1 . 1
Изобретение относится к энергетическому машиностроению, к манипулирующим устройствам перегрузочных машин ядерных реакторов.
Известно манипулирующее устройство, содержащее грузовые цепи, схват, подвешенный на этих цепях, и кинематически связанные между собой механизм перемещения цепей с дифференциалом и механизм управления схватом,выполненный в виде червячных передач, червячйые колеса которых соосны звездочкам механизма перемещения цепей.
Недостатком известного устройства являются высокие энергозатраты, возникающие из-за низкого КПД передач.
Цель изобретения - снижение энергозатрат.
Цель достигается тем, что манипулирующее устройство, содержащее две грузовые цепи, схват, подвешенный на этих цепях и кинематически связанные между собой механизм перемещения цепей с дифференциалом и механизм управления схватом, вьтолненный в виде червячных передач, червячные колеса которых соосны звездочкам механизма перемещения цепей, снабжено вторым дифференциалом, причем выходные колеса первого и второго дифференциалов жестко соединены с червячными колесами механизма управления схватом, а водила этих дифференциаловсо звездочками, при этом валы червяков механизма управления схватом жестко связаны между собой.
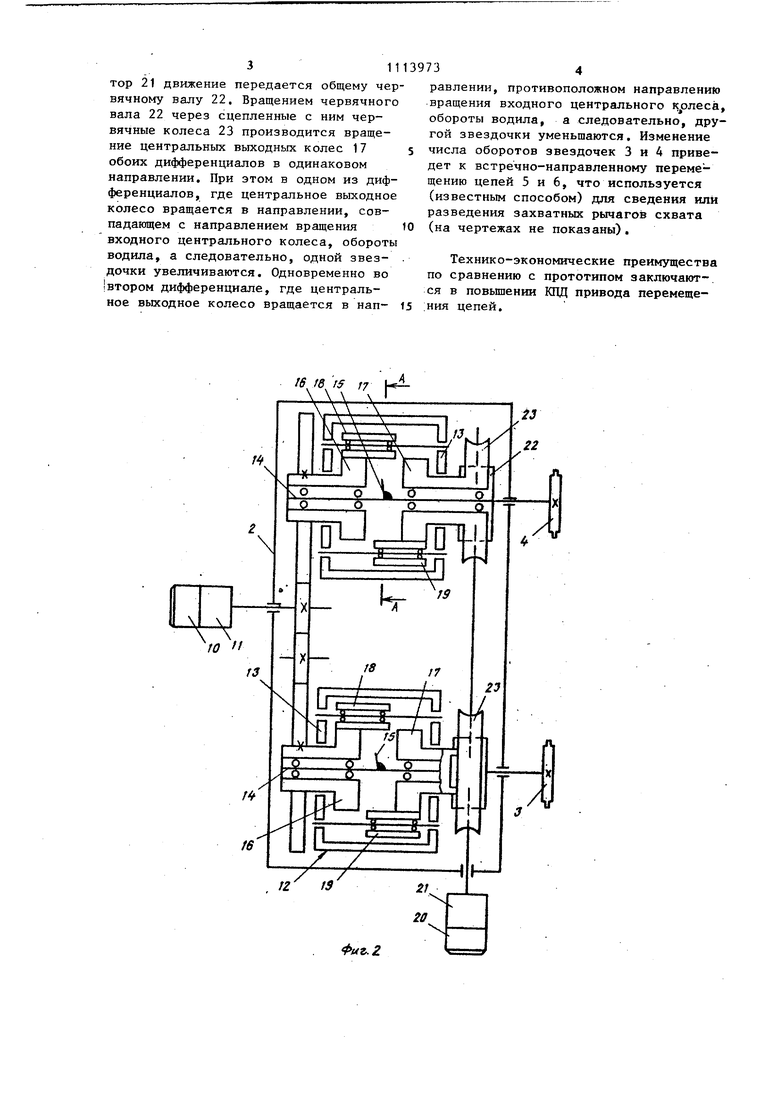
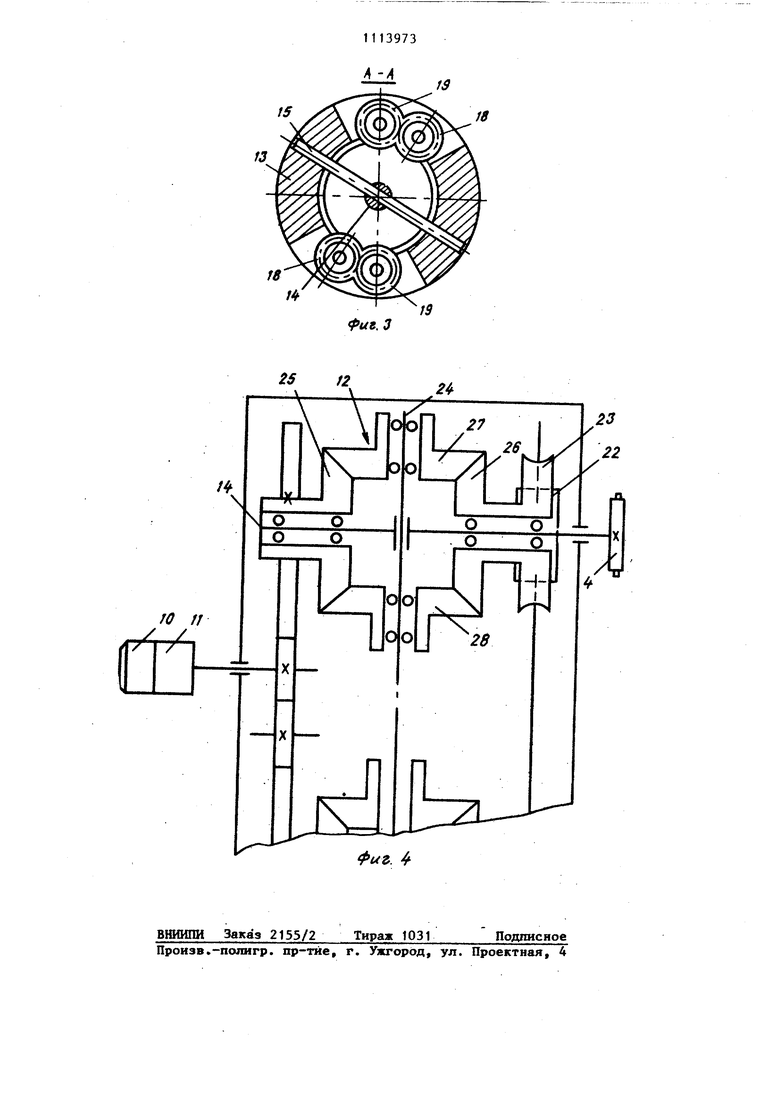
На фиг.1 - манипулирующее устройство, разрез по вертикали; на фиг.2 кинематическая схема; на фиг.З. - разрез А-А на фиг.2; на фиг.4 - вариант кинематической схемы (часть).
Манипулиругацее устройство (см. ; фиг.1) устанавливается на герметичном корпусе 1 и состоит из приводной коробки 2 с двумя ведущими звездочками 3 и 4, цепей 5 и 6 одностороннего изгиба, дистанционно управляемого схвата 7 и двух цепеприемников 8 и 9
Привод перемещения цепей содержит двигатель 10, редуктор 11, два дифференциала 12 (на фиг.2 показан цилиндрический дифференциал; на фиг.4 конический дифференциал). Дифференциал из цилиндрических зубчатых колес (см.фиг.2) имеет водило 13, жестко соединенное с выходным валом 14 по перечной осью 15, центральное входное колесо 16, центральное выходное коле3 .2
