Область техники
Предлагаемое изобретение относится к резервированным следящим электрическим приводам, которые могут использоваться в качестве исполнительных устройств (рулевых приводов) в системах управления полетом воздушным судном и, в частности, в системе управления автоматом(и) перекоса беспилотного вертолета. Изобретение может быть применено в любой отрасли промышленности, где необходимо обеспечение высокого уровня отказобезопасности.
Уровень техники
Известен двухдвигательный следящий электропривод постоянного тока [Зайцев Α.Α., Б.С. Коробов и др. «Двухдвигательный следящий электропривод постоянного тока», Авторское свидетельство SU 432647] с соединением валов двигателей через механический дифференциал, содержащий индивидуальные регулируемые преобразователи в цепях якорей двигателей, усилитель и датчики обратных связей по скорости и току.
Недостатком двухдвигательной следящего электропривода постоянного тока как аналога, является отсутствие резервирования по датчикам и каналам управления, устройствам управления, что снижает отказоустойчивость привода и отказобезопасность систем, в которых применяется привод. Применение аналоговых сигналов для управления электроприводом снижает помехоустойчивость привода.
Наиболее близким к изобретению прототипом является привод исполнительного механизма полетом [Гранд М. Серж «Привод исполнительного механизма управления полетом», Авторское свидетельство RU 2599737], содержащий: первый двигатель, соединенный с первым червячным колесом посредством первого червяка, при этом червячная передача может передавать усилие только в одном направлении; и второй двигатель соединенный со вторым червячным колесом посредством второго червяка, при этом червячная передача может передавать усилие только в одном направлении.
Причиной, препятствующей получению указанного ниже технического результата при использовании прототипа (привод исполнительного механизма управления полетом), являются:
- неприменимая компоновка для системы управления автоматом перекоса беспилотного воздушного судна вертолетного типа соосной схемы, т.к. высота привода ограничивается конструкцией колонки несущего винта вертолета. Для применения поворотного электрического привода в составе системы управления автоматом перекоса, необходимо горизонтальное расположение выходного вала, однако при таком расположении выходного вала у привода исполнительного механизма управления полетом, двигатели прототипа располагаются друг над другом, из-за чего высота привода более чем в два раза превышает высоту двигателя, что не позволяет расположить приводы на дисках колонки несущих винтов беспилотного вертолета соосной схемы;
- более низкий ресурс привода из-за отсутствия возможности определять места соприкосновения червячных колес и конических шестерен дифференциала с зацепляемыми деталями и смещать места соприкосновения во времени обеспечивая таким образом равномерный износ деталей;
- отсутствие в составе привода информационной системы и системы управления привода в то время, как надежность этих систем оказывает ключевое влияние на отказобезопасности системы управления воздушного судна. Современные электрические приводы как правило совмещают в своем составе двигатели, механические преобразователи, электрические преобразователи, устройства управления и информационные устройства, это позволяет упростить применение электрического привода и повысить отказоустойчивость привода и отказобезопасность системы управления воздушным судна;
- большая величина люфта выходного вала из-за большего количества размерных цепочек в суммирующем устройстве прототипа по сравнению с коническим дифференциалом, невозможность регулировать величину люфта;
Сущность изобретения заключается в следующем.
Задачей изобретения является уменьшение высоты резервированного электрического привода, повышение его ресурса, повышение отказоустойчивости привода и отказобезопасности системы управления вертолетом, уменьшение люфта выходного вала. Технический результат, получаемый при осуществлении изобретения, выражается в
1) Уменьшении высоты электрического привода за счет изменения его компоновки путем замены суммирующего устройства прототипа в виде планетарной передачи на конический дифференциал, что позволяет разместить привода на верхнем и нижнем дисках колонки несущих винтов беспилотного вертолета соосной схемы.
