Известные способы помехоустойчивой коррекции для Систем автоматического управления для получения амплитудно-частотной характеристики системы со спадом Б области высоких частот и фазовой с опережением основаны либо на изменении коэффициента передачи усилителя, либо на изменении параметра корректирующего контура в зависимости от частоты входного сигнала.
Однако в условиях нормальной работы системы, когда входной сигнал имеет сложную форму, эти способы не обеспечивают требуемой коррекции, так как требования к изменению параметров корректирующего контура оказываются противоречивыми.
Предлагаемый способ отличается от известных тем, что выделяют из сигнала ошибки два сигнала той же частоты, сдвинутые относительно друг друга по фазе на -г-, модулируют эти
Zi
сигналы напряжениями несущей частоты, фазы которых сдвинуты на - , и раздельно форми i
руют амплитудно-модулированный сигнал и сигналы верхней и нижней боковых частот. После этого создают вдвое меньшее запаздывание амплитудно-модулированного сигнала по сравнению с сигналом нижней боковой полосы частот и суммируют амплитудно-модулированный сигнал и сигнал нижней боковой полосы частот с сигналом верхней боковой полосы частот, а полученный суммарный сигнал подают на силовую управляющую часть системы.
Это расширяет область устойчивости и повышает точность работы системы.
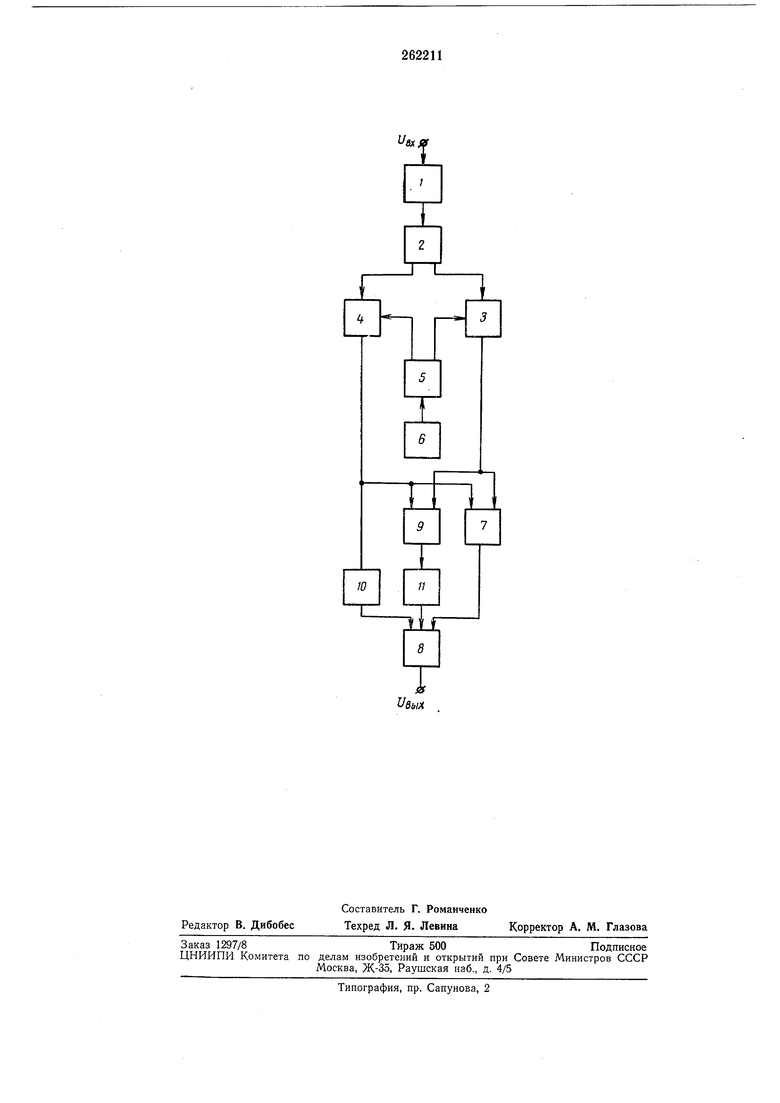
Один из возможных вариантов осуществления предлагаемого способа можег быть вьгполнен по блок-системе, представленной на чертеже.
