Изобретение относится к области автоматического регулирования, а более конкретно, к следящим электроприводам на основе бесконтактных моментных электродвигателей и может быть использовано в следящих приводах манипуляторов, промышленных установок и т.д.
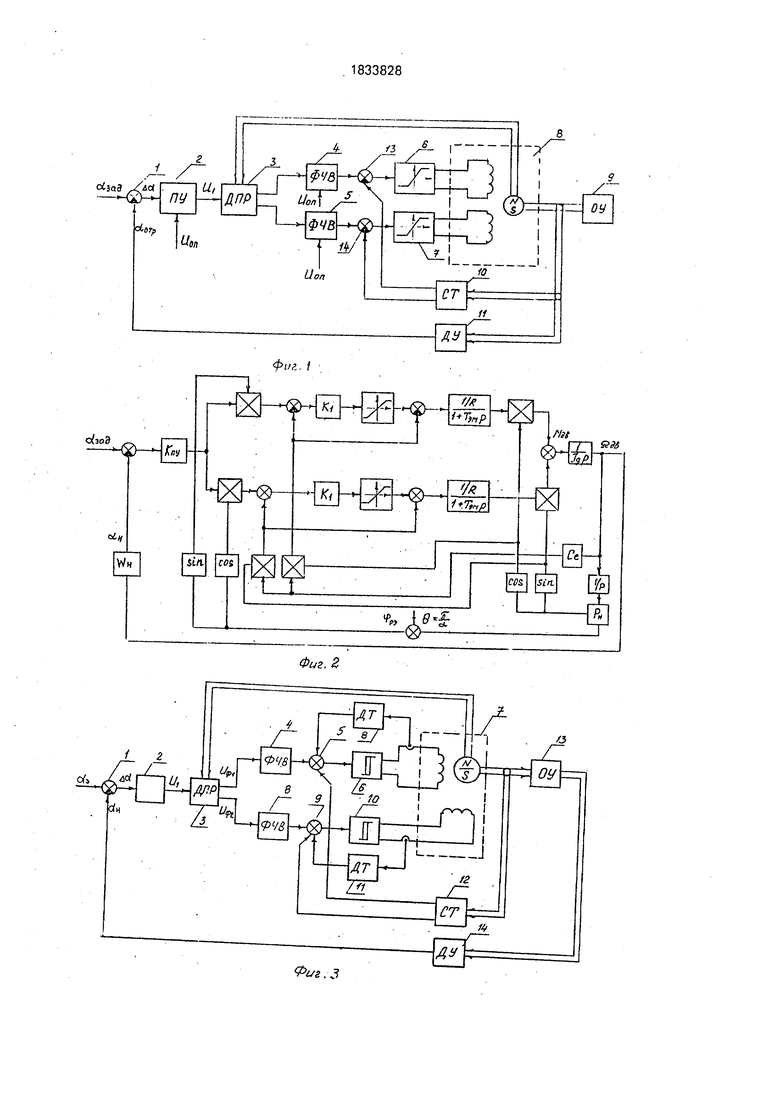
Известны бесконтактные моментные приводы на основе синхронных двигателей типа ДБМ, реализованные по схеме, приведенной на фиг.1. Такой привод содержит последовательно соединенные первый сумматор 1, предварительный усилитель 2, датчикположенияротора 3, фазочувствительные выпрямители фазных напряжений 4, 5, усилители мощности 6, 7, электродвигатель 8, объект управления 9, синхронный тахогенератор 10, датчик угла выходного вала 11, второй и третий сумматоры цепей скоростной обратной связи 13, 14.
