Изобретение относится к грузоподъемным устройствам, в частности к манипуляторам с ручным управлением, предназначенным для механизации работ, например, при установке (снятии) приборов на ступенях ракетоносителя, и может найти применение в различных отраслях промышленности при проведении погрузочно-разгрузочных работ.
Известен сбалансированный манипулятор с ручным управлением, содержащий основание, основную стрелу, шарнирно установленную на основании и выполненную в виде шарнирно-рычажного параллелограмма, входное звено которого имеет направляющие, в которых установлен противовес, и захватное устройство. Этот манипулятор снабжен вторым захватным устройством, дополнительной стрелой, выполненной также в виде шарнирно-рычажного параллелограмма, втулкой, шарнирно соединенной с двумя боковыми рычагами этого параллелограмма и шарнирно установленной на выходном звене параллелограмма основной стрелы, а также рукояткой управления, кинематически связанной с противовесом. При этом на каждом из двух других параллельных рычагов дополнительной стропы жестко установлено соответствующее захватное устройство (пат. РФ №1468739, кл. B25J 1/00, опубл. 30.03.1989). Недостатком этого манипулятора является сложная конструкция его шарнирно-рычажной системы и невысокая надежность их работы.
Известно также ручное манипулирующее устройство, содержащее основную штангу с рукояткой и захватное устройство с зажимными рычагами и приводом их сведения. Оно снабжено дополнительной штангой, шарнирно связанной с основной, и приводом ее поворота, выполненным в виде червячного редуктора, корпус которого жестко связан с основной штангой, а червяк посредством гибкого вала связан с соответствующим элементом ручного управления. Причем захватное устройство выполнено в виде цилиндрического полого корпуса, закрепленного на дополнительной штанге и внутри которого на смонтированном кронштейне установлена с возможностью вращения втулка с выполненными на ней разнонаправленными нарезками под винты с коническими хвостовиками (А.с. СССР №1214406, кл. B25J 1/02, B25J 11/00, бюл. №8 от 28.02.1986). К основному недостатку такого манипулятора следует отнести недостаточную надежность работы его механизмов, их большой вес и габариты.
Наиболее близким к предлагаемому изобретению является известный манипулятор, содержащий установленную на монорельсе каретку с закрепленной на ней рычажно-шарнирной рукой, последовательно соединенные рычаги которой расположены со смещением один относительно другого в вертикальной плоскости и кинематически связанные между собой, захват, шарнирно соединенный с конечным звеном руки, и привод подъема захвата, закрепленный на каретке. При этом кинематическая цепь связи рычагов включает зубчато-реечные передачи с двумя секторами и механизмами выборки зазоров в этих передачах, число которых соответствует числу рычагов, а в каждом рычаге выполнена полость, имеющая конические поверхности, при этом механизм выборки зазоров выполнен в виде подпружиненного конического ползуна с роликом и размещен соответственно между конической поверхностью рычага и нерабочей поверхностью зубчатой рейки (А.с. СССР №1425075, кл. B25J 1/02, бюл. №35 от 23.09.1988).
Несмотря на положительные качества известного устройства, взятого за прототип, касающиеся повышения точности позиционирования путем увеличения жесткости в кинематической цепи связи рычагов, ему присущи и недостатки, заключающиеся в сложности конструкции, невысокой производительности труда, недостаточной надежности в работе и низкого уровня безопасности проведения погрузочно-разгрузочных операций.
Задачей заявляемого изобретения является повышение производительности труда и безопасности при работе обслуживающего персонала и устанавливаемых приборов за счет сокращения ручного труда при установке (снятии) приборов, повышение сохранности дорогостоящих приборов и оборудования ракетоносителя (РН).