2) Повышении ресурса электрического привода за счет снижения износа червячных колес дифференциала и конических шестерен дифференциала с помощью системы управления, которая позволяет равномерно распределять время соприкосновения различных участков этих деталей с зацепляемыми деталями без изменения положения выходного вала. Это свойство является полезным в случае, например, полета вертолета на крейсерской скорости, при котором работа приводов системы управления воздушного судна как привило происходит на одном небольшом участке соприкосновения шестерен, при этом вследствие постоянных флуктуационных возмущений внешней среды, воздействующих на вертолет, положение привода, устанавливаемое системой управления, колеблется в одной области, вызывая износ только тех участков шестерен, которые соответствует крейсерскому режиму. Таким образом равномерно смещая во времени точки соприкосновения шестерен без изменения положения выходного вала можно существенно повысить ресурс резервированного электрического привода.
3) Повышение отказоустойчивости привода и отказобезопасности системы управления вертолетом за счет размещения в составе привода информационной и управляющей системы с четырехкратным резервированием по датчикам положения, двукратным по системе управления и каналу информационного обмена с системой автоматического управления воздушного судна.
4) Уменьшении люфта выходного вала электрического привода за счет меньшего количества размерных цепочек в дифференциале по сравнению с суммирующим устройством прототипа в виде планетарной передачи и возможности регулировать величину люфта.
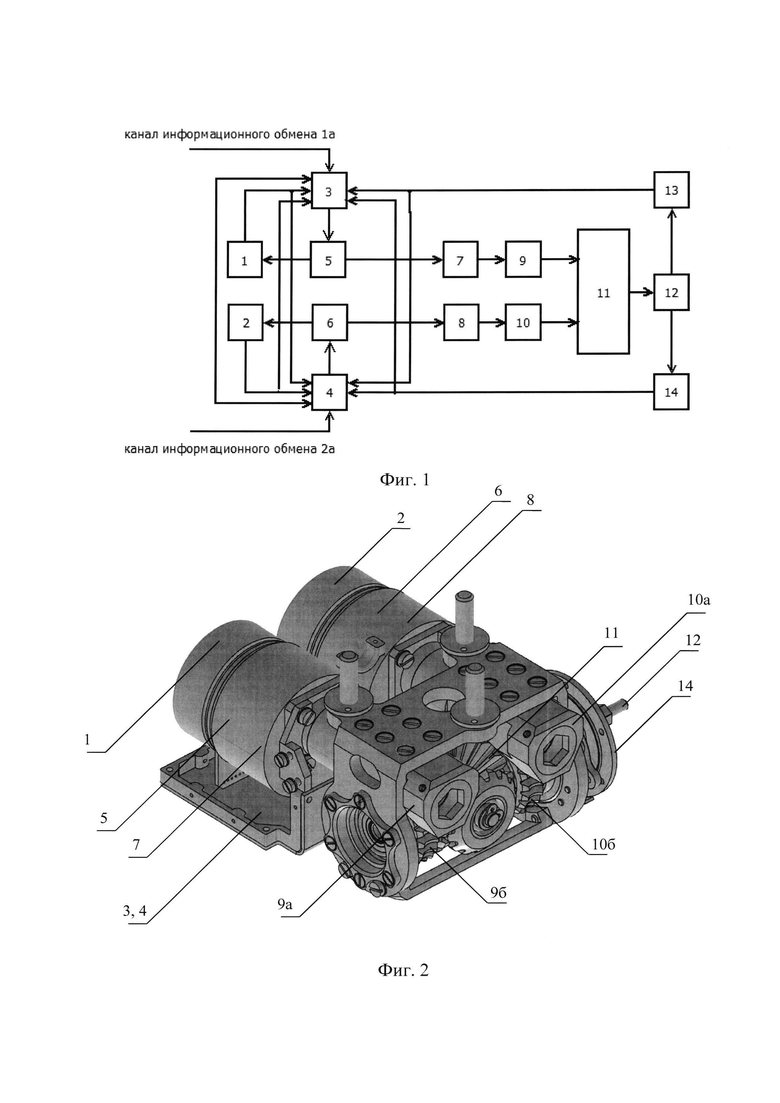
Указанный технический результат достигается тем, что в известный прототип, который содержит первый двигатель, соединенный с первым червячным колесом посредством первого червяка, при этом червячная передача может передавать усилие только в одном направлении; и второй двигатель соединенный со вторым червячным колесом посредством второго червяка, при этом червячная передача может передавать усилие только в одном направлении, согласно изобретению дополнительно вводятся: вместо устройства суммирования скоростей на базе планетарной передачи конический дифференциал 11 обеспечивающий горизонтальное параллельное расположение двигателей на одной плоскости и горизонтальное расположением выходного вала, суммирование скоростей вращения червячных колес передач 9, 10 и обеспечивающий вращение выходного вала 12; первый датчик абсолютного положения выходного вала 13, механически соединенный с выходным валом 12, и электрически и информационно с системой управления первого двигателя 3, системой управления второго двигателя 4; второй датчик абсолютного положения выходного вала 14, механически соединенный с выходным валом 12, и электрически и информационно с системой управления второго двигателя 4, системой управления первого двигателя 3; датчик положения 1 первого двигателя, механически соединенный с первым двигателем 5, также соединяющийся электрически и информационно с системой управления первого двигателя 3, системой управления второго двигателя 4; датчик положения 2 второго двигателя, механически соединенный со вторым двигателем 6, также соединяющийся электрически и информационно