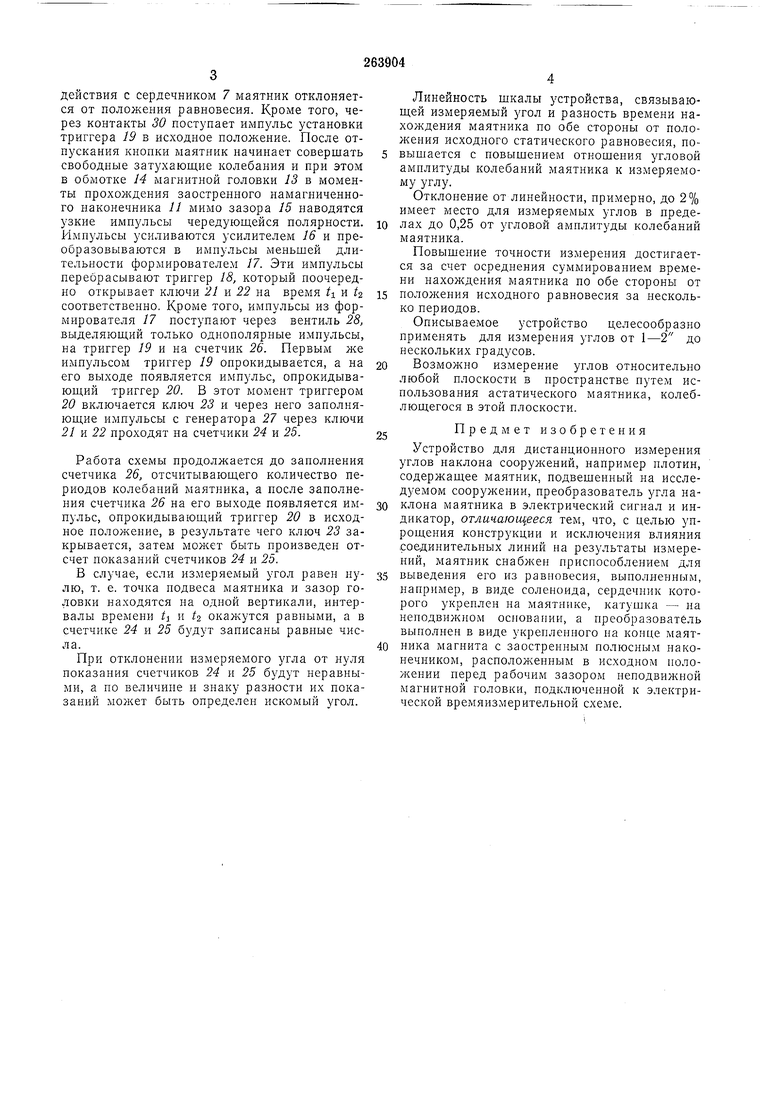
Изобретение относится к области точного приборостроения, в частности, к приборам для дистанционного измерения наклонов сооружений, например гидротехнических плотин. Известны устройства аналогичного назначения, содержащие маятник, подвегиенный на исследуемом сооружении, преобразователь угла наклона маятника в электрические сигналы (например, индуктивный) и индикатор. Иредлагаемое устройство отличается от известных тем, что на точность показаний не влияет изменение параметров линии связи, соединяющей датчик и вторичный измерительный прибор, нанример длина линии, состояние изоляции проводов, что имеет значение в условиях, характерных для исследования гидротехнических плотин. Для достижения этого маятник в предлагаемом устройстве приспособлением для выведения его из равновесия, выполненным, нанример, в виде соленоида, сердечник которого укреплен на мятнике, катущка - на неподвижном основании, а преобразователь выполпеп в виде укрепленного на конце маятника магнита с заостренным полюсным наконечником, расположенным в исходном положении перед рабочим зазором неподвижной магнитной головки, нодключенной к электрической врсмяизмерительной схеме. На фиг. I нриведена принципиальная схема предлагаемого устройства в двух проекциях; на фиг. 2 - электрическая схема его времяизмерительной части. Качающийся в процессе измерений маятник содержит массу 1 на подвесе 2; он нодвешсн па шарнпрной опоре, образованной траверсой 3, четырьмя плоскими нружинамн 4 и кронщтейном 5, укреиленным на исследуемом объекте 6. Иа подвесе 2 крепится сердечник 7, а на объекте 6, против него, посредством кропщтейна 8 - соленоид 9. К массе 1 прикреплен постоянный магнит 10 с заостренным полюсным наконечником 11. Под маятником с объектом 6 связана также расположенная на стойке 12 магнитная головка 13 с обмоткой 14; зазор 15 нри монтаже устройства устанавлнвается против наконеч)П1ка // ia мишь мальном расстоянни. Головка /5 соединена с времяизмерительной схемой, предпочтительно счетчпкового типа. Схема содержит усилитель 16, формирователь 17 импульсов, триггеры 18-20, ключи 21-23, счетчики 24-26, генератор 27 заполняющих импульсов, вентиль 28, спаренную кнонку (контакты) 29 и 30 и источник тока 31.