Поставленная задача решается за счет того, что в подвесном манипулирующем устройстве с ручным управлением, включающем в себя механизм перемещения в виде каретки с четырьмя роликами-катками, подвешенный за вилку корпуса на крюке подъемного крана и консольно присоединенный к силовой стойке, выполненной в виде полой призматической конструкции, в нижней части которой закреплен механизм подъема, захватное устройство, размещенное на конце механизма вращения, элементы ручного управления в виде верхнего, среднего и нижнего маховичков и элементы крепления, согласно изобретению в корпус механизма перемещения, выполненный в виде короба с продольным вырезом и направляющими, встроена винтовая передача, состоящая из опорного вала, нижней приводной звездочки, связанной цепью с верхней приводной звездочкой, жестко соединенной с приводным винтом, находящимся в зацеплении с гайкой, шарнирно закрепленной на вилке. Винтовая пара преобразует вращение среднего маховичка в поступательное движение каретки с возможностью обеспечения перемещения манипулирующего устройства вдоль горизонтальной оси. А механизм подъема выполнен в виде цилиндра со штоком, внутрь которого вмонтирована червячно-винтовая пара, преобразующая вращение верхнего маховичка в поступательное движение штока в цилиндре с возможностью обеспечения перемещения манипулирующего устройства вдоль вертикальной оси. При этом механизм вращения, жестко связанный со штоком цилиндра механизма подъема, выполнен в виде соединенных в общем корпусе двух редукторов, один из которых червячный, а другой - конический. Последний скреплен нижней стороной конического колеса с захватным устройством, выполненным в виде планшайбы, на которой закреплена приборная рамка. Причем механизм вращения преобразует вращение нижнего маховичка во вращательное движение планшайбы с рамкой в вертикальной плоскости.
Манипулирующее устройство снабжено защитными кожухами, выполненными в виде изогнутых пластин, закрепленных на силовой стойке и ограждающих цепь с обеспечением безопасности работы обслуживающего персонала.