с системой управления второго двигателя 4, системой управления первого двигателя 3; система управления первого двигателя 3, которая управляет первым двигателем 5 и получает информацию от датчиков 1, 2, 13, 14 и системы управления 4; система управления 4 второго двигателя, которая управляет вторым двигателем 6 и получает информацию от датчиков 1, 2, 13, 14 и системы управления 3; канал информационного обмена 1а по которому передаются управляющие воздействия на систему управления 3 от системы управления воздушным судном; канал информационного обмена 2а по которому передаются управляющие воздействия на систему управления 4 от системы управления воздушным судном.
Причинно-следственные связи признаков изобретения с техническим результатом выражаются в следующем. Использование дифференциала 11 вместо суммирующего устройства прототипа в виде планетарной передачи позволяет уменьшить высоту электрического привода таким образом, чтобы его можно было скомпоновать в колонке несущего винта беспилотного вертолета. Данный эффект достигается за счет того, что дифференциал при горизонтальном расположении выходного вала позволяет разместить двигатели горизонтально в одной плоскости, в отличие от прототипа, где двигатели необходимо располагать вертикально, из-за чего увеличивается высота привода.
Введение первого датчика абсолютного положения выходного вала 13, второго датчика абсолютного положения выходного вала 14, датчика положения вала первого двигателя 1, датчика положения вала второго двигателя 2, системы управления первым двигателем 3, системы управления вторым двигателем 4 позволяет контролировать места соприкосновения червячных шестерен червячных передач 9, 10 конических шестерен дифференциала 11 с зацепляемыми деталями и автоматически смещать эти точки соприкосновения по командам систем управления 3, 4 обеспечивая равномерный износ шестерен дифференциала и червячных колес по всей окружности, при этом не происходит изменения положения выходного вала, либо же не происходит отклонения выходного вала от заданного значения, что позволяет значительно повысить ресурс изделия в тех случаях когда выходной вал совершает небольшие колебания в одной области в течение длительного времени, например, при полете воздушного судна на крейсерской скорости.
Введение первого датчика абсолютного положения выходного вала 13, второго датчика абсолютного положения выходного вала 14, датчика положения вала первого двигателя 1, датчика положения вала второго двигателя 2, системы управления первым двигателем 3, системы управления вторым двигателем 4, канала информационного обмена 1а, канала информационного обмена 2а, позволяет повысить отказобезопасности системы управления вертолетом за счет четырехкратного резервирования по датчикам положения, дублирования системы управления, дублирования канала информационного обмена.
Использование дифференциала 11 вместо суммирующего устройства прототипа позволяет уменьшить люфт выходного вала, за счет уменьшения количества размерных цепочек с 3 в суммирующем устройстве прототипа до 2 в дифференциале, а также за счет появляющейся возможности регулировать люфт за счет регулировочных прокладок, которые позволяют смещать конические шестерни к центру крестовины.
