Способ преобразования сигнала переменного тока с использованием синхронного детектирования и с применением модуляторов и демодуляторов в качестве множительных устройств известен.
С целью получения сигнала постоянного тока, пэличина и знак которого определяются скоростью и направлением вращения, например, двухфазной синхронной тахомашины, предлагается напряясение первой ее фазы умножить на синус угла поворота ротора, а напряжение второй фазы - на косинус угла путем подачи напряжений через модуляторы на соответствующие фазочувствительные выпрямители, причем в качестве их опорных напряжений используют сигнал с датчика положения, связанного с валом тахомашины, в воздушном зазоре которого создают эллиптическое вращающееся поле с соотнощением полуосей, равным половине, а напряжения с выходов двух фазочувствительных выпрямитe eй суммируют.
При жестких требованиях бесконтактного преобразования этот способ позволяет сравнительно просто осуществить получение постоянного сигнала, знак которого соответствует направлению вращения тахомащины переменного тока, а величина пропорциональна скорости вращения, которая может изменяться в широких пределах.
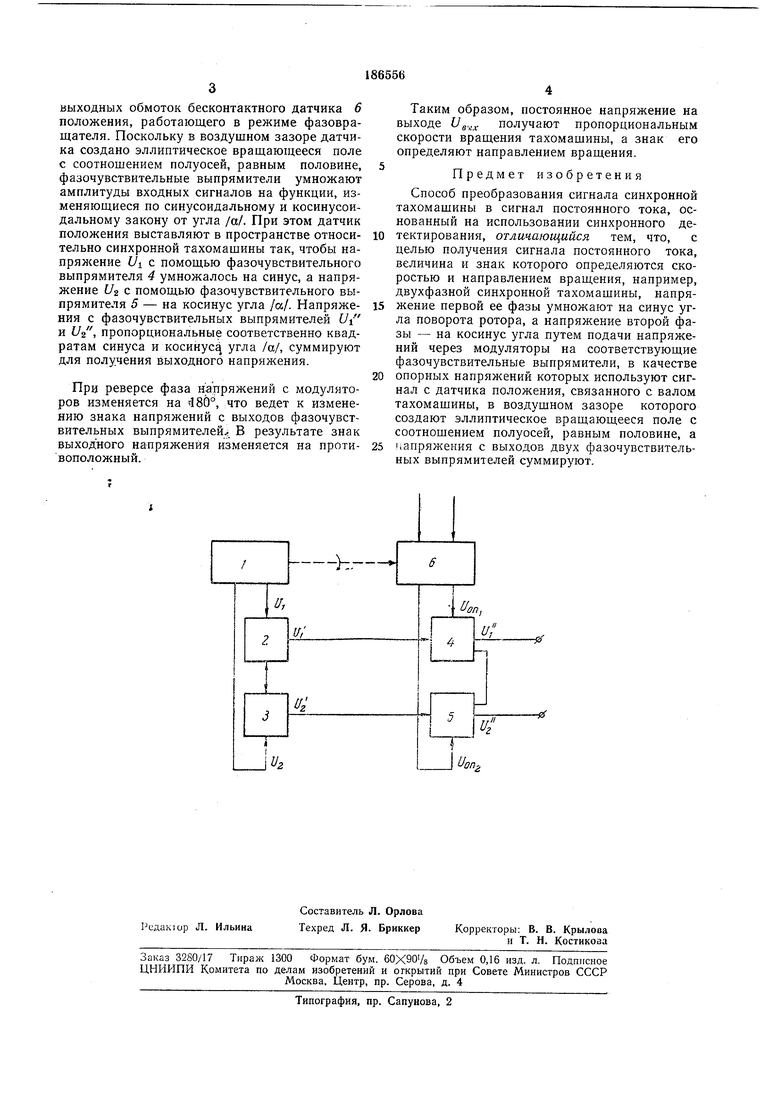
Способ состоит Б том, что, например, при двухфазном исполнении синхронной тахомашины напряжение первой фазы ее умножают на синус угла /а/ поворота ротора тахомашины, а напряжение второй фазы умножают на косинус угла /а/, а затем оба напряжении суммируют. Для умножения на синус и косинус угла /а/ напряжение с каждой фазы тахомащины подают через модуляторы на соответствующие фазочувствительные выпрямители, а в качестве их опорных напряжений используют напряжения с бесконтактного датчика положения, связанного с валом тахомашины. В воздущном зазоре датчика положения создают эллиптическое вращающееся поле опорной частоты с соотнощением полуосей, равным половине. Напряжения с выходов обоих фазочувствительных выпрямителей суммируют. На чертеже показана блок-схема, нллюстрирующая возможную реализацию описываемого способа.