Блок-схема включает в себя фильтр / низких частот, низкочастотный широкополосный фазовращатель 2, балансные модуляторы 3 и 4, высокочастотный фазовращатель 5, источник 6 напряжения несущей частоты, сумматоры 7 и 8, вычятатель 9, фильтр 10 постоянного затухания амплитудно-модулированного сигнала, фильтр // постоянного затухания сигнала боковой полосы частот.
Сигнал /7вх оилибки системы автоматического управления пропускают через фильтр низких частот и раздельно получают амплитудно-модулированный сигнал, сигнал верхней боковой полосы частот и сигнал нижней боковой полосы частот. Амплитудно-модулированный сигнал и сигнал нижней боковой полосы частот пропускают через фильтры постоянного затухания с фазовыми частотными характеристиками с запаздыванием. При этом фильтр
чивает вдвое меньшее запаздывание по сравнению с фильтром сигнала нижней боковой частоты. Затем их суммируют с сигналом верхней боковой полосы частот. Полученный суммарный сигнал 7вых подают на силовую управляющую часть системы.
Теоретический анализ подтверждает, что сигнал ошибки .системы управления имеет гармонический характер, тогда сигнал на выходе фильтра низких частот будет иметь вид: /выхфн. UokSi -ф(Q), где /s(Q)-коэффициент передачи фильтра
на частоте Q, ф(0) - сдвиг фазы на частоте Q.
Выражения для амплитудно-модулированного сигнала, сигнала верхней боковой лолосы частот и сигнала нижней боковой полосы частот соответствейно принимает вид:
t/aM (Jo k(Q) -ф(Q)sincй, (L.cos(co + Q)-9(2);
t
и Л cos((o-Q) + 9(Q),
i
где CO - частота модулируемого напряжения.
Выражение для сигнала на выходе фильтра
постоян-ного затухания ампл«тудно-модулированного сигнала имеет вид
f/o fe(Q) (Q) sin();
a на выходе фильтра нижней боковой полосы
частот:
. со5(ш-Q) + Ф(2)-2ФП,;
С/,
вых фнп
где фщ - сдвиг фазы амплитудно-модулированного сигнала;
2фп - сдвиг фазы сигнала нижней боковой полосы частот.
Тогда выражение для сигнала на выходе сумматора запишется:
вп т -вых фам Г вых фнп -
f/0 АИ . COS pn,sln (Qi + (срп, - р (Q)} sin X X (i - п,).
Из рассмотрения последнего выражения следует, что при /Фп«/ -/ (и)/ способ коррекции приводит к фазовой частотной характеристике с опережением, так как сдвиг фазы несущей частоты на угол фзп не оказывает существенного влияния на сдвиг фазы огибающей. Амплитудно-частотная характеристика будет иметь спад на высоких частотах в соответствии с характером амплитудно-частотной характеристики фильтра низких частот, так как
значение /созфп / const в диапазоне изменения частоты i2 сигнала ошибки..
Предмет изобретения
Способ помехоустойчивой коррекции для систем автоматического управления с использованием низкочастотного фильтра и фильтров постоянного затухания, отличающийся тем, что, с целью расширения области устойчивости и повышения точности работы системы, выделяют из сигнала ошибки два сигнала той же частоты, сдвинутые относительно друг друга по фазе «а-, модулируют эти сигналы на
пряжениями несущей частоты, фазы которых
сдвинуты на -, и раздельно формируют
i
амплитудно-модулированный сигнал и сигналы верхней и нижней боковых частот, после чего создают вдвое меньшее запаздывание амплитудно-модулированного сигнала по сравнению с сигналом нижней боковой -полосы частот и
суммИруют амплитудно-модулированный сигнал и сигнал нижней боковой полосы частот с сигналом верхней боковой полосы частот, а полученный суммарный сигнал подают на силовую управляющую часть системы.