Изобретение относится к измерительной технике и может быть использовано для измерения горизонтальных ускорений.
Основу структуры средств измерения ускорений составляют датчик и электронный блок. Первичным преобразователем датчика служит инерционная масса (груз), сопряженная с возвратным упругим звеном. Величина ускорения (модуль) выявляется вторичным преобразователем, сигнал которого отражает смещение груза. Направление ускорения определяется направляющей смещения груза.
Иногда направление ускорения элементов исследуемого объекта локализовано. Типичный случай - движение железнодорожного вагона по горизонтальным криволинейным путям. В этом случае вектор ускорения находится в одной плоскости.
Обратимся к известным техническим решениям для измерения ускорений.
В датчике ускорения (патент RU 2247992 С2, опубл. 10.03.2005) в качестве упругого элемента использована коническая винтовая пружина. Вторичное преобразование индуктивное - инерционный сердечник электрической катушки при перемещении изменяет величину индуктивности катушки. В этом датчике присутствует постоянное (Кулоново) трение в направляющих движения, что создает зону застоя. При изображении движения на фазовой плоскости зона застоя фзопределяется коэффициентом трения ƒmp:ϕ3 = arctgfmp (Шарыгин Л.Н., Сорокин А.А. Автоколебательные системы в средствах измерения и контроля: учебное пособие - Владимир: изд-во «Атлас», 2016, ISBN 978-5-903087-53-2. - см. с. 10). Конструкция датчика сложна и нетехнологична. Измерение величины индуктивности катушки предполагает отдельную электрическую цепь.
В качестве упругих элементов используют упругие подвесы (патент RU 2441246 С1, опубл. 27.01.20212, патент RU 2485524 С2, опубл. 20.06.2013), плоские пружины (патент RU 2063000 С1, опубл. 27.06.1996), растяжки (патент RU 147269 U1, опубл. 27.10.2014). Находят применение кремниевые маятники (патент RU 2492490 С1, опубл. 10.09.2013; патент RU 2526789 С1, опубл. 27.08.2014). Смещение инерционной массы под действием измеряемого ускорения преобразуют с применением емкостных преобразователей (патент RU 2517812 С1, опубл. 27.05.2014; патент RU 2521141 С2, опубл. 27.06.2014), магнитоэлектрических преобразователей (патент RU 172727 U1, опубл. 21.07.2017). Применяют автоколебательные промежуточные звенья (патент RU 2436106 С2, опубл. 10.12.2011). В устройстве для измерения виброускорений (патент RU 2454645 С1, опубл. 27.06.2012) использовано оптическое преобразование.
Известным средствам измерения свойственны общие недостатки:
- низкая чувствительность, в основном за счет высокой жесткости упругого звена датчика;
- узкий диапазон измерения, особенно в области малых значений измеряемой величины.
В качестве прототипа принято устройство для измерения импульсных ускорений по патенту RU 147269 U1 МПК G01P 15/11, опубл. 27.10.2014. В этом устройстве, содержащем датчик с чувствительным элементом, составленным грузом и упругим звеном (шарниром) с магнитоэлектрическим преобразователем, включающем магнитную цепь с электрической катушкой, постоянным магнитом и магнитопроводом, и электронный юлок, электрически связанный с датчиком, упругий шарнир датчика выполнен в виде растяжки круглого сечения, груз выполнен из магнитопроводиого материала цилиндрической формы и закреплен коаксиалыю на средней части рабочей длины растяжки, магнитная цепь магнитоэлектрического преобразователя составлена из кольцеобразного постоянного магнита осевой намагниченности, расположенного в перпендикулярной растяжке плоскости магнитопроводящей бочкообразной формы по одному торцу постоянного магнита и группы магнитопроводов лепестковой формы по его другому торцу с возможностью магнитного взаимодействия с грузом. Электрическая катушка выполнена в виде группы катушек, каждая из которых установлена между торцом постоянного магнита и соответствующим магнипроводом лепестковой формы, при этом в исходном положении груза зазоры между всеми магнитопроводами и грузом одинаковы.
Электронный блок снабжен источником питания с несколькими постоянными напряжениями разного уровня, содержит n входов по количеству электрических катушек датчика, n ограничителей уровня, первые входы которых являются входами электронного блока, а их вторые входы соединены с выходом первого уровня блока питания. Выходы ограничителей уровня подключены к установочным входам соответствующих n входных RS-триггеров, прямые выходы последних являются входами n-входового логического элемента ИЛИ, его выход являются входом измерителя амплитуды в составе делителя напряжения и m компараторов. Каждый выход измерителя амплитуды через RS-триггер и шифратор соединен с цифровым табло индикатора, а светодиоды направления последнего подключены к одноименным прямым выходам RS-триггеров, при этом шина сброса триггеров соединена с соответствующим выходом блока питания через кнопку сброса.