Также манипулирующее устройство снабжено ограничителем прогиба цепи, выполненным в виде механизма со встроенными направляющими, препятствующими срыву звеньев цепи с приводных звездочек.
Кроме того, манипулирующее устройство снабжено механизмом установки приводной звездочки, выполненным в виде сварного короба с двумя сквозными отверстиями и обеспечивающим передачу тягового усилия от нижнего маховичка через цепь к приводной звездочке, жестко соединенной с приводным винтом механизма перемещения.
Предлагаемое манипулирующее устройство иллюстрируется чертежами, на которых изображено:
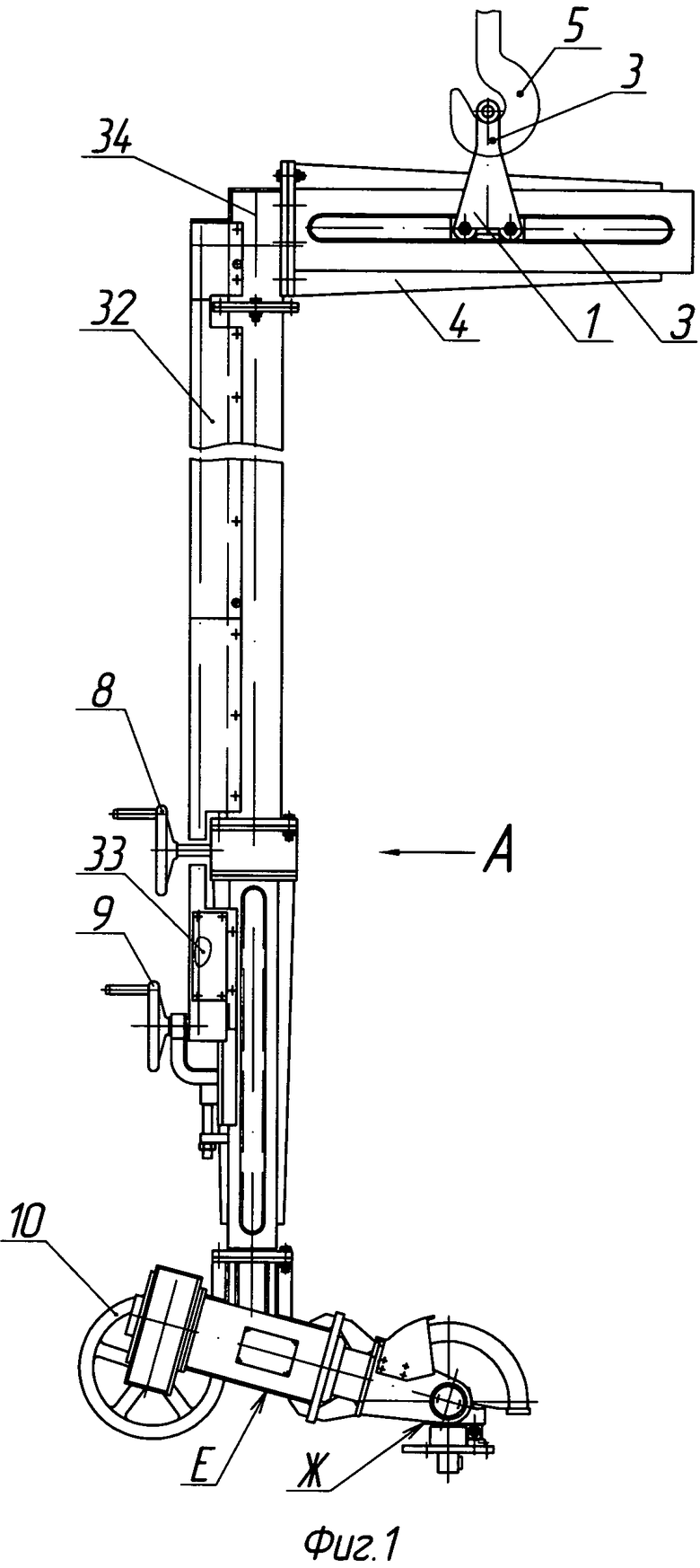
на фиг.1 - общий вид подвесного манипулирующего устройства в сборе;
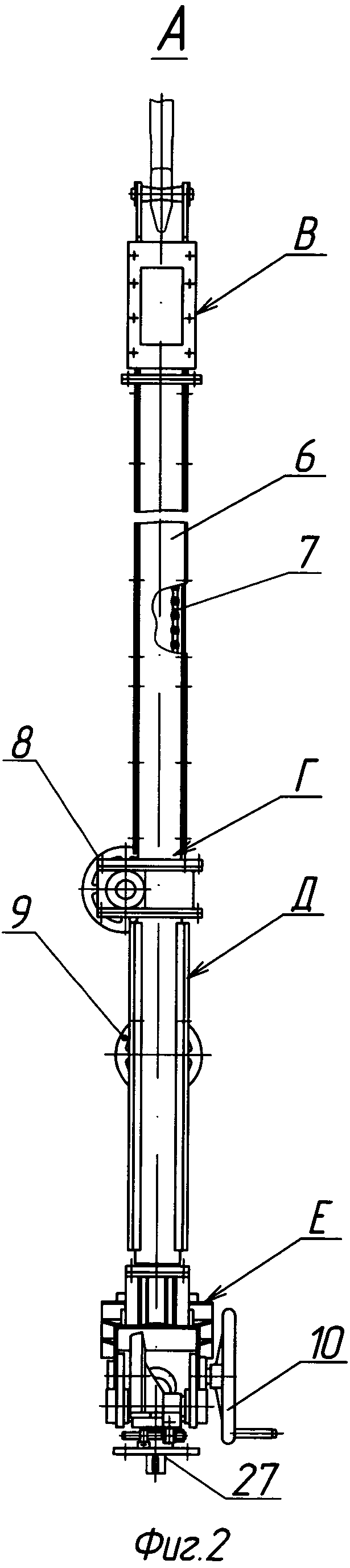
на фиг.2 - вид A фиг.1 (вид сбоку);
на фиг.3 - кинематическая схема манипулирующего устройства;
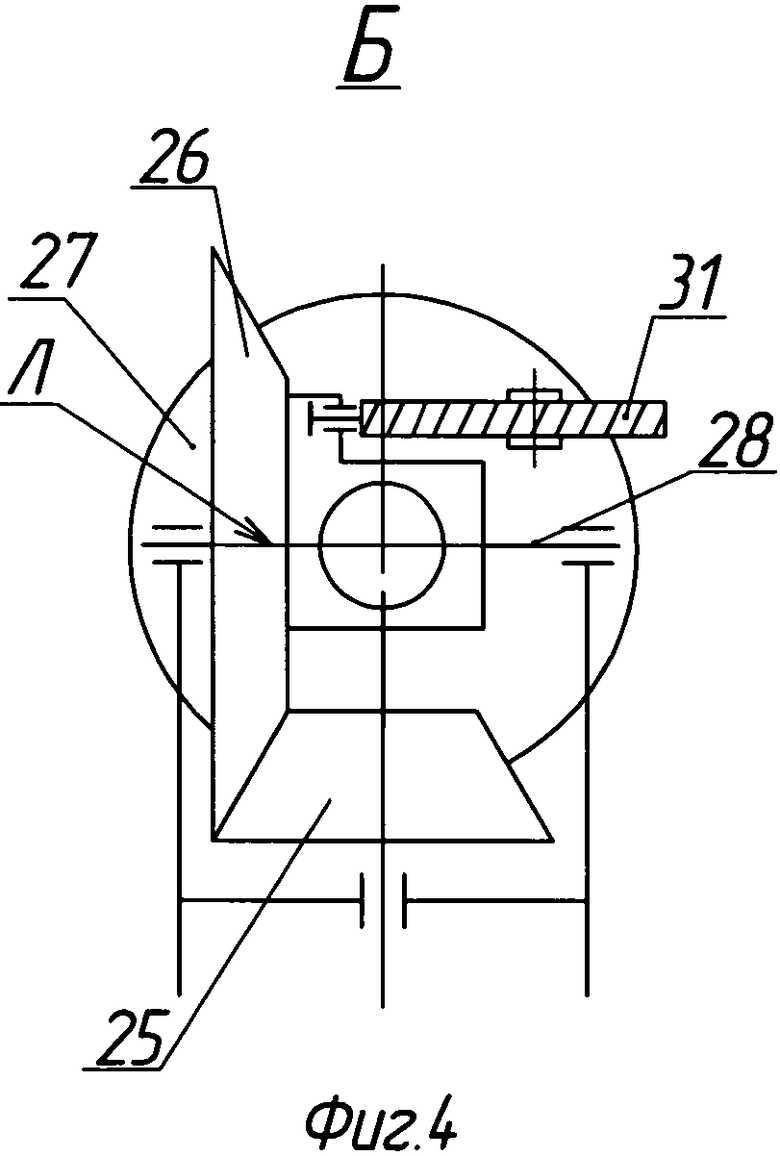
на фиг.4 - вид Б на фиг.3;
на фиг.5 - общий вид манипулирующего устройства с закрепленным на приборной рамке заменяемым прибором.
Заявляемое подвесное манипулирующее устройство с ручным управлением содержит выполненный в виде каретки 1 с четырьмя роликами-катками 2 механизм перемещения В, который подвешен за вилку 3 корпуса 4 на крюке 5 подъемного крана. Механизм перемещения В консольно присоединен к силовой стойке 6, выполненной в виде полой призматической конструкции, к нижней части Г которой прикреплен механизм подъема Д, связанный цепью 7 с механизмом перемещения. Манипулирующее устройство также включает в себя механизм вращения Е с расположенным на его конце захватным устройством Ж, элементы ручного управления в виде верхнего 8, среднего 9 и нижнего 10 маховичков, а также элементы крепления (которые на чертежах условно не показаны).