действия с сердечником 7 маятник отклоняется от положения равновесия. Кроме того, через контакты 30 поступает импульс установки триггера 19 в исходное положение. После отпускания кнопки маятник начинает совершать свободные затухающ,ие колебания и при этом в обмотке 14 магнитной головки 13 в моменты прохождения заостренного намагниченного наконечника 11 мимо зазора 15 наводятся узкие импульсы чередующейся полярности. Импульсы усиливаются усилителем 16 и преобразовываются в импульсы меньшей длительности формирователем 17. Эти импульсы перебрасывают триггер 18, который поочередно открывает ключи 21 и 22 на время ti и t соответственно. Кроме того, импульсы из формирователя 17 поступают через вентиль 28, выделяюш,ий только однополярные импульсы, на триггер 19 и на счетчик 26. Первым же импульсом триггер 19 опрокидывается, а на его выходе появляется импульс, опрокидывающий триггер 20. В этот момент триггером
20включается ключ 23 и через него заполняющие импульсы с генератора 27 через ключи
21и 22 проходят на счетчики 24 и 25.
Работа схемы продолжается до заполнения счетчика 26, отсчитывающего количество периодов колебаний маятника, а после заполнения счетчика 26 на его выходе появляется импульс, опрокидывающий триггер 20 в исходное положение, в результате чего ключ 23 закрывается, затем молсет быть произведеп отсчет показаний счетчиков 24 и 25.
В случае, если измеряемый угол равен нулю, т. е. точка подвеса маятника и зазор головки находятся на одной вертикали, интервалы времени /i и t окажутся равными, а в счетчике 24 и 25 будут записаны равные числа.
При отклонении измеряемого угла от нуля показания счетчиков 24 и 25 будут неравными, а по величине и знаку разности их показаний может быть определеп искомый угол.
Линейность шкалы устройства, связывающей измеряемый угол и разность времени нахождения маятника по обе стороны от положения исходного статического равновесия, повышается с повышением отношения угловой амплитуды колебаний маятника к измеряемому углу.
Отклонение от линейности, примерно, до 2% имеет место для измеряемых углов в пределах до 0,25 от угловой амплитуды колебаний маятника.
Повышение точности измерения достигается за счет осреднения суммированием времени нахождения маятника по обе стороны от
положения исходного равновесия за несколько периодов.
Описываемое устройство целесообразно применять для измерения углов от 1-2 до нескольких градусов.
Возможно измерение углов относительно любой плоскости в пространстве путем использования астатического маятника, колеблющегося в этой плоскости.
Предмет изобретения
Устройство для дистанционного измерения углов наклона сооружений, например плотин, содержащее маятник, нодвешенный на исследуемом сооружении, преобразователь угла наклона маятника в электрический сигнал и индикатор, отличающееся тем, что, с целью упрощения конструкции и исключения влияния соединительных линий на результаты измерений, маятник снабжен приспособлением для
выведения его из равновесия, выполненным, паиример, в виде соленоида, сердечн 1к которого укреплен на маятнике, катушка - на. неподвижном основапии, а преобразователь выполнен в виде укрепленного па конце маятника магнита с заостренным полюсны.м наконечником, расположенным в исходном положении перед рабочим зазором неподвижной магнитной головки, подключенной к электрической времяизмерительной схеме.