В рассматриваемом устройстве электронный блок снабжен двумя группами электронных ключей, в первую группу входит один электронный ключ, его первый вход соединен с выходом логического элемента ИЛИ, а выход - со входом измерителя амплитуды, вторая группа из n электронных ключей первыми входами соединена с прямыми выходами входных RS-триггеров, а выходами - с одноименными светодиодами индикатора, при этом вторые входы всех электронных ключей соединены с соответствующими выходами блока питания.
Этому устройству свойственны те же недостатки, что и аналогам:
- низкая чувствительность по причине высокой поперечной жесткости растяжки. По этой же причине диапазон измерения ограничен в области малых значений измеряемой величины;
- имеет место погрешность измерения, обусловленная петлей магнитного гистерезиса в материале магнитопроводов.
Техническим результатом предлагаемого решения является расширение диапазона измерения. Решаются задачи:
1. Разработка простой и технологичной конструкции датчика, позволяющего получить:
- высокую чувствительность и широкий диапазон измерения модуля ускорения;
- первичную информацию о направлении ускорения с высоким разрешением.
2. Разработка функциональной схемы электронного блока на типовых элементах электроники, позволяющей индицировать значения модуля и направления измеряемого ускорения.
3. Обоснование принимаемых решений.
Указанный выше технический результат достигается тем, что устройство для измерения горизонтальных ускорений, содержащее датчик с чувствительным элементом, составленным грузом цилиндрической формы из магнитопроводного материала и упругим шарниром, с преобразователем перемещения, и электронный блок, электрически связанный с датчиком, снабжено демпфером колебаний груза, а упругий шарнир выполнен в виде подвеса цилиндрического сечения, преобразователь перемещения выполнен в виде набора одинаковых электропроводных электроизолированных пластин, каждая из которых образует с грузом электрическую емкость, при этом в исходном положении электропроводные пластины расположены с постоянным шагом по образующей цилиндрической коаксиальной грузу поверхности, при этом демпфер колебаний груза выполнен в виде постоянного магнита плоской круговой формы с осевой намагниченностью, который установлен с возможностью магнитного взаимодействия неподвижно под данной частью груза с регулируемым зазором, а электронный блок выполнен многоканальным, с количеством каналов равным количеству электропроводных пластин преобразователя перемещения, в составе трех функциональных блоков - функционального блока модуля ускорения, функционального блока направления ускорения и функционального блока фиксации результата. Указанный технический результат также достигается тем, что:
- функциональный блок модуля ускорения содержит в каждом канале последовательно соединенные резонансный усилитель и частотный детектор, при этом входы резонансного усилителя соединены с обкладками электрической емкости преобразователя перемещения, а выход частотного детектора является выходом функционального блока модуля ускорения;
- функциональный блок направления ускорения содержит в каждом канале интегратор, формирователь импульсов, выходной конъюнктор и межканальные элементы - источник опорного напряжения, дизъюнктор направления и генератор тактовой частоты, при этом первый вход интегратора соединен с выходом функционального блока модуля ускорения, его второй вход с выходом генератора опорной частоты, а третий - с выходом дизъюнктора фиксации направления функционального блока фиксации результата, выход интегратора соединен с первым входом формирователя импульсов, второй вход которого связан с динамическим входом генератора тактовой частоты, выход последнего является первым входом выходного конъюктора, его второй вход связан с выходом формирователя импульсов, а выход является выходом функционального блока направления ускорения;
- функциональный блок фиксации результата содержит в каждом канале RS-триггер, конъюктор модуля, светодиод индикатора направления и межканальные элементы - дизъюнктор фиксации направления, дизъюнкторфиксации модуля, преобразователь амплитуда-код и индикатор результата, при этом динамический вход сброса RS-триггера связан с выходом генератора тактовой частоты, установочный вход - с выходом функционального блока направления ускорения, а его выход - со светодиодом индикатора направления, канальным выходом дизъюнктора фиксации направления и первым входом конъюнктора модуля, второй вход последнего связан с выходом частотного детектора функционального блока модуля ускорения, выход конхюнктора модуля соединен с канальным входом дизъюнктора фиксации модуля, выход последнего через преобразователь амплитуда-код соединен с индикатором результата.
Конструкция устройства для измерения горизонтальных ускорений поясняется чертежами:
