Изобретение относится к способам контроля параметров элементов систем автоматического управления.
Известны спОСобы измерения кинематической погрешности механизмов следящих систем, при которых используют схемы дистанционных передач с эталонным элементом.
Предлагаемый способ отличается от известных тем, что измеряют суммарную ошибку дистанционной передачи и контролируемого механизма, подают суммарный сигнал на эталонный элемент и фиксируют соответствующие перемещения контролируемого механизма. Это позволяет повысить точность измерений кинематической погрешности механизмов следящих систем.
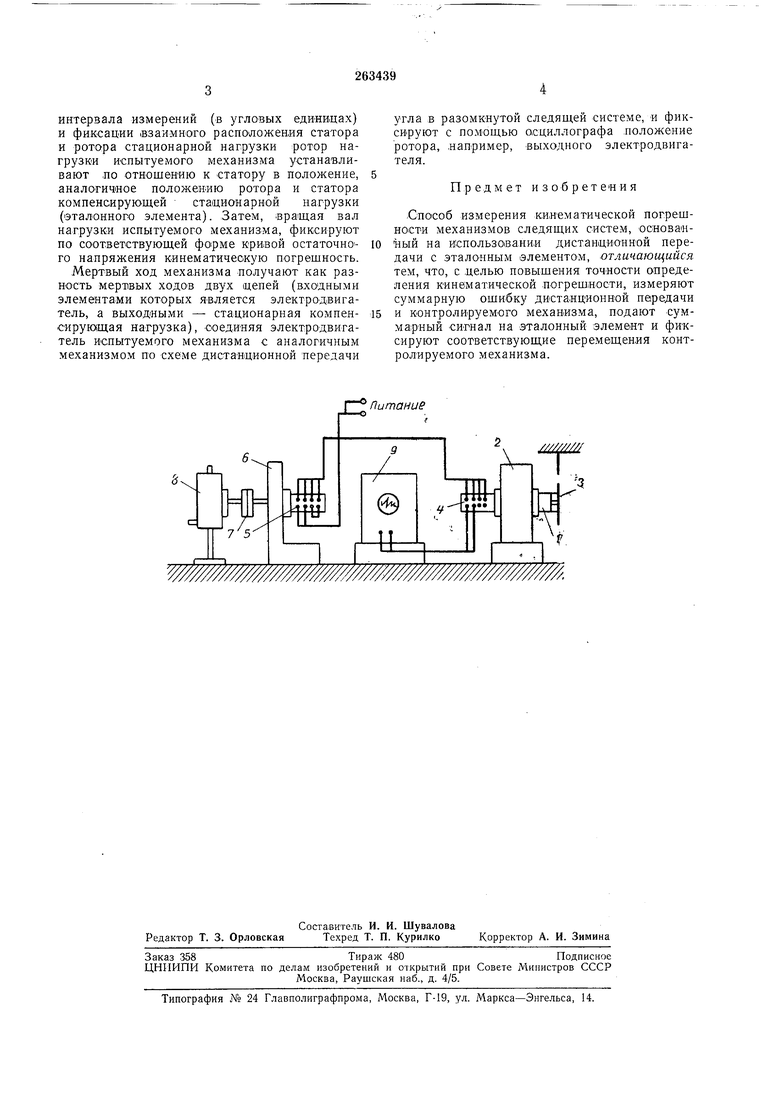
На чертеже изображена установка для измерений кинематической погрешности механизмов следящих систем предлагаемым способом.
Установка содержит электродвигатель / испытуемого механизма, испытуемый механизм 2, устройство 3 для отсчета угловых положений вала, электрическую нагрузку 4, компенсирующую стационарную нагрузку 5, Приспособление 6 для установки компенсирующей нагрузки, соединительную муфту 7, измерительное средство 8, осциллограф 9.
ством 3 для отсчета угловых положений вала. Электрическую нагрузку 4, являющуюся выходным 1элементом проверяемой цепи механизма, монтируют по определенной схеме с компенсирующей стационарной нагрузкой 5, которая выбирается в зависимости от параметров электрической нагрузки механизма. Нагрузку 5 устанавливают в приспособление 6, позволяющее плавно и медленно поворачиВать ее ротор, соединенный через муфту 7 с измерительным средством 8 (например, оптической делительной головкой).
Кинематическую погрешность определяют путем ее измерения совместно с ошибкой дистанционной передачи разомкнутой следящей системы, которую затем исключают из результатов измерения. Вращая элемент испытуемой цепИ в определенную сторону, полностью выбирают мертвый ход дистанционной передачи и устанавливают ведущий элемент .в положение, удобное для снятия значений угловых перемещений вала.
Ротор компенсирующей стационарной нагрузки устанавливают так, чтобы угол между
отметками, нанесенными на роторе и статоре, был такиМ же, как я на электрической нагрузке механизма. Продолжая медленно вращать ротор ко.мпенсирующей стационарной нагрузки, добиваются по экрану осциллограинтерзала измерений (в угловых единицах) и фиксации взаимного расположения статора и ротора стационарной нагрузки ротор нагрузки испытуемого механизма устанавливают по отношению к статору в положение, аналогичное положению ротора и статора компенсирующей стационарной нагрузки (эталонного элемента). Затем, вращая вал нагрузки испытуемого механизма, фиксируют по соответствующей фо1рме кривой остаточного напряжения кинематическую погрешность. Мертвый ход механизма получают как разность мертвых ходов двух цепей (входными элементами которых является электродвигатель, а выходными - стационарная компенсирук щая нагрузка), соединяя электродвигатель испытуемого механизма с аналогичным механизмом по схеме дистанционной передачи
угла в разомкнутой следящей системе, и фиксируют с помощью осциллографа .положение ротора, например, выходного электродвигателя.
Предмет изобретения
-Способ измерения кинематической погрешности механизмов следящих систем, основанный на использовании дистанционной передачи с эталонным элементом, отличающийся тем, что, с целью повышения точности определения кинематической погрешности, измеряют суммарную ошибку дистанционной передачи
и контролируемого механизма, подают суммарный сигнал на эталонный элемент и фиксируют соответствующие перемещения контролируемого механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |
| Стенд для измерения динамических моментов в зубчатых или фрикционных передачах | 1979 |
|
SU859849A1 |
| Устройство для контроля параметров синусно-косинусного вращающегося трансформатора | 1989 |
|
SU1720128A1 |
| Система управления опорно-поворотными устройствами антенной установки | 2024 |
|
RU2822869C1 |
| Самопишущий прибор для непрерывного контроля кинематической погрешности передач и измерения углов поворота | 1960 |
|
SU134999A1 |
| Устройство для динамометрических исследований электродвигателей | 1986 |
|
SU1543260A1 |
| Способ настройки моментного вентильного электродвигателя | 1981 |
|
SU1008857A1 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ФУНКЦИИ ПОГРЕШНОСТИ | 1973 |
|
SU408364A1 |
