Предлагаемое релейное устройство с петлевой характеристикой относится к релейным системам автоматического управления.
Р1звестные релейные устройства содержат датчики релейного типа, логические устройства и коммутатор.
Однако такие устройства сложны.
Предложенное устройство отличается тем, что в нем выход датчика рассогласования соединен со входом первого элемента «НЕ и с первыми входами второго н третьего элементов «И логического блока, причем вход второго элемента «НЕ соединен с выходом второго элемента «ИЛИ, первый вход первого элемента «И - с выходом первого элемента «ИЛИ, второй вход первого элемента «И - с выходом первого элемента «НЕ, второй вход второго элемента «И - с выходом второго элемента «НЕ, второй вход третьего элемента «И - с выходом второго элемента «ИЛИ, первый вход первого элемента «ИЛИ - с выходом первого элемента «И, второй вход первого элемента «ИЛИ - с выходом второго элемента «И, первый вход второго элемента «ИЛИ - с выходом первого элемента «И, второй вход второго элемента «ИЛИ - с выходом третьего элемента «И, выход первого элемента «ИЛИ соединен со входом коммутатора.
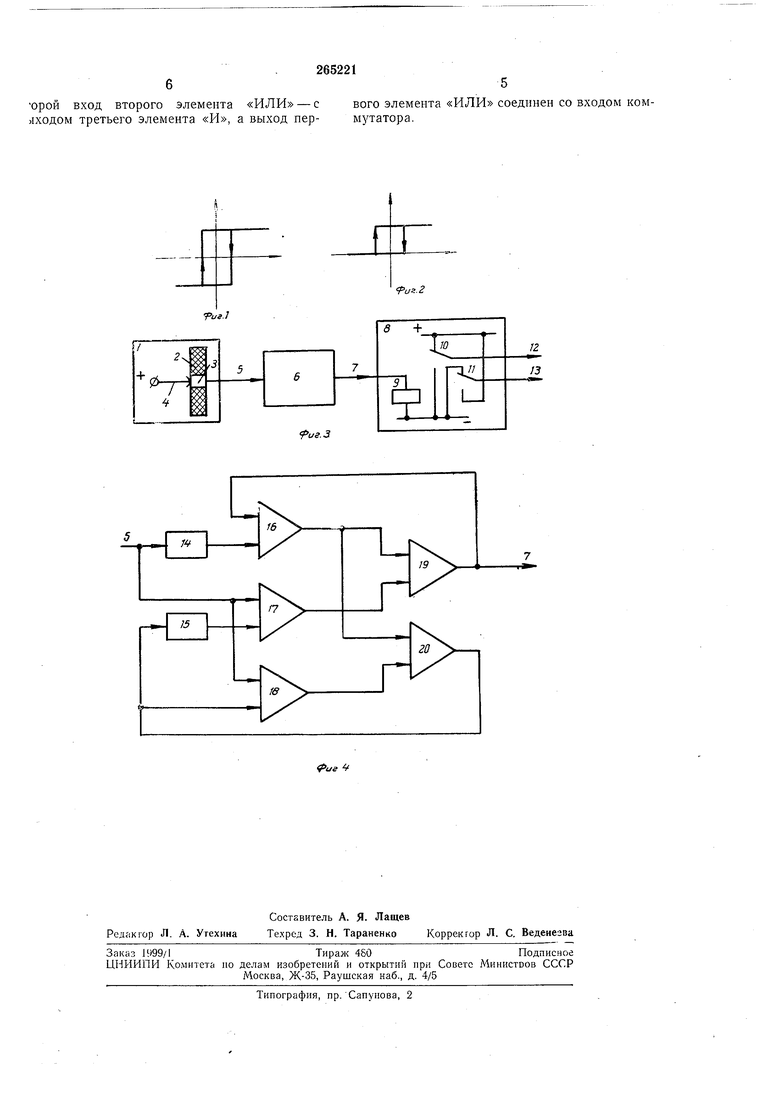
На фиг. 1 показана релейная петлевая характеристика с опережением; на фиг. 2 - характеристика логического блока и датчика рассогласования; на фиг. 3 - релейное устройство, имеющее петлевую характеристику с опережением; на фиг. 4 - схема логического блока.
Релейное устройство содержит датчик / рассогласования, состоящий из изоляционного основания 2. на котором крепится токопроводящая ламель 3, являющаяся выходом датчика рассогласования, и щетка 4, к которой подводится напряжение постоянного тока. Логический блок 6 имеет один вход 5 и один выход 7.
Коммутатор 8 содержит реле 9 с двумя переключающими контактами 10, 11 и имеет два выхода 12, 13, к которым подключается нагрузка. Логический блок состоит из двух логических
элементов «НЕ (М, 15, трех логических элементов «И (16-18) и двух логических элементов «ИЛИ (19 и 20). Датчик 1 рассогласования угловых или линейных перемещений и логический блок реализуют характеристику
(см. фиг. 2), на которой по оси абсцисс отложена величина сигнала на входе датчика 1, а по оси ординат - напряжение или ток на выходе логического блока. Коммутатор преобразует характеристику, показанную на фиг. 2,
Предполагается, что устройство включено в замкнутую систему автоматического регулирования, при этом последняя работает в режиме автоколебаний, и амплитуда колебаний щетки датчика такова, что щетка выходит за пределы проводящей ламели.
Сигнал на выходе логического блока может принимать значения «О (отсутствие напряжения) и «1 (наличие напряжения, достаточного для срабатывания коммутационного реле 9).