со 17 и сателлиты 18 и 19 (см.фиг.4), которые сцеплены между собой и каждый из которых связан с одним из центральных колес 16 и 17. Привод управления
схватом содержит двигатель 20, редуктор 21 и общий червячный вал 22, сцепленный с червячными колесами 23, жестко соединенными с центральными выходными колесами 17 дифференциалов.
Звездочки 3 и 4 расположены соосно с червячными колесами 23 и жестко соединены с водилами 13 через выходные валы 14.
Дифференциал из конических зубчатых колес (см.фиг.4) имеет водило 24, жестко соединенное с выходным валом 14, центральное входное колесо 25, центральное выходное колесо 26 и сателлиты 27 и 28, которые одновременно
сцеплены с центральными колесами 25 и 26. Привод управления схватомостается без изменения, только червячные колеса 23 жестко соединены с центральными выходными колесами 26, а
звездочки 3 и 4 жестко соединены с водилами 24 через выходные валы 14.
Дифференциал из конических зубчатых колес имеет меньшее количество зубчатых колес по сравнению с дифференциалом из цилиндрических зубчатых колес, однако изготовление таких колес и сборка дифференциаланесколько сложнее, Механизм перемещения цепей с цилиндрическими дифференциалами работает следующим образом. От двигателя 10 через редуктор 11 движение передается на входные центральные колеса 16 обоих дифференциалов, которые
вращаются в противоположных направлениях. Движение от колес 16 передается через сателлиты 18 и 19 на выходные центральные колеса 17, которые стремятся повернуть общий червячный
вал 22 в разные стороны. Но поскольку это невозможно, то червячные колеса 23 остаются неподвижными и являются тормозом центральных выходных колес 17.. Сателлиты 19, обкатываясь вокруг заторможенных центральных выходных коес 17, вращают водила 13, выходные , валы 14 и звездочки 3 и 4 в направлении вращения входных центральных коес 16 и в зависимости от направления
их вращения осуществляется перемещение цепей 5 и 6 вверх или вниз.
