Известны самопишущие приборы для непрерывного контроля кинематической погрешности передач и измерения углов поворота с применением в качестве промежуточного источника - электрической энергии, регистраторов углового поворота и устройства, записывающего сигналы от контролируемых конечных звеньев. Однако эти приборы не обеспечивают возможности измерений относительного рассогласования угловых поворотов конечных звеньев особо точных передач.
В предлагаемом приборе этот недостаток устранен благодаря выполнению регистраторов углового ловорота в виде круговых емкостных преобразователей (датчиков). Один из этих датчиков состоит из статора и ротора, жестко связанного с первым контролируемым звеном, а второй- .из двух полудатчиков с общим ротором, вращающимся от индивидуального привода, и двумя статорами - одним неподвижным и другим - медленно вращающимся (тихоходным) от второго конечного звена контролируемого механизма. Кроме того, питание датчиков переменным током дает возможность сфазировать их исходное положение и производить контроль при периодических остановках кинематической цепи. В приборе также применены усилители частоты сигналов датчиков, преобразователь частот и фазовый дискриминатор.
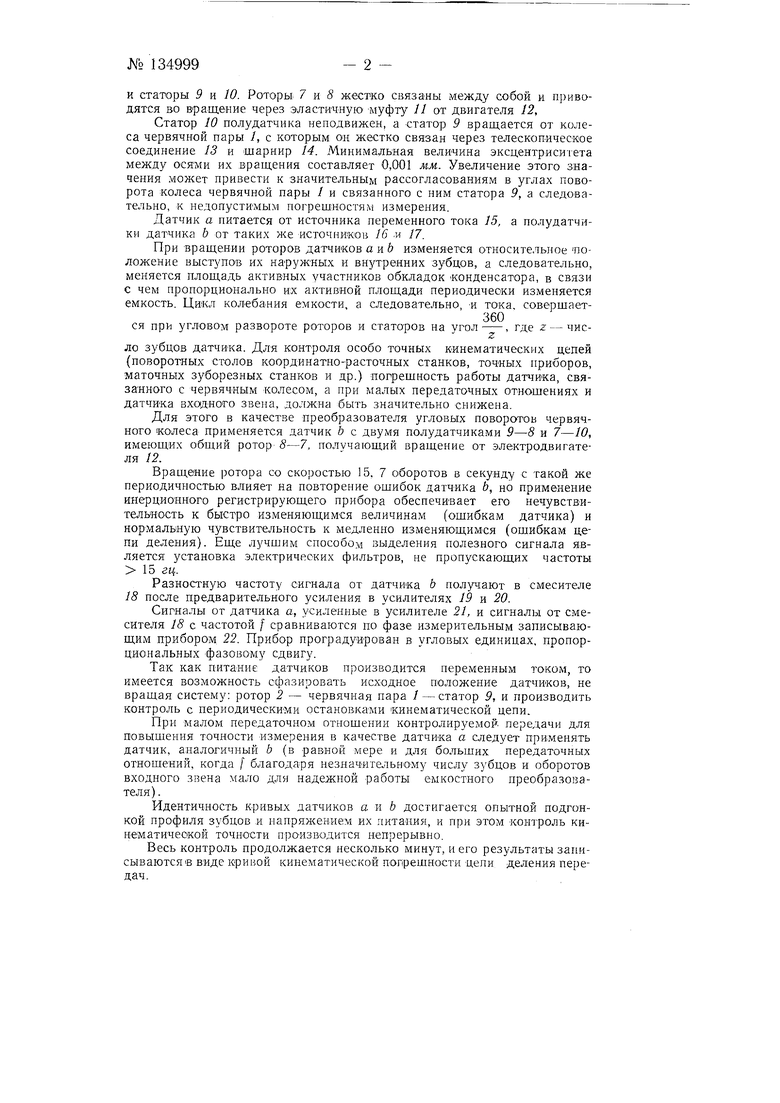
На чертеже изображена блок-схема прибора.