Работает рассматриваемый электропривод следующим образом. Сигнал задающего угла «зад сравнивается на сумматоре 1 с углом Cfotp., измеряемым датчиком угла 11, и поступает на предварительный усилитель-модулятор, где усиливается и модулируется. Модулированный с частотой опорного напряжения Don сигнал с выхода предварительного усилителя Ui поступает на обмотку возбуждения датчика положения ротора (ДПР) 3, непосредственно связанного с ротором исполнительного двигателя 8. Датчик положения ротора раскладывает управляющий сигнал на синусную и косинусную составляющие, которые после фазочувствительного выпрямления с помощью ФЧВ 4, 5, суммирования с сигналами фазных скоростей на сумматорах 13, 14, измеряемых синхронным тахогенерато- ром 10, и усиления усилителями мощности 6, 7 управляют фазными обмотками статора
s
Ё
СО
00 00
со о со
электродвигателя 8, вызывая поворот статора на угол, обеспечивающий уменьшение ошибки слежения Да.
Структурная схема, соответствующая рассматриваемой системы, приведена на фиг.2. Следует отметить, что обратные связи по скорости могут быть заведены как в цепи управления фазных обмоток, с помощью синхронного тахогенератора, так и во внешний контур с помощью обычного тахогенератора.Согласноправилам преобразования структурных схем, такое введение скоростных СС является эквивалентным.
Известны также электроприводы постоянного тока со скользящими режимами работы, в которых линеаризация характеристики релейного усилителя мощности осуществляется введением высокоча- стотных автоколебаний по току соответствующей обмотки, например, току якорной цепи.
Этот же принцип может быть использован при управлении двухфазными двигателями, при этом заводятся обратные связи по токам фазных обмоток.
За прототип принят следящий электропривод на основе двухфазного синхронного двигателя с релейным управлением по фазным обмоткам, токовыми и скоростными об- ратными связями по синусному и косинусному каналам.
Функциональная схема такого электропривода приведена на фиг.З, структурная схема - на фиг.4.
Схема электропривода-прототипа включает в себя (фиг.З) последовательно включенные первый сумматор 1, предварительный усилитель-модулятор 2, выход которого подключен к обмотке возбуждения датчика положения ротора 3, первый выход которого соединен со входом фазочувстви- тельного выпрямителя 4, выход которого соединен с первым входом второго сумматора 5, выход которого подключен ко входу релейного усилителя мощности 6. Выход усилителя 6 соединен с первой фазной обмоткой исполнительного двигателя 7, с которой соединен вход датчика тока 8. выход которого соединен со вторым входом второго сумматора 5. Второй выход датчика положения ротора 3 соединен с входом фа- зочувствительного выпрямителя 8, выход которого соединен с первым входом третьего сумматора 9, выход которого подключен к входу релейного усилителя мощности 10. выход которого соединен со второй фазной обмоткой исполнительного двигателя 7, с которой соединен датчик тока 11, выход ко.0
5
0
5
0
5
0
5
0
5
торого соединен со вторым входом третьего сумматора 9.
Выходной вал электродвигателя 7 механически соединен с синхронным тахогене- ратором 12, 1-й и 2-й выходы которого подключены к третьим входам второго 5 и третьего 9 сумматоров, а также с ротором датчика положения ротора 3 и нагрузкой 13, выходной вал которой через датчик угла 14 соединен со вторым входом первого сумматора 1.
Работает электропривод-прототип следующим образом. Разность сигналов задающего угла «э и угла поворота нагрузки а, а3 - а - Да после усиления и модуляции поступает на обмотку возбуждения ДПР 3, ротор которого связан с ротором электродвигателя 7. С синусной и косинусной обмоток ДПР 3 снимаются электрические сигналы, пропорциональные фазным значениям сигнала угла рассогласования (сигнала ошибки). Эти сигналы суммируются с сигналами токовых обратных связей и обратных связей по фазным скоростям вращения ротора электродвигателя, измеряемым синхронным тахогенератором12.
В контуре каждой фазной обмотки электродвигателя формируется реальный скользящий режим с функциями переключения
So KiAltyn-fcUQj-Ui,
S,j 2 KiAUp2-K2UЈb-Ui2. где AU . Ди - сигналы угловых фазных рассогласований;
U QI . U Q сигналы фазных скоростей электродвигателя;
UH , Ui2 - сигналы фазных токов. Моменты, создаваемые статорными обмотками электродвигателями, суммируются, поворачивая его ротор в сторону уменьшения ошибки слежения Да.
