Изобретение относится к области ядерной э.нергетЕки и ;может быть использовано для любых систем перегрузки.
Известно манипулирующее приспособление подобного типа, содержащее подвешенный заХ1ват, управляемый с помощью относительного перемещения двух цепей.
Однако iB известном устройстве управление захватом осуществляется с помощью фрикционов, что не позволяет постоянно контролировать состояние захвата и не исключает его самопроизвольного открываиия или закрывания в случае повыщения сопротивлевия перемещению цепей в одной «з улиток.
Описываемое изобретение позволяет постоянно .контролировать положение захвата, исключает возможность его са1мопроиз:вольного открывания и закрывания, а также позволяет точно контролировать усилия «а захвате.
Это достигается тем, что один «з червяков червячной передачи выполнен перемещающимся по направляющей шпонке вдоль оси несущего его вала; каждое из колес дифференциала соединено с вилкой, охватывающей конец крестовины водила, с зазором между концом крестовины и вилкой, величина которого выбрана соответственно максимальной неравномерности перемещения цепей, а в кинематическую схему устройства включен механизм компенсации веса цепей и ограничения усилий толкания.
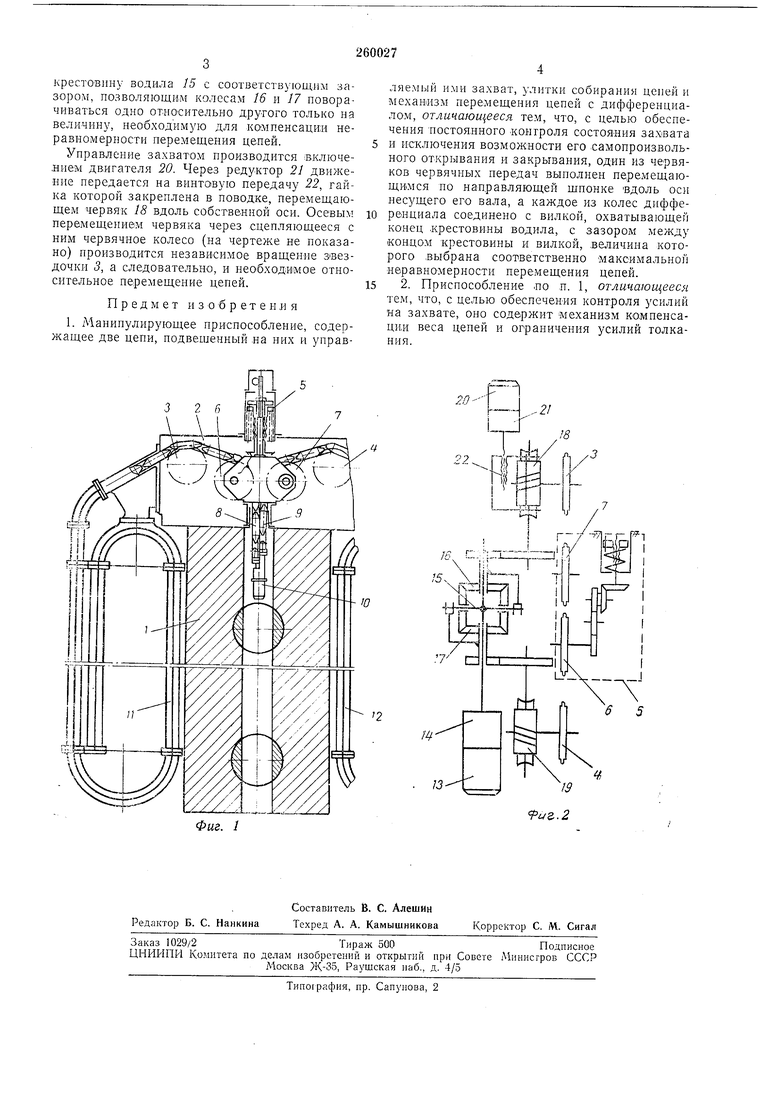
На фиг. 1 изображено описываемое приспособление, разрез по вертикали; на фиг. 2 - его кинематическая схема.
Приспособление устанавливается на корпусе контейнера 1 и состоят из привода 2 с двумя ведущими звездочками 3 ,и 4, механизма 5 ограничения усилий с промежуточными звездочками 6 и 7, цепей 8 и 9 одностороннего изгиба, дистанционно управляемого захвата 10 и улиток 11 и 12.
Механизм перемещения цепей (см. фиг. 2) содержит двигатель 13, редуктор 14, конический дифференциал с водилом 15 и выходными колесами 16 и 17, червяки 18 и 19, двигатель 20, редуктор 21 и Бинтовую передачу 22.
Механизм перемещения работает следующим образом.
От двигателя 13 через редуктор 14 движение
передается на водило 15 конического дифференциала, от него - на выходные колеса 16 и 17, а затем через червяки 18 и 19 - на ведущие звездочки 3 и 4 соответственно. Конический дифференциал автоматически
уравнивает усилия в цепях л компенсирует неравномерность их перемещения. Для устранения самопроизвольного открывания и закрывания захвата в коническом дифференциале предусмотрено ограничение относительного
крестовину водила 15 с соответствующим зазором, позволяющим колесам 16 и 17 поворачиваться одно относительно другого только на величину, необходимую для компенсации неравномерности перемещения цепей.
Управление захватом производится включением двягателя 20. Через редуктор 21 движение передается на винтовую передачу 22, гайка которой закреплена в поводке, перемещающем червяк 18 вдоль собственной оси. Осевым перемещением червяка через сцепляющееся с ним червячное колесо (на чертеже не показано) производится независимое вращение звездочки 3, а следовательно, и необходимое относительное перемещение цепей.
Предмет изобретения
1. Манипулирующее приспособление, содержащее две цепи, подвещенный ,на них и управляемый ими захват, улитки собирания цеией и механизм перемещения цепей с дифференциалом, отличающееся тем, что, с целью обеспечения постоянного -контроля состояния захвата и исключения возможности его -самопроизвольного открывания и закрывания, один из червяков червячных передач выполнен перемещающимся по направляющей щпонке вдоль оси несущего его вала, а каждое из колес дифференциала соединено с вилкой, охватывающей конец .крестовины водила, с зазором между концом крестовины и вилкой, .величина которого выбрана соответственно максимальной неравномерности перемещения цепей.
2. Приспособление по п. 1, отличающееся тем, что, с целью обеспечения контроля усилий на захвате, оно содержит механизм компенсации веса цепей и ограничения усилий толкания.
|F ...
i J
.J .H
3
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1983 |
|
SU1113973A1 |
| Загрузочное устройство для проявочной машины непрерывного действия | 1988 |
|
SU1580313A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Привод клуппных цепей ширильной машины | 1982 |
|
SU1130630A1 |
| Мерное приспособление к гусеничным тракторам для посева пропашных культур различными способами без мерной проволоки | 1956 |
|
SU119385A1 |
| ПРИВОД ВАЛА ОТБОРА МОЩНОСТИ ТРАКТОРА С РЕГУЛИРУЕМОЙ ЧАСТОТОЙ ВРАЩЕНИЯ | 1993 |
|
RU2080035C1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2010 |
|
RU2442715C1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ СТВОРОК ВОРОТ | 2012 |
|
RU2499872C1 |
| Резервированный следящий электрический привод | 2020 |
|
RU2750811C1 |