Управление схватом производится ключением двигателя 20. Через редук311
тор 21 движение передается общему черзячному валу 22, Вращением червячного вала 22 через сцепленные с ним червячные колеса 23 производится вращение центральных выходных колес 17 обоих дифференциалов в одинаковом направлении. При этом в одном из дифференциалов, где центральное выходное колесо вращается в направлении, совпадающем с направлением вращения входного центрального колеса, обороты водила, а следовательно, одной звездочки увеличиваются. Одновременно во IBTOPOM дифференциале, где центральное выходное колесо вращается в нап734
равлении, противоположном направлению вращения входного центрального к элеса, обороты водила, а следовательно, другой звездочки уменьшаются. Изменение числа оборотов звездочек 3 и 4 приведет к встречно-направленному перемещению цепей 5 и 6, что используется (известным способом) для сведения или разведения захватных рычагов охвата
(на чертежах не показаны).
Технико-экономические преимущества по сравнению с прототипом заключаются в повьшении КПД привода перемеще;ния цепей.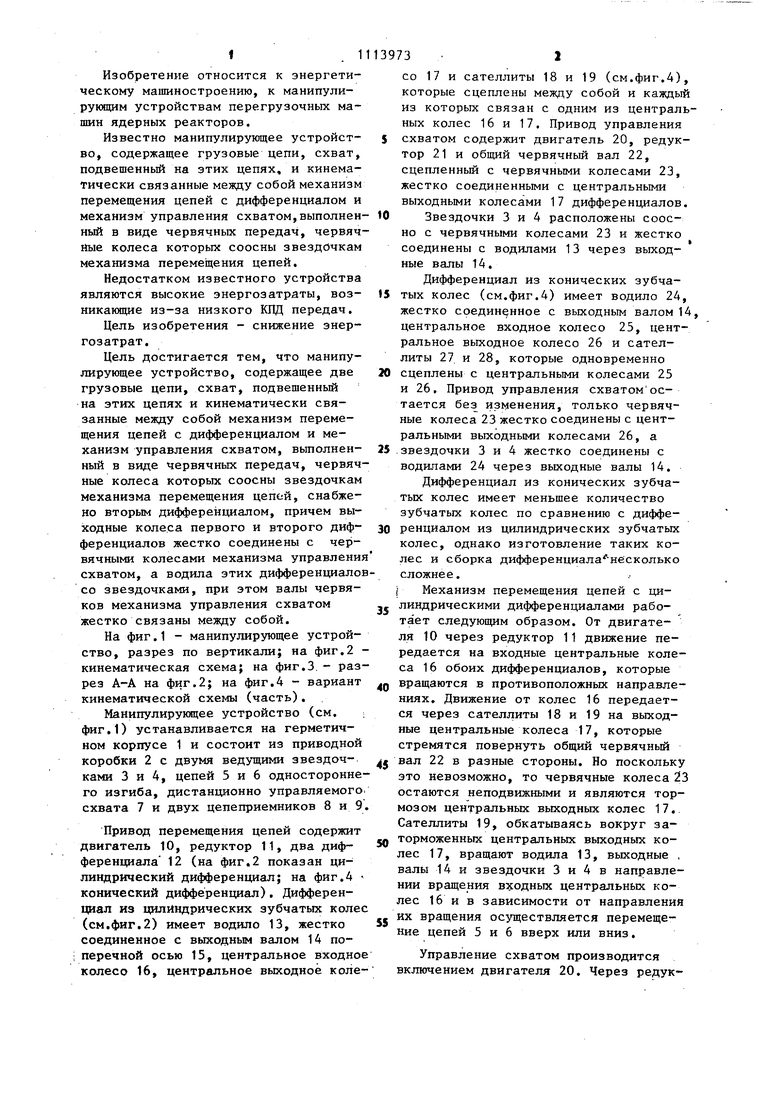
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛИРУЮЩЕЕ ПРИСПОСОБЛЕНИЕ | 1970 |
|
SU260027A1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2156902C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| Основный регулятор ткацкого станка | 1989 |
|
SU1661253A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Загрузочное устройство для проявочной машины непрерывного действия | 1988 |
|
SU1580313A1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ ДЛЯ ПРИВОДА ВЕДУЩИХ ОСЕЙ И КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2125673C1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Транспортная система | 1984 |
|
SU1232569A1 |
| Ткацкий станок | 1989 |
|
SU1622449A1 |
МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО, содержащее грузовые цепи, схват,подвешенный на этих цепях, и кинематически связанные меязду собой меха,низн перемещения цепей с первым дифференциалом и механизм управления схватом, вьтолненный в виде червячных передач, червячные колеса которых соосны звездочкам механизма перемещения цепей, отличающееся тем, что, с целью уменьшения энергозатрат путем повышения КПД передач, оно снабжено вторым дифференциалом, причем выходные колеса первого и второго дифференциалов жестко соединены с червячными колесами механизма управления схватом, а водила этих дифференциалов - со звездочками, при этом валы червяков механизма управления схватом жестко связаны между собой. 00 QD оо
/5/5/5 Г7 К V
LJ
J
Фиг. г
15
IB
2S f2
W /Г
//
4-/
иг, J
2
| МАНИПУЛИРУЮЩЕЕ ПРИСПОСОБЛЕНИЕ | 0 |
|
SU260027A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