Недостатком привода-прототипа является то, что при малых рассогласованиях обмотка возбуждения датчика положения ротора запитывается напряжение малой амплитуды, при этом сигналы синусной и коси- нусной обмоток, необходимые для управления статорными обмотками электродвигателя, существенно искажены.
Таким образом, точность слежения такого электропривода ограничена уровнем сигнала возбуждения ДПР, передаваемого без искажений. .
Увеличение коэффициента предварительного усилителя-модулятора 2 приводит, с одной стороны, к сужению зоны линейности привода по углу, а с другой - к неустойчивости системы в целом.
Кроме того, введение скоростной обратной связи требует применения низкооборотных тахомашин, не выпускающихся отечественной промышленностью, или установки повышенного приборного редуктора, усложняющего конструкцию и ухудшающего динамические свойства привода.
Цель изобретения - повышение точности слежения электропривода.
Указанная цель достигается тем, что в следящий электропривод, содержащий первый сумматор и предварительный усилитель-модулятор,соединенные последовательно, датчик положения ротора, первый выход которого соединен со вхо- дом первого фазочувствительного выпрямителя, выход которого подключен к первому входу второго сумматора, выход которого подключен к входу первого релейного усилителя мощности, выход которого связан с первой фазной обмоткой исполнительного двигателя, в качестве которого использована синхронная электрическая машина с независимым возбуждением, а также первый датчик тока, включенный между первой фазной обмоткой исполнительного двигателя и вторым входом второго сумматора, второй выход датчика положения ротора соединен со входом второго фазочувствительного выпрямителя, выход которого соединен с первым входом третьего сумматора, выход которого подключен ко входу второго релейного усилителя мощности, выход которого соединен со второй фазной обмоткой исполнительного двигателя, с которой соединен второй датчик тока, выход которого соединен со вторым входом третьего сумматора, выходной вал двигателя соединен с ротором датчика положения ротора и с объектом управления, выходной вал которого через датчик угла соединен с первым входом первого сумматора, в отличие от известного, введены ре- лейный элемент и последовательно соединенные третий фазочувствительный выпрямитель, апериодическое звено, интегрирующее звено, четвертый сумматор и фильтр, выход апериодического звена подключен ко второму входу четвертого сумматора, выход фильтра подключен ко второму входу перво/о сумматора, вход релейного элемента соединен с выходом усилителя- модулятора, а выход - с обмоткой возбуждения датчика положения ротора и входом третьего фазочувствительного выпрямителя.
Повышение точности слежения достигается за счет исключения передачи сигналовмалойамплитудысусилителя-модулятора на обмотку возбуждения датчика положения ротора (ДПР), что
позволяет ликвидировать зону нечувствительности привода, обусловленную электрическими характеристиками цепи обмотки возбуждения ДПР.
В предлагаемом электроприводе обмотка возбуждения запитывается широтно- частотно-модулированными сигналом постоянной амплитуды, дополнительно модулированным частотой возбуждения ДПР.
Предлагаемый электропривод включает в себя (фиг.5) последовательно соединенные 1-й сумматор 1 и предварительный усилитель-модулятор 2, а также датчик положения ротора 3, первый выход которого соединен со входом фазочувствительного выпрямителя (ФЧ8) 4. Выход ФЧВ 4 подключен к первому входу второго сумматора 5, выход которого подключен ко входу первого релейного усилителя мощности 6. выход которого соединен с первой фазной обмоткой исполнительного двигателя 7, с которой соединен вход датчика 8. Выход датчика тока 8 соединен со вторым входом второго сумматора 5.
Второй выход датчика положения ротора 3 соединен со входом второго фазочувствительного выпрямителя 9, выход которого соединен с первым входом третьего сумматора 10. Выход сумматора 10 подключен ко входу второго релейного усилителя мощности 11. Выход усилителя мощности 11 соединен со второй фазной обмоткой исполнительного двигателя 7, с которой соединен датчик тока 12, выход которого соединен со вторым входом третьего сумматора 10. Выходной вал электродвигателя 7 соединен с ротором датчика положения ротора 3 и объектом управления 13, выходной вал которого через датчик угла 14 соединен со вторым входом первого сумматора 1.