В корпус 4 механизма перемещения В, который выполнен в виде сварного короба с продольным вырезом 3 и направляющими, встроена винтовая передача И, состоящая из опорного вала 11, нижней приводной звездочки 12, связанной цепью 7 с верхней приводной звездочкой 13. Последняя жестко соединена с приводным винтом 14, находящимся в зацеплении с гайкой 15, шарнирно закрепленной на вилке 3. Винтовая передача И преобразует вращение среднего маховичка 9 в поступательное движение каретки 1 с обеспечением возможности перемещения всего манипулирующего устройства вдоль горизонтальной оси.
Механизм подъема Д, выполненный в виде сварного цилиндра 16 со штоком 17, снабжен расположенной в его верхней части червячно-винтовой парой К, вал-червяк 18 которой посредством червячного колеса 19 связан с тяговым винтом 20, шарнирно соединенным со штоком. При вращении верхнего маховичка 8 шток 17 плавно перемещается в цилиндре 16, что обеспечивает возможность перемещения всего манипулирующего устройства вдоль вертикальной оси, при этом сам механизм подъема Д остается неподвижен.
При этом поступательное движение штока 17 в цилиндре 16 передается механизму вращения Е, который жестко скреплен со штоком механизма подъема Д и выполнен в виде двух закрепленных в общем корпусе 21 и соединенных между собой редукторов. Один из них червячный имеет вал-червяк 22, который посредством червячного колеса 23 и опорного вала 24 передает вращательное движение нижнего маховичка 10 на коническую шестерню 25 конического редуктора, входящую в зацепление с коническим колесом 26. С нижней стороны конического колеса 26 закреплено захватное устройство Ж, выполненное в виде планшайбы 27, которая жестко закреплена на валу 28, который посредством двух роликоподшипников опирается на вилку корпуса 21. Планшайба 27, вращаясь относительно оси Л, совершает угловые перемещения с присоединенной к ней приборной рамкой 29. Для корректировки положения прибора 30 относительно его посадочного места на борту РН планшайба 27 имеет возможность совершать угловые перемещения относительно оси М путем вращения ключом винта 31, который, с одной стороны, шарнирно закреплен на коническом колесе 26, а с другой - на планшайбе 27.