Напряжения Ui и U двухфазной синхронной тахомашины / подают на модуляторы 2 и 3, которые запитываются опорным напряжением одинаковой фазы. Промодулнрованные напряжения bl и U-2 поступают затем на два фазочувствительных выпрямителя 4 и 5, которые запитываются опорными напряжениями , и Lcn,- Их снимают с двух сдвинутых отвыходных обмоток бесконтактного датчика 6 положения, работающего в режиме фазовращателя. Поскольку в воздушном зазоре датчика создано эллиптическое вращающееся поле с соотношением полуосей, равным половине, фазочувствительные выпрямители умножают амплитуды входных сигналов на функции, изменяющиеся по синусоидальному и косинусоидальному закону от угла /а/. При этом датчик положения выставляют в пространстве относительно синхронной тахомашины так, чтобы напряжение Ui с помощью фазочувствительного выпрямителя 4 умножалось на синус, а напряжение t/2 с помощью фазочувствительного выпрямителя 5 - на косинус угла /а/. Напряжения с фазочувствительных выпрямителей Ui и t/2, пропорциональные соответственно квадратам синуса и косинусу угла /а/, суммируют для получения выходного напряжения.
При реверсе фаза напряжений с модуляторов изменяется на 480°, что ведет к изменению знака напряжений с выходов фазочувствительных выпрямителей.. В результате знак выходного напряжения изменяется на противоположный.
ч
lU,
Таким образом, постоянное напряжение на выходе f/ev,. получают пропорциональным скорости вращения тахомащины, а знак его определяют направлением вращения.
Предмет изобретения
Способ преобразования сигнала синхронной тахомашины в сигнал постоянного тока, основанный на использовании синхронного детектирования, отличающийся тем, что, с целью получения сигнала постоянного тока, величина и знак которого определяются скоростью и направлением вращения, например, двухфазной синхронной тахомашины, напряжение первой ее фазы умножают на синус угла поворота ротора, а напряжение второй фазы - на косинус угла путем подачи напряжений через модуляторы на соответствующие фазочувствительные выпрямители, в качестве
опорных напряжений которых используют сигнал с датчика положения, связанного с валом тахомашины, в воздушном зазоре которого создают эллиптическое вращающееся поле с соотнощением полуосей, равным половине, а
напряжения с выходов двух фазочувствительных выпрямителей суммируют.
af
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ РЕВЕРСИРУЕМБШ РЕГУЛИРУЕМЫЙПРИВОД | 1969 |
|
SU253226A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| ЭЛЕКТРОПРИВОД С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2101845C1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| РЕВЕРСИВНЫЙ БЕСКОНТАКТНЫЙ ТАХОГЕНЕРАТОР | 1966 |
|
SU187878A1 |
| ПРЕОБРАЗОВАТЕЛЬ СИГНАЛОВ СИНУСНО-КОСИНУСНОГО ДАТЧИКА В ФАЗОВЫЙ СДВИГ | 1973 |
|
SU404110A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| БЕСКОНТАКТНЫЙ РЕВЕРСИВНЬШ РЕДУКТОРНЫЙ ТАХОГЕНЕРАТОР | 1971 |
|
SU432389A1 |
| Вентильный электродвигатель | 1980 |
|
SU964882A1 |
