласования сохраняет свой знак, который он имел при последнем переходе в эту зону.
Предложенный способ отличается от известного тем, что он предполагает дополнительно изменять формируемый сигнал при выходе значения сигнала рассогласования из зоны нечувствительности, если он сохраняет знак, который имел при последнем переходе в эту зону.
Это увеличивает устойчивость системы управления.
где 1 - Датчик рассогласования угловых или линейных перемеш,ений; 2 н 3 - проводящие ламели; 4 - изоляционный промежуток; 5 - ш,етка датчика рассогласования; 6-9 - электромагнитные реле; 10 - контакт реле 7; //- контакт реле 6; 12 - контакт реле 7; 13 - контакт реле S; 14 vi 15 - контакты реле 9.
Устройство имеет датчик I рассогласования угловых или лнейных перемешений, состоящий
из двух проводящих ламелей 2 и 5, разделенных изоляционным промежутком 4, и щетки 5, к которой подводится напряжение источника, и релейную схему, собранную на электромагнитных реле 6-9.
Предполагается, что устройство включено в замкнутую систему автоматического регулирования таким образом, что при обесточенном реле 9 сигнал обратной связи заставляет перемещаться щетку 5 датчика / вверх, а при запитанном реле 9 - вниз.
Начальное полол ение щетки датчика произвольное.
Если в момент подачи питания на систему щетка датчика находится на одной из ламелей,
срабатывает реле, соединенное с соответствующей ламелью, контакт его замыкает или размыкает цепь подачи напряжения на реле 9, от состояния которого зависит полярность сигнала на выходе устройства, а следовательно, и
Пусть в момент включения питания на систему щетка находится на ламели 3. Тогда сработает реле 6, контакт // которого размыкает цепь подачи питания на реле 9. При обесточенном реле 9 сигнал обратной связи заставляет щетку перемещаться вверх.
С переходом щетки на изоляционный промежуток 4 отпускает реле 6 и своим контактом
11через размыкающий контакт 13 обесточенного реле 8 включает реле 9. Это реле, срабатывая, изменяет полярность выходного сигнала релейной схемы, что приводит к торможению системы. Однако из-за инерционности системы щетка продолжает перемещаться вверх. При переходе щетки на ламель 2 срабатывает реле 7, замыкающее свой контакт 12 в цепи реле 9 и включающее контактом 10 реле 8. Реле 8, срабатывая, размыкает цепь питания реле 9 через контакт 13, однако последнее остается под током, так как замкнут контакт
12реле 7, благодаря чему полярность сигнала на выходе устройства не изменяется. В результате торможения системы щетка начнет перемещаться вниз. При достижении изоляционного промежутка 4 реле 7 обесточивается и своим контактом 12 отключает реле 9, что приводит к изменению полярности выходного сигнала устройства и к новому торможению системы. Контакт 10 реле 7 размыкается, однако реле 8 остается под током, так как его контакт 13 находится в правом положении, а контакт 11 реле 6 замкнут. При переходе щегки на ламель 3 срабатывает реле 5, размыкающее контакт 11 и отключающее реле 8. Реле 9 остается в обесточенном состоянии. Далее цикл повторяется.
Рассмотрим работу системы в случае, если щетка, начиная движение с ламели 3, затормозится, не выходя за пределы изоляционного промежутка, и возвратится на ламель 3. Пока щетка находится на ламели 3 реле 9 обесточено, так как разомкнут контакт // реле б, находящегося под током. При выходе щетки на изоляционный промежуток реле 9 срабатывает, изменяя знак выходного сигнала,
как это было рассмотрено выше. При возвращении щетки на ламель 3 знак выходного сигнала снова изменяется, так как срабатывает реле 6, отключающее реле 9. Щетка затормозится и начнет перемещаться вверх.
Неустойчивой работы системы не возникает.
Предмет изобретения
Способ формирования релейной петлевой характеристики с опережением для систем автоматического управления, работающих в колебательном режиме, при помощи датчика, имеющего характеристику с зоной нечувствительности, основанный на формировании сигнала
двух уровней и скачкообразном изменении этого сигнала в моменты перехода значения сигнала рассогласования границы зоны нечувствительности датчика, отличающийся тем, что, с целью увеличения устойчивости системы,
дополнительно скачком изменяют уровень формируемого сигнала в моменты выхода значения сигнала рассогласования из зоны нечувст- вительности, если при этом сигнал рассогласования остается того же знака, что и перед последним входом значения последнего в зону нечувствительности.