В качестве регистраторов углового поворота червяка и колеса (червячной пары /) используются емкостные преобразователи (датчики) а и Ь. Датчик а состоит из ротора 2 и статора 3. На наружной стороне статора нарезаны зубцы. Ротор 2, жестко связанный с червяком, приводится во вращение от двигателя 4 через эластичную 5 и маховик 6. Датчик Ь состоит из двух полудатчиков, имеющих роторы 7 и 5
№ 134999 2 и статоры 9 и 10. Роторы 7 и S жестко связаны между собой и П1)иводятся во вращение через эластичную муфту // от двигателя 12,
Статор 10 полудатчика неподвижен, а статор 9 вращается от колеса червячной пары /, с которым он жестко связан через телескопическое соединение 13 и шарнир 14. Минимальная величина эксцентриситета между осями их вращения составляет 0,001 мм. Увеличение этого значения может привести к значительным рассогласованиям в углах поворота колеса червячной пары / и связанного с ним статора 9, а следовательно, к недопустимым погрешностям измерения.
Датчик а питается от источника переменного тока 15, а полудатчики датчика b от таких же источников 16 -и 17.
При вращении роторов датчиков а иЬ изменяетчгя относительное положение выступов их нарулсных и внутренних зубцов, а следовательно, меняется площадь активных участников обкладок конденсатора, в связи с чем пропорционально их активной площади периодически изменяется емкость. Цикл колебания емкости, а следовательно, и тока, совершается при угловом развороте роторов и статоров на угол, где z - число зубцов датчика. Для контроля особо точных кинематических цепей {поворотных столов координатно-расточных станков, точных приборов, маточных зуборезных станков и др.) погрешность работы датчика, связанного с червячным колесом, а при малых передаточных отношениях и датчика входного звепа, до.чжна быть значительно снижена.
Для этого в качестве преобразователя угловых поворотов червячного колеса применяется датчик b с двумя полудатчиками 9-5 и 7-10, имеющих общий ротор 8-7, получающий вращение от электродвигателя 12.
Вращение ротора со скоростью 15. 7 оборотов в секунду с такой же периодичностью влияет на повторение ошибок датчика Ь, но применение инерционного регистрирующего прибора обеспечивает его нечувствительность к быстро изменяющимся величинам (ошибкам датчика) и нормальную чувствительность к медленно изменяющимся (ошибкам цепи деления). Еще лучшим способом выделения полезного сигнала является установка электрических фильтров, не пропускающих частоты 15 гц.
Разностную частоту сигнала от датчика b получают в смесителе 18 после предварительного усиления в усилителях 19 и 20.
Сигналы от датчика а, усиленные в усилителе 21, и сигналы от смесителя 18 с частотой / сравниваются по фазе измерительным записывающим прибором 22. Прибор проградуирован в угловых единицах, пропорциональных фазовому сдвигу.
Так как питание датчиков производится переменным током, то имеется возможность сфазировать исходное положение датчиков, не вращая систему: ротор 2 - червячная пара / - статор 9, и производить контроль с периодическими остановками кинематической цепи.
При малом передаточном отношении контролируемой передачи для повышения точности измерения в качестве датчика а следует применять датчик, аналогичный b (в равной мере и для больших передаточных отношений, когда / благодаря незначительному числу зубцов и оборотов входного звена мало для надежной работы емкостного преобразователя).
Идентичность кривых датчиков а и b достигается опытной подгонкой профиля зубцов и напряжением их питания, и при этом контроль кинематической точности производится непрерывно.
Весь контроль продолжается несколько минут, и его результаты записываются в виде кривой кинематической погрешности цепи деления передач.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ОДНОПРОФИЛЬНОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕСвПТБФЯ| S№EPT0S | 1972 |
|
SU429262A1 |
| Способ контроля преобразователей угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1656681A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1980 |
|
SU896389A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ТОЧНОСТИ МЕХАНИЗМОВ | 1963 |
|
SU453563A1 |
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1021936A1 |
| Устройство для контроля кинематической погрешности синусных механизмов | 1980 |
|
SU896388A1 |
| Устройство для измерения кинематической погрешности зубчатых передач | 1976 |
|
SU574605A1 |
| Способ измерения кинематической погрешности механизмов с дробным передаточным отношением | 1985 |
|
SU1325295A1 |