Кроме того, привод содержит последовательно соединенные третий фазочувствительный выпрямитель 15, апериодическое звено 16, интегрирующее звено 17, сумматор 18 и фильтр 19. Выход апериодического звена 16 подключен ко второму входу сумматора 18. Выход фильтра 19 подключен к третьему входу первого сумматора 1. Привод содержит также релейный элемент 20, вход которого соединен с выходом усилителя-модулятора 2, а выход - с обмоткой возбуждения датчика положения ротора 3 и входом третьего фазочувствительного выпрямителя 15.
Работает предлагаемый электропривод следующим образом.
При подаче на первый вход первого сумматора 1 сигнала задающего угла Оз формируется сигнал ошибки слежения, который суммируется с колебаниями, возникающими в контуре, образованном первым сумматором 1, усилителем-модулятором 2, релейным элементом 20, апериодическим и интегрирующим звеньями 16,17ифильтром 19. При этом, настройка контура электропривода, охваченного обратной связью по положению ротора, производится по принципу максимального быстродействия на апериодический переходный процесс при отработке входного сигнала контура. Приближенно, этот контур может рассматриваться, в целом, как апериодическое звено с некоторой постоянной времени Тэ.
Постоянная времени апериодического звена 16 выбирается ТМ1 « Тэ, при этом сигнал на выходе апериодического и интегрирующего звеньев 16, 17 близок к сигналу скорости вала электродвигателя. Рассматривая контур электродвигателя с датчиком положения ротора 3 как апериодическое звено, можно, в соответствии с 3, сформировать скользящий режим в контуре, это звено охватывающем. Функция переключения (скольжения) такого привод может быть записана в виде:
Us Ki3U Да -U да Фильтр Л/ф отсекает низкие частоты в цепи обратной связи и тем самым обеспечивает инвариантность к параметрам задающего сигнала аз.
Предлагаемое техническое решение, по сравнению с прототипом, обеспечивает повышение точности слежения электропривода за счет исключения зоны нечувствительности датчика положения ротора. Высокие точностные характеристики привода обеспечиваются при частотах задающего сигнала значительно меньших частоты автоколебаний в контуре, образованном элементами управления.
Формула изобретения
Следящий электропривод, содержащий последовательно соединенные первый сумматор, первый вход которого является входом электропривода, и усилитель-модулятор, а также датчик положения ротора, первый выход которого подключен к последовательно соединенным первому фазочув- ствительному выпрямителю, второму сумматору, первому релейному усилителю мощности, выход которого подключен к первой фазной обмотке исполнительного двигателя, связанной с первым датчиком тока исполнительного двигателя, выход которого соединен с вычитающим входом второго сумматора, второй выход датчика положения ротора подключен к последовательно.
соединенным второму фазочувствительно- му выпрямителю, третьему сумматору и второму релейному усилителю мощности, выход которого соединен с второй фазной обмоткой исполнительного двигателя, вычитающий вход третьего сумматора соединен с выходом второго датчика тока, связанного с второй фазной обмоткой исполнительного двигателя, ротор которого механически связан с датчиком положения ротора и с объектом управления, выходной вал которого через датчик угла соединен с первым вычитающим входом первого сумматора, отличающийся тем, что, с целью повышения точности электропривода, в него введены
релейный элемент, интегрирующее звено, последовательно соединенные третий фазо- чувствительный выпрямитель, апериодическое звено, четвертый сумматор, низкочастотный фильтр, выход которого соединен с вторым вычитающим входом первого сумматора, а выход апериодического звена соединен через интегрирующее звено с вторым входом четвертого сумматора, выход усилителя-модулятора через релейный
элемент соединен с входами датчика положения ротора исполнительного двигателя и входом третьего фазочувствительного выпрямителя.