ЧЦ
2L.
-1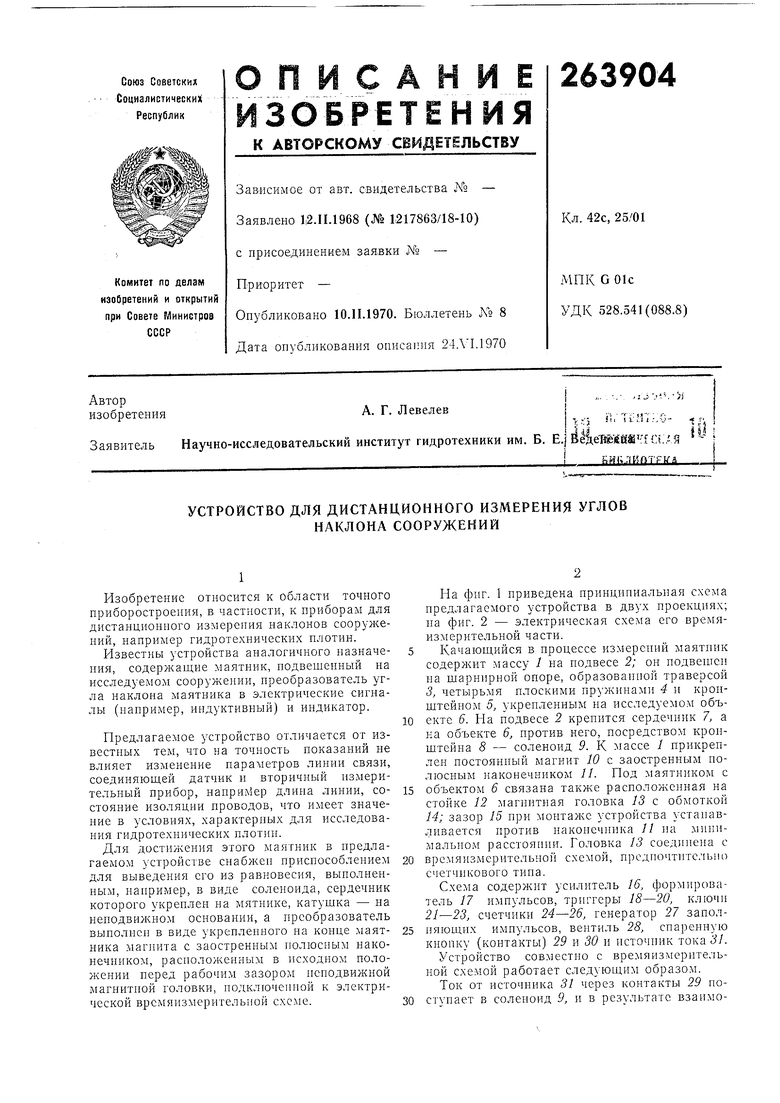
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения горизонтальных ускорений | 2021 |
|
RU2838579C2 |
| Маятниковый инклинометр для определения углов наклона в двух взаимоперпендикулярных плоскостях | 1974 |
|
SU617025A3 |
| Устройство для измерения малых углов наклона объекта | 1977 |
|
SU617675A1 |
| ИМПУЛЬСНЫЙ МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2432578C2 |
| УСТРОЙСТВО для ИССЛЕДОВАНИЯ ПОСЛЕДОВАТЕЛЬНЫХ ДВИГАТЕЛЬНЫХ РЕАКЦИЙ | 1969 |
|
SU249550A1 |
| Рефлексометр | 1981 |
|
SU992024A1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| УСТРОЙСТВО ДЛЯ ФИКСИРОВАНИЯ И УЧЕТА ПРЕДЕЛЬНЫХ КОЛЕБАНИЙ ПРИ ТРАНСПОРТИРОВКЕ | 2006 |
|
RU2316008C1 |
| Способ измерения логарифмического декремента колебаний | 1979 |
|
SU781683A1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
а
,ij,
i /
5, гг
29 3J