На наружной поверхности металлоконструкции силовой стойки 6 закреплены защитные кожухи 32, выполненные в виде изогнутых пластин, ограждающих цепь 7 механизма подъема Д в целях обеспечения безопасности обслуживающего персонала в процессе проведения операций по замене приборов в отсеках РН.
Манипулирующее устройство снабжено ограничителем прогиба 33 цепи 7, выполненным в виде механизма со встроенными направляющими, препятствующими срыву звеньев цепи с приводных звездочек 12, 13.
Оно также снабжено механизмом установки 34 приводной звездочки 13, выполненным в виде сварного короба с двумя сквозными отверстиями, который обеспечивает передачу тягового усилия от среднего маховичка 9 через цепь 7 к приводной звездочке, жестко соединенной с приводным винтом 14 механизма перемещения В, и обеспечивает соединение последнего с силовой стойкой 6.
Подвесное манипулирующее устройство с ручным управлением работает следующим образом.
Приборная рамка 29 с установленным на ней прибором 30 подводится к соответствующему люку РН и ручными механизмами-маховичками 8, 9, 10 положение прибора постоянно уточняется. Затем рамка 29 с прибором 30 заводится в люк РН и механизмом вращения Е прибор разворачивается в пространстве таким образом, чтобы его посадочные отверстия расположились напротив посадочных отверстий на борту РН. Прибор 30 закрепляется вручную на посадочном месте штатным крепежом, а от приборной рамки 29 отсоединяется. Приборная рамка извлекается из внутреннего пространства РН при помощи манипуляций механизмами вращения Е, подъема Д и перемещения В, а именно:
Сначала вращением среднего маховичка 9 движение через опорный вал 11 передается на нижнюю приводную звездочку 12, которая через цепь 7 вращает верхнюю приводную звездочку 13, жестко соединенную с приводным винтом 14. В свою очередь, вращающийся винт 14, находясь в зацеплении с гайкой 15, шарнирно закрепленной на вилке 3, преобразует свое вращательное движение в поступательное движение каретки 1. Поскольку приводной винт 14 имеет только одну степень свободы, т.е. вращательную, то его поступательное движение в горизонтальной плоскости передается на весь механизм перемещения В. При этом сам механизм перемещения В движется относительно вилки 3 корпуса 4 посредством четырех роликов-катков 2, шарнирно закрепленных на вилке и упирающихся в специально созданную поверхность катания в корпусе механизма перемещения.
Затем вращением верхнего маховичка 8 движение передается на вал-червяк 18 червячно-винтовой пары К, который приводит в движение червячное колесо 19, зажатое в корпусе механизма подъема Д двумя шарикоподшипниками. В свою очередь, червячное колесо 19 связано с тяговым винтом 20 винтовой пары К, что приводит к поднятию либо опусканию тягового винта. Поскольку тяговый винт 20 шарнирно соединен со штоком 17, плавно перемещающимся в цилиндре 16, то его поступательное движение в вертикальной плоскости передается механизму вращения Е, жестко с ним связанному.
А вращением нижнего маховичка 10 движение передается на вал-червяк 22 червячного редуктора, который приводит в движение червячное колесо 23, зажатое в корпусе механизма вращения Е роликоподшипниками. В свою очередь, червячное колесо 23 через опорный вал 24 передает вращательное движение на коническую шестерню 25, входящую в зацепление с коническим колесом 26, жестко закрепленным на валу 28, который посредством двух роликоподшипников опирается на вилку корпуса 21 механизма вращения Е. При этом закрепленная с нижней стороны конического колеса 26 планшайба 27, вращаясь относительно оси Л, совершает угловые перемещения с присоединенной к ней приборной рамкой 29. Причем для корректировки положения прибора 30 относительно его посадочного места на борту РН, сама планшайба 27 имеет возможность совершать угловые перемещения относительно оси М путем вращения специальным ключом винта 31.