и,
А- I
3/ /--Z-1
11хтН гхН ГГ j
Л Г70 УЛ ТJ I Г
/:
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2629946C1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
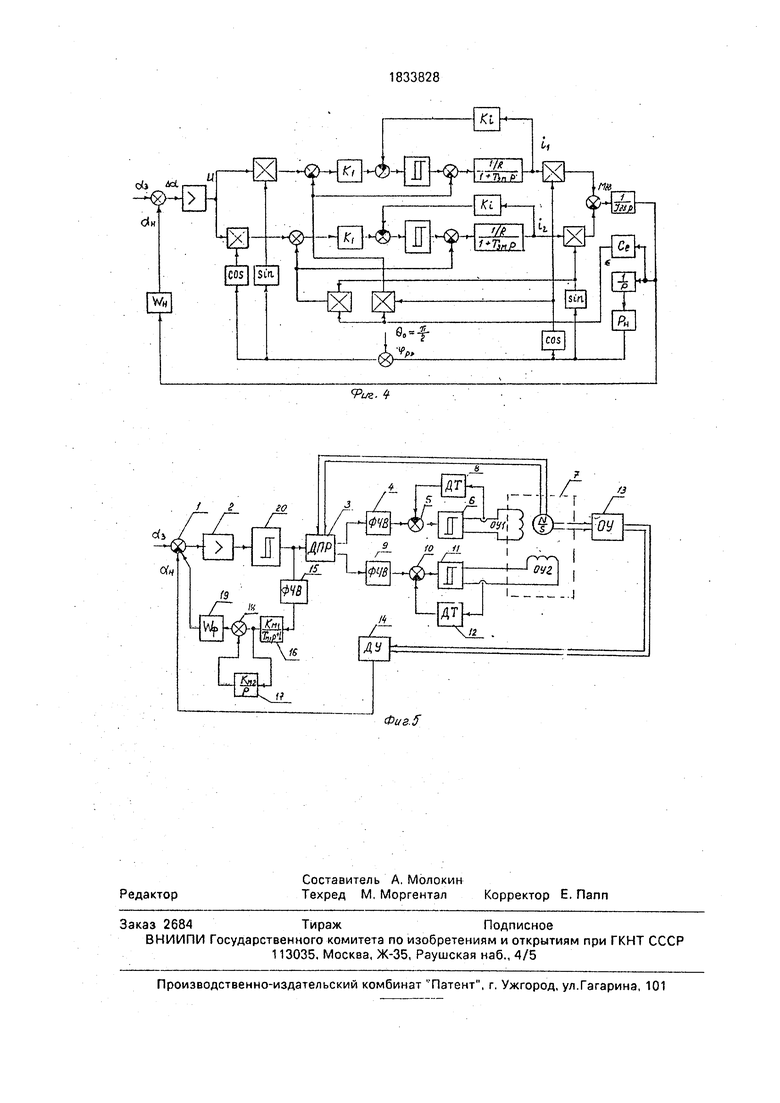
Изобретение относится к автоматическому регулированию, к следящим электроприводам на основе бесконтактных моментных электродвигателей и может быть использовано в следящих приводах манипуляторов, промышленных установок и т.д. Следящий электропривод содержит три сумматора 1, 5, 10, 18, предварительный усилитель-модулятор 2, датчик положения ротора 3, три фазочувствительных выпрямителя 4,9,15, два релейных усилителя мощности 6. 11, исполнительный двигатель 7, два датчика тока 8, 12, объект управления 13, датчик угла 14, апериодическое звено 16, интегрирующее звено 17, низкочастотный фильтр 19. 1-2-20-3-4-5-6-7- 13-14-1,7-8-5,7-3, 3-9-10-11-7, 7-12-10.20- 15-16-18-19-1, 16-17-18. Бил.
Фиг.-З
ob t
Ц
X - ч9 -4 Г|-Ф- Я -н2К
г
Л/7Р
®
(О .11
Г
- H-HsWrT
/ т
«
it
V/L
л
г
/з
(О .11
Г
rT
/:
л
./г
| Беленький Ю.М | |||
| и др | |||
| Опыт разработки и применения бесконтактных моментных приводов | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Михалев А.С., Миловзоров В.П | |||
| Следящие системы с бесконтактными двигателями постоянного тока | |||
| М.: Энергия, 1979. | |||