°L Л/J
j
tf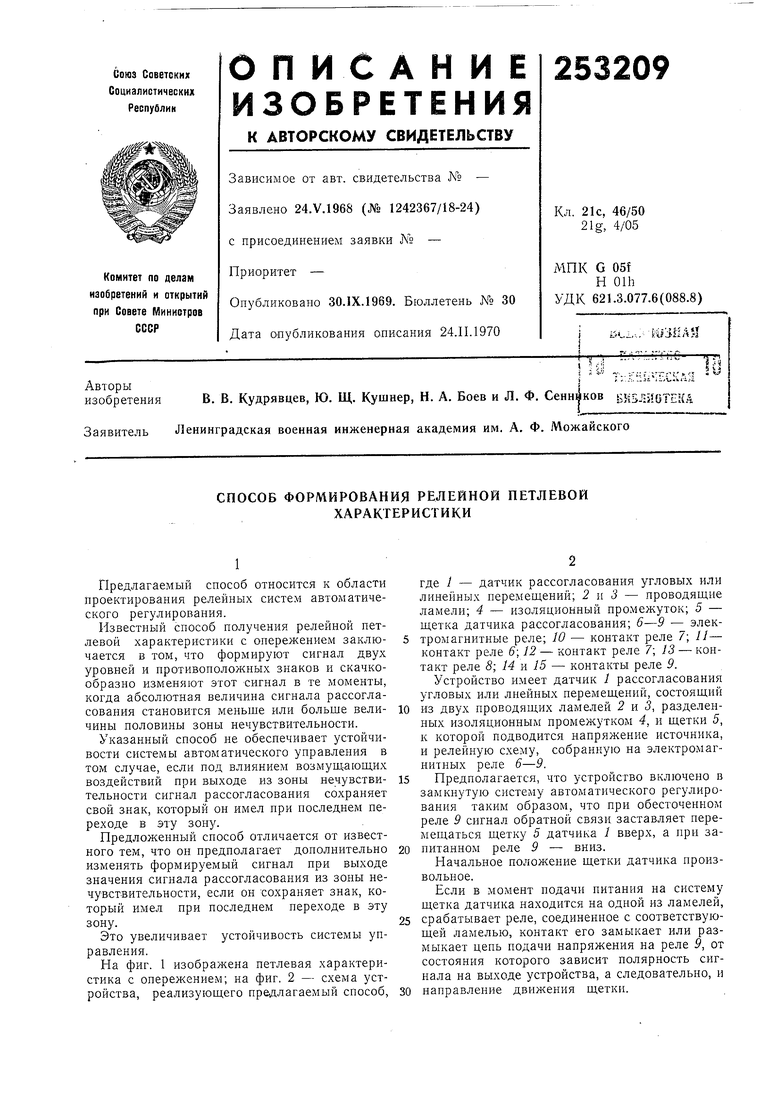
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РЕЛЕЙНОЙ ПЕТЛЕВОЙ ХАРАКТЕРИСТИКИ С ОПЕРЕЖЕНИЕМ | 1967 |
|
SU224642A1 |
| О.ЮЗНАЯ j/•••u:«c-rai;r/^^^.ЬИБЛИОТь-кд | 1971 |
|
SU310238A1 |
| РЕЛЕЙНОЕ УСТРОЙСТВО | 1970 |
|
SU265221A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЭЛЕКТРОДНОЙ ПЕЧИ | 1970 |
|
SU262286A1 |
| Автоматический компенсатор | 1948 |
|
SU80419A1 |
| Устройство для самовыключения экстремального регулятора | 1959 |
|
SU127869A1 |
| Регулятор мощности дуговой электро-пЕчи | 1979 |
|
SU797086A1 |
| АНАЛОГОВЫЙ ИНТЕРПОЛИРУЮЩИЙ ДАТЧИК ОБРАТНОЙ СВЯЗИ | 1973 |
|
SU383002A1 |
| Позиционный регулятор для систем с запаздыванием | 1985 |
|
SU1283709A1 |
| Частотно-импульсный регулятор температуры | 1981 |
|
SU1010606A1 |