Устройство включается в контур системы регулирования так, что при появлении на выходе логического блока сигнала «О управляющее воздействие отклоняет щетку датчика рассогласования вверх, а при появлении сигнала «1 - вниз.
В исходном состоянии питание с логического блока снято, щетка датчика рассогласования находится на нижнем участке изоляционного основания, цепь подачи воздействия на щетку со стороны системы регулирования разомкнута. В этом состоянии последовательно подается иитание на логический блок и замыкается цепь подачи воздействия на датчик рассогласования.
При подаче питания нулевой сигнал с выхода датчика рассогласования иостунает на вход элемента «И 17, а через элемент «НЕ М-на вход элемента «PI 16, на другой вход которого поступает нулевой сигнал с выхода логического блока. На оба входа элемента «ИЛИ 19 подан один нулевой сигнал с элемента «И 16, другой - с элемента «И /7, а на его выходе (выходе логического блока) будет нулевой сигнал, при котором управляющее воздействие отклоняет щетку датчика рассогласования вверх.
При нриходе щетки на ламель на входе логического блока появляется единичный сигнал. Он поступает на нервый вход элемента «И 77, и так как на втором его входе был единичный сигнал, который поступал с выхода элемента «НЕ 15 (на оба входа элемента «ИЛИ 20 поданы нулевые сигналы: один - с выхода элемента «И 16, другой с выхода датчика рассогласования через элемент «И 18}, то и на выходе элемента «И 17 будет единичный сигнал, который через элемент «ИЛИ 19 поступает на выход логического блока. При единичном выходном сигнале логического блока управляющее воздействие тормозит движение щетки датчика вверх. Однако из-за инерционности системы щетка продолжает двигаться вверх.
При переходе щетки на верхний изоляционный участок сигнал на выходе 7 остается равным «1, так как нулевой сигнал с выхода датчика рассогласования поступает через элемент «НЕ 14 на вход элемента «И 16, на второй вход которого подан единичный сигнал с выхода логического блока.
С приходом ее на ламель с выхода датчика рассогласования единичный сигнал инвертируется элементом «НЕ 14 и через элемент «И 16 поступает на вход элемента «ИЛИ 19, а так как на втором входе его был нулевой сигнал с выхода элемента «И П (единичный сигнал с выхода элемеита «И 18, на однн вход которого «1 поступала с выхода датчика рассогласования, а на другой - с выхода элемента «И 16 через элемент «ИЛИ 20, поступал на вход элемента «НЕ 15, а с него на элемент «И 17), что на выходе элемента «ИЛИ 19 будет нулевой сигнал. На систему регулирования выдается управляющее воздействие, тормозящее движение щетки датчика вниз.
С приходом щетка на нижний участок изоляционного основания нулевой выходной сигнал логического блока не изменится, так как
на выходах элементов «И 16 и «И 17 будут нулевые сигналы на вход элемента «И 16 поступает сигнал «О с выхода логического блока, на вход элемента «PI 17 поступает сигнал «О с выхода датчика).
Сигналы во всех точках логического устройства не отличаются от сигналов в исходном состоянии. В результате управляющего воздействия система затормаживается и начинает двигаться в обратном направлении. Цикл повторяется.
Когда щетка находится на ламели, сигнал на выходе логического блока зависит от направления движения щетки, так как логический блок запоминает направление движения
щетки (при движении щетки вверх на выходе элемента «И 17 единичный сигнал, при движении вниз - нулевой).
Предмет изобретения
Релейное устройство с петлевой характеристикой с опережением, содержащее релейный
датчик рассогласования, логический блок с элементами «И, «ИЛИ, «НЕ и коммутатор, отличающееся тем, что, с целью упрощения аппаратуры и повышения надежности, в нем выход датчика рассогласования соединен со
входом первого элемента «НЕ и с первыми входами второго и третьего элементов «И логического блока, причем вход второго элемента «НЕ соедпнен с выходом второго элемента «ИЛИ, первый вход первого элемента «И -
с выходом первого элемента «ИЛИ, второй вход первого элемента «И - с выходом первого элемента «tiE, второй вход второго элемента «И - с выходом второго элемента «НЕ, второй вход третьего элемента
«И - с выходом второго элемента «Р1ЛИ, первый вход первого элемента выходом первого элемента «И, второй вход первого элемента «ИЛИ - с выходом второго элемента «И, первый вход второго элемента б орой вход второго элемента «ИЛИ - с 1ходом третьего элемента «И, а выход пер5вого элемента «ИЛИ соединен со входом коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| О.ЮЗНАЯ j/•••u:«c-rai;r/^^^.ЬИБЛИОТь-кд | 1971 |
|
SU310238A1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕЛЕЙНОЙ ПЕТЛЕВОЙ ХАРАКТЕРИСТИКИ С ОПЕРЕЖЕНИЕМ | 1967 |
|
SU224642A1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕЛЕЙНОЙ НЕТЛЕВОЙ ХАРАКТЕРИСТИКИ | 1969 |
|
SU253209A1 |
| Многоканальный импульсный регулятор | 1974 |
|
SU565283A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| Многоточечная релейно-импульсная система для автоматического регулирования параметров технологического процесса | 1979 |
|
SU962840A1 |
| КВАЗИКОГЕРЕНТНЫЙ МОДУЛЯТОР СИГНАЛОВ КВАДРАТУРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2581646C1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Многоточечная релейно-импульсная система для регулирования параметров технологического процесса | 1980 |
|
SU968782A2 |
| Многопороговый релейный элемент с опережающей характеристикой | 1986 |
|
SU1378034A1 |