Изобретение поясняется чертежами, на которых представлены: фиг. 1 - схема структурная резервированного электрического следящего привода;
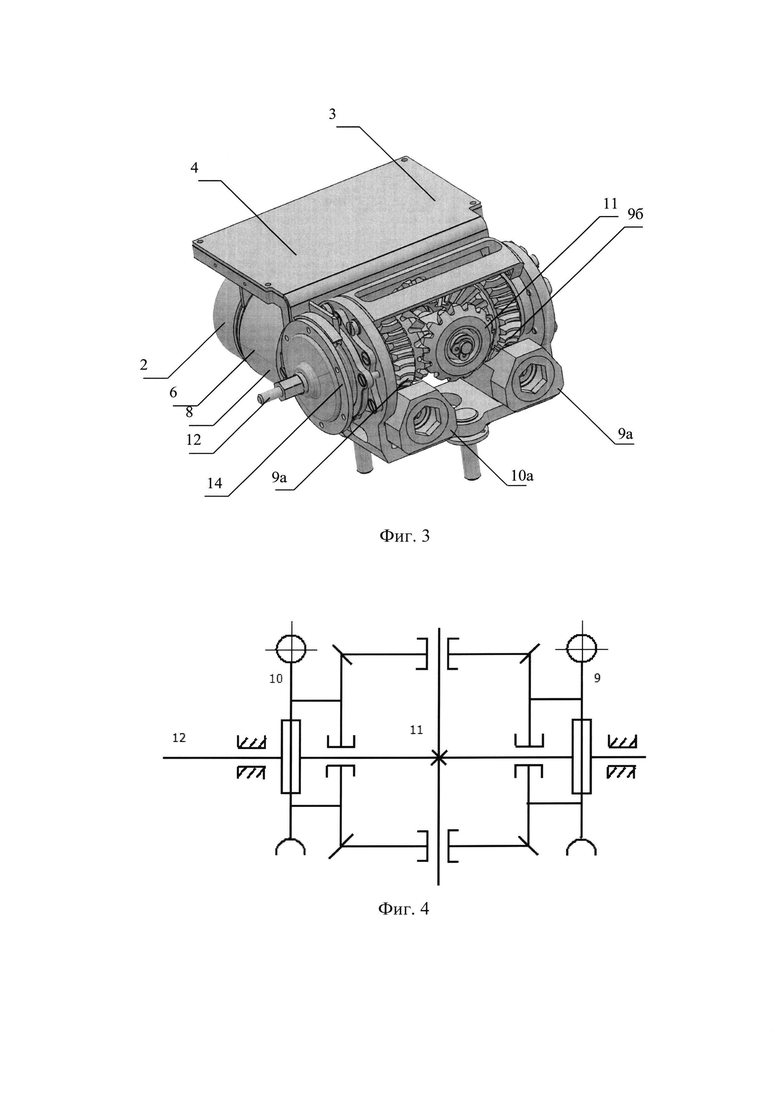
фиг.2 - трехмерный вид снизу в 3/4 электрического следящего привода фиг. 3 - трехмерный вид сверху в 3/4 электрического следящего привода; фиг. 4 - кинематическая схема узла, содержащего конический дифференциал 11, червячные передачи 9, 10, выходной вал 12
Резервированный электрический следящий привод (фиг. 1) содержит: первый двигатель 5, соединенный с первым промежуточным редуктором 7, который соединен с первой червячной передачей 9, передающий усилие только в одном направлении, на дифференциал 11; второй двигатель 6 соединенный со вторым промежуточным редуктором 8, который соединен со второй червячной передачей 10, передающий усилие только в одном направлении, на дифференциал 11; конический дифференциал 11, обеспечивающий горизонтальное параллельное расположение двигателей на одной плоскости и горизонтальное расположением выходного вала и обеспечивающий вращение выходного вала 12; первый датчик абсолютного положения выходного вала 13, механически соединенный с выходным валом 12, и электрически и информационно с системой управления первого двигателя 3, системой управления второго двигателя 4; второй датчик абсолютного положения выходного вала 14, механически соединенный с выходным валом 12, и электрически и информационно с системой управления второго двигателя 4, системой управления первого двигателя 3; датчик положения 1 первого двигателя, механически соединенный с первым двигателем 5, также соединяющийся электрически и информационно с системой управления первого двигателя 3, системой управления второго двигателя 4; датчик положения 2 второго двигателя, механически соединенный со вторым двигателем 6, также соединяющийся электрически и информационно с системой управления второго двигателя 4, системой управления первого двигателя 3; систему управления первого двигателя 3, которая управляет первым двигателем 5 и получает информацию от датчиков 1, 2, 13, 14 и системы управления 4; систему управления второго двигателя 4, которая управляет вторым двигателем 6 и получает информацию от датчиков 1, 2, 13, 14 и системы управления 3; канал информационного обмена 1а по которому передаются управляющие воздействия на систему управления 3 от системы управления воздушным судном; канал информационного обмена 2а по которому передаются управляющие воздействия на систему управления 4 от системы управления воздушным судном.