Использование данного изобретения при проведении операций по установке (снятию) приборов весом более 10 кг на первой, второй и третьей ступенях РН через люки или с торца ступени позволяет:
- сократить ручную работу по установке и снятию приборов и, следовательно, повысить сохранность приборов, а также дорогостоящего оборудования РН;
- повысить производительность труда, надежность в работе и безопасность обслуживающего персонала при установке и снятии приборов;
- обеспечить изготовление манипулирующего устройства из рядовых и недорогих видов проката и марок сталей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки бесконечных резинотросовых лент | 1988 |
|
SU1803329A1 |
| УСТАНОВКА ДЛЯ СВАРКИ ПОПЕРЕЧНЫХ ШВОВ ОБЕЧАЕК | 1969 |
|
SU253270A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 2018 |
|
RU2685003C1 |
| СПОСОБ КОНТРОЛЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2168150C2 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Машина для обработки стеклоизделий | 1977 |
|
SU941324A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ЗАЧНСТКИ И ПЕРЕСТАНОВКИ АНОДНЫХ СПУСКОВ | 1973 |
|
SU370269A1 |
| Прибор для определения гибкости обуви | 1981 |
|
SU1000841A1 |
| Устройство для обработки внутреннихпОВЕРХНОСТЕй ТЕл ВРАщЕНия | 1979 |
|
SU841920A1 |

Изобретение относится к грузоподъемным устройствам, в частности к манипуляторам с ручным управлением, предназначенным для механизации работ, например, при установке/снятии приборов на ступенях ракетоносителя, и может найти применение в различных отраслях промышленности при проведении погрузочно-разгрузочных работ. Манипулирующее устройство содержит механизм перемещения в виде каретки с четырьмя роликами-катками, подвешенный за вилку корпуса на крюке подъемного крана и консольно присоединенный к силовой стойке, в нижней части которой закреплен механизм подъема, механизм вращения, на конце которого размещено захватное устройство, и элементы ручного управления в виде верхнего, среднего и нижнего маховичков. Механизм вращения выполнен в виде соединенных в общем корпусе двух редукторов, один из которых червячный, а другой - конический. Последний скреплен нижней стороной конического колеса с захватным устройством, выполненным в виде планшайбы, на которую установлен кронштейн приборной рамки с закрепленным на ней прибором. Использование изобретения позволяет сократить ручную работу, повысить производительность труда, надежность в работе и безопасность обслуживающего персонала при установке и снятии приборов. 3 з.п. ф-лы, 5 ил.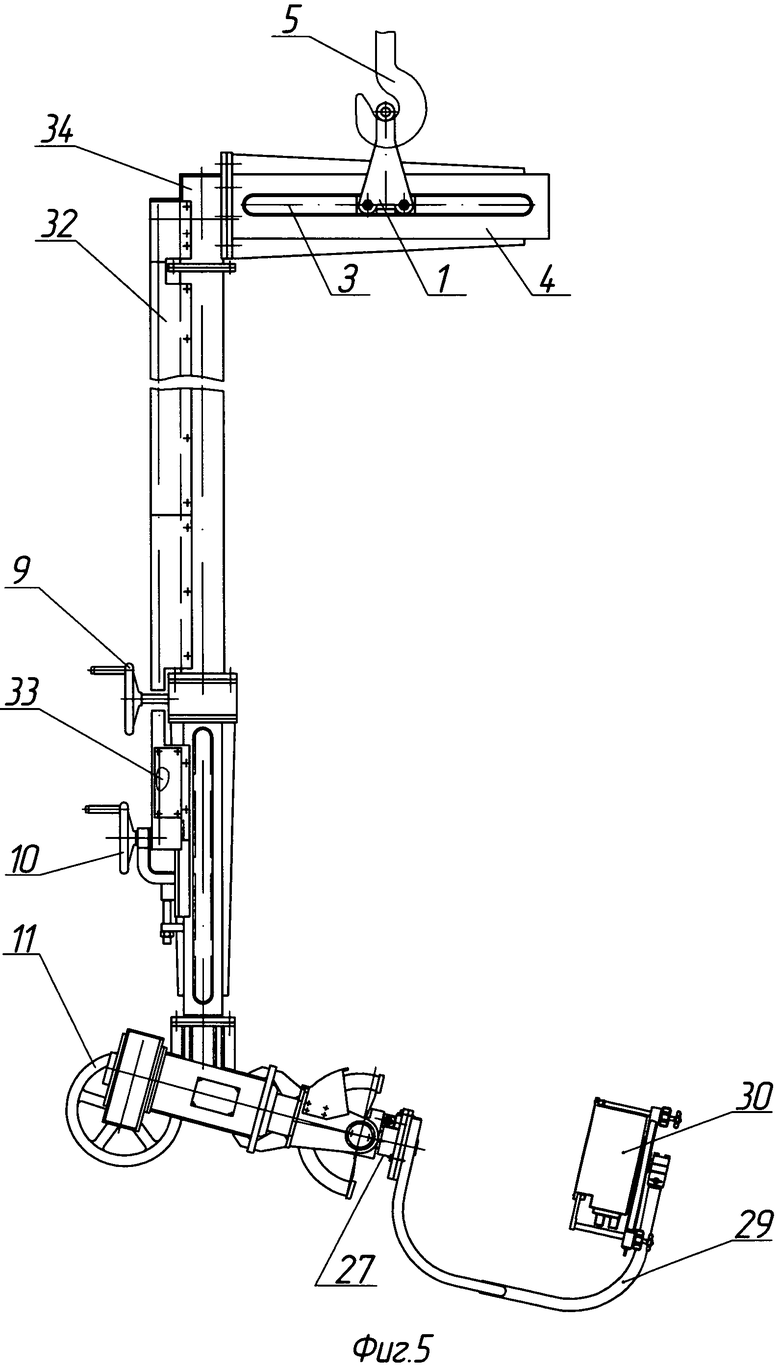