Резервированный электрический следящий привод работает следующим образом. Устройства управления 3, 4 принимают заданное значение положения выходного вала от системы управления полетом воздушного судна через каналы информационного обмена 1а, 2а при этом оценивая текущее положение выходного вала по датчикам 13, 14 и датчикам положения роторов двигателей 1, 2, определяют величину рассогласования между заданными и текущим положением выходного вала и в соответствии с этой величиной вырабатывают управляющие воздействия на двигатели 5, 6, которые выполняют вращение в соответствии с управляющим воздействием, вращая промежуточные редукторы, 7, 8, а те в свою очередь червячные передачи 9, 10, которые вращают шестерни дифференциала 11, дифференциал же работая как устройство сложения скоростей обеспечивает вращение выходного вала 12. Системы управления 3, 4 обеспечивают выдачу управляющего воздействия на двигатели 5, 6 до тех пор, пока положение выходного вала не достигнет заданного положения, обратная связь обеспечивается датчиками 1, 2, 11, 12, по достижении выходным валом 12 заданного положения двигатели 5, 6 могут быть отключены и в этом случае они не будут потреблять электроэнергию т.к. удержание положения вала обеспечивается за счет самостопорящихся червячных передач 9, 10. Если оба двигателя 5, 6 вращаются в разные стороны с одинаковыми скоростями, то вращение выходного вала происходит либо по часовой стрелке, либо против в зависимости от того в каком направлении вращаются двигатели, при этом на выходном валу происходит сложение скоростей вращения червячных колес червячных передач 9, 10.
Система управления первым двигателем 3 и система управления вторым двигателем 4 с помощью датчиков 13, 14, 1, 2, а так же за счет информационной связи между собой контролируют места соприкосновения червячных шестерен червячных передач 9, 10 конических шестерен дифференциала 11 с зацепляемыми деталями и автоматически смещают эти точки соприкосновения выдавая необходимые управляющие воздействия на двигатели 5, 6 обеспечивая равномерный износ шестерен дифференциала и червячных колес по всей окружности, при этом не происходит изменения положения выходного вала, либо же не происходит отклонения выходного вала от заданного значения, что позволяет значительно повысить ресурс изделия в тех случаях когда выходной вал совершает небольшие колебания в одной области в течение длительного времени, например, при полете воздушного судна на крейсерской скорости.
В случае отказа двигателя 5, самостопорящеяся червячная передача 9 не позволяет передать обратное движение червячного колеса на вал промежуточного редуктора 7 в этом случае дифференциал 13 работает только от двигателя 6, при этом снижается скорость вращения выходного вала в два раза, но сохраняется крутящий момент, аналогично, в случае выхода из строя двигателя 6 самостопорящеяся червячная передача 10 не позволяет передать обратное движение червячного колеса на вал промежуточного редуктора 8 в этом случае дифференциал 11 работает только от двигателя 5. В случае отказа промежуточного редуктора 7 самостопорящеяся червячная передача 9 не позволяет передать обратное движение червячного колеса на вал промежуточного редуктора в этом случае дифференциал 11 работает только от двигателя 6. В случае отказа промежуточного редуктора 8 самостопорящеяся червячная передача 10 не позволяет передать обратное движение червячного колеса на вал промежуточного редуктора, в этом случае дифференциал 11 работает только от двигателя 5. В случае отказа одного из датчиков 1, 2, 11, 12 управляющее устройство 3 используя мажоритарный принцип или другим способом определяет действительное положение вала, определяет отказавший датчик и выдает на двигатель 5 соответствующее управляющее воздействие. В случае отказа одного из датчиков 1, 2, 11, 12 управляющее устройство 4 по мажоритарному принципу или другим способом определяет действительное положение вала, определяет отказавший датчик и выдает на двигатель 6 соответствующее управляющее воздействие. В случае отказа управляющего устройства, 3 при котором оно не выдает управляющее воздействие на двигатель 5 работа будет обеспечена работой управляющего устройства 4 и двигателя 6. В случае отказа управляющего устройства, 4 при котором оно не выдает управляющее воздействие на двигатель 6 работа будет обеспечена работой управляющего устройства 3 и двигателя 5.
В зависимости от характеристик двигателей 5, 6 привод может быть реализован как с дополнительными редукторами 7, 8 фиг. 1, так и без них, в этом случае первый двигатель 5 соединен напрямую с первой червячной передачей 9, а второй двигатель 6 аналогично соединен со второй червячной передачей 10.
На фиг. 2 и фиг. 3 представлены трехмерные виды электрического следящего привода. На изображении двигатель 6 дополнительный редуктор 8 объединены в одном корпусе, двигатель 5, дополнительный редуктор 7 также объединены в одном корпусе. Первый червяк с корпусом 9а, первое червячное колесо 10б образуют червячную передачу 9, второй червяк с корпусом 10а, второе червячное колесо 10б образуют вторую червячную передачу 10. Системы управления 3, 4 могут располагаться на одной печатной плате, либо на раздельных.
Принцип работы конического дифференциала хорошо известен он широко применяется в промышленности, в [Артоболевский И.И. Теория механизмов и машин: Учеб. Для втузов - ч-е изд., перераб. И доп. - М.: Наука. Гл. ред. физ. мат. мит., 1988. - 640 с., стр. 163, 164] представлена схема дифференциального суммирующего механизма с коническими колесами взятого за основу. Принцип работы узла, содержащего конический дифференциал 11, червячные передачи 9, 10, выходной вал 12 поясняется на фиг.3. Конический дифференциал 11 обеспечивает сложение скоростей вращения колес червячных передач 9, 10 на выходном валу 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1974 |
|
SU550630A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЭЛЕМЕНТОВ БЕСПИЛОТНОГО ВЕРТОЛЕТА С СООСНЫМИ ВИНТАМИ | 2016 |
|
RU2628873C2 |
| Двухпоточная трансмиссия | 2019 |
|
RU2705371C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Электромеханический привод гребного винта судна | 2015 |
|
RU2622175C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ БЕССТУПЕНЧАТОЙ ВАРИАТИВНОЙ ТРАНСМИССИЕЙ И СПОСОБ БАЛАНСИРОВКИ МОЩНОСТИ ЭЛЕКТРОСИСТЕМЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2822499C1 |
| АКТИВНАЯ ТРАНСМИССИЯ, КОРОБКА ПРЯМОГО ВКЛЮЧЕНИЯ (МЕХАНИЧЕСКАЯ), КОРОБКА СКОРОСТЕЙ С ПЛАНЕТАРНЫМ ФРИКЦИОНОМ И НЕЗАВИСИМОЙ ЗАДНЕЙ ПЕРЕДАЧЕЙ, РАЗДАТОЧНАЯ КОРОБКА С МЕХАНИЗМОМ РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА ОСЯМИ (КОЛЕСАМИ) | 2004 |
|
RU2292270C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
Изобретение относится к области электротехники, а именно к резервированным следящим электрическим приводам, которые могут использоваться в качестве исполнительных устройств (рулевых приводов) в системах управления полетом воздушным судном и, в частности, в системе управления автоматом(и) перекоса беспилотного вертолета. Технический результат заключается в уменьшении высоты привода, повышении его ресурса, повышении отказоустойчивости привода и отказобезопасности системы управления вертолетом, уменьшении люфта выходного вала. Резервированный электрический следящий привод содержит: первый и второй двигатели (5, 6), соединенные с первым и вторым червячными колесами (9, 10), при этом червячные передачи (9, 10) могут передавать усилие только в одном направлении. Датчики абсолютного положения (13, 14) механически соединены с выходным валом (12) и электрически и информационно с системами