1. Подвесное манипулирующее устройство с ручным управлением, содержащее механизм перемещения в виде каретки с четырьмя роликами-катками, подвешенный за вилку корпуса на крюке подъемного крана и консольно присоединенный к силовой стойке, выполненной в виде полой призматической конструкции, в нижней части которой закреплен механизм подъема, механизм вращения, на конце которого расположено захватное устройство, элементы ручного управления в виде верхнего, среднего и нижнего маховичков и элементы крепления, отличающееся тем, что в корпус механизма перемещения, выполненный в виде короба с продольным вырезом и направляющими, встроена винтовая передача, состоящая из опорного вала, нижней приводной звездочки, связанной цепью с верхней приводной звездочкой, жестко соединенной с приводным винтом, находящимся в зацеплении с гайкой, шарнирно закрепленной на вилке, и преобразующая вращение среднего маховичка в поступательное движение каретки с возможностью обеспечения перемещения манипулирующего устройства вдоль горизонтальной оси, а механизм подъема выполнен в виде цилиндра со штоком, внутрь которого вмонтирована червячно-винтовая пара, преобразующая вращение верхнего маховичка в поступательное движение штока в цилиндре с возможностью обеспечения перемещения манипулирующего устройства вдоль вертикальной оси, при этом механизм вращения жестко связан со штоком цилиндра механизма подъема и выполнен в виде соединенных в общем корпусе двух редукторов, один из которых червячный, а другой - конический, скрепленный нижней стороной конического колеса с захватным устройством, выполненным в виде планшайбы, на которой закреплена приборная рамка, причем механизм вращения выполнен с возможностью преобразования вращения нижнего маховичка во вращательное движение планшайбы с рамкой в вертикальной плоскости.
2. Подвесное манипулирующее устройство по п.1, отличающееся тем, что для обеспечения безопасности работы обслуживающего персонала оно снабжено защитными кожухами, выполненными в виде изогнутых пластин, закрепленных на силовой стойке и ограждающих упомянутую цепь.
3. Подвесное манипулирующее устройство по п.1, отличающееся тем, что оно снабжено ограничителем прогиба цепи, выполненным в виде механизма со встроенными направляющими, препятствующими срыву звеньев цепи с приводных звездочек.
4. Подвесное манипулирующее устройство по п.1, отличающееся тем, что оно снабжено механизмом установки приводной звездочки, выполненным в виде сварного короба с двумя сквозными отверстиями, который обеспечивает передачу тягового усилия от среднего маховичка через цепь к приводной звездочке, жестко соединенной с приводным винтом механизма перемещения.
| Манипулятор | 1986 |
|
SU1425075A1 |
| Ручное манипулирующее устройство | 1984 |
|
SU1214406A1 |
| Манипулятор | 1990 |
|
SU1743844A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВЫХ КООРДИНАТ ЦЕНТРОВ | 0 |
|
SU270267A1 |