управления (3, 4). Система управления позволяет равномерно распределять время соприкосновения различных участков этих деталей с зацепляемыми деталями без изменения положения выходного вала. Датчики положения (1, 2) механически соединены с первым (5) и вторым (6) двигателями, также соединены электрически и информационно с системами управления (3, 4). В виде суммирующего устройства используется дифференциал, что позволяет разместить приводы на верхнем и нижнем дисках колонки несущих винтов беспилотного вертолета соосной схемы. 1 з.п. ф-лы, 4 ил.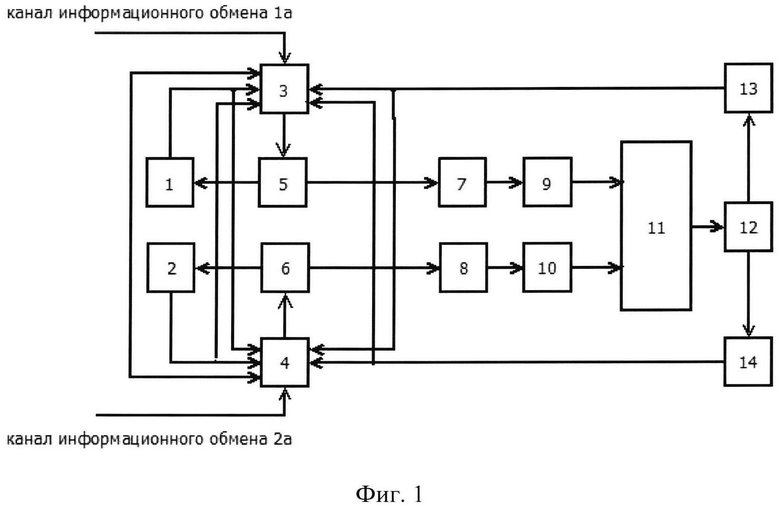
1. Резервированный электрический следящий привод, который содержит: первый двигатель (5), соединенный с первым червячным колесом посредством первого червяка, при этом червячная передача (9) может передавать усилие только в одном направлении; и второй двигатель (6), соединенный со вторым червячным колесом посредством второго червяка, при этом червячная передача может передавать усилие только в одном направлении (10), отличающийся тем, что дополнительно снабжен первым датчиком абсолютного положения (13), механически соединенным с выходным валом (12) и электрически и информационно с системой управления (3), системой управления (4); вторым датчиком абсолютного положения (14), механически соединенным с выходным валом (12) и электрически и информационно с системой управления (4), системой управления (3); датчиком положения (1), механически соединенным с первым двигателем (5), также соединенным электрически и информационно с системой управления (3), системой управления (4); датчиком положения (2), механически соединенным со вторым двигателем (6), также соединенным электрически и информационно с системой управления (4), системой управления (3), которая управляет первым двигателем (5) и получает информацию от датчиков (1), (2), (13), (14) и системы управления второго двигателя (4), которая управляет вторым двигателем (6) и получает информацию от датчиков (1), (2), (13), (14) и системы управления первого двигателя (5); каналом информационного обмена (1а), по которому передаются управляющие воздействия на систему управления (3) от системы управления воздушным судном; каналом информационного обмена (2а), по которому передаются управляющие воздействия на систему управления (4) от системы управления воздушным судном, в качестве устройства суммирования используется конический дифференциал (11), вращение которого обеспечивается через первое червячное колесо (9) и второе червячное колесо (10).
2. Резервированный электрический следящий привод по п. 1, отличающийся тем, что дополнительно содержит первый промежуточный редуктор (7), соединяющий первый двигатель (5) и самостопорящуюся червячную передачу (9), и второй промежуточный редуктор (8), соединяющий второй двигатель (6) и самостопорящуюся червячную передачу (10).
| ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА УПРАВЛЕНИЯ ПОЛЕТОМ | 2015 |
|
RU2599737C2 |
| CN 110701249 A, 17.01.2020 | |||
| Привод резервированный самостопорящийся | 2016 |
|
RU2653606C2 |
| СПОСОБ УДАЛЕНИЯ ОКАЛИНЫ С ПОВЕРХНОСТИ ТИТАНА | 0 |
|
SU185163A1 |
| ДВУХДВИГАТЕЛЬНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1969 |
|
SU432647A1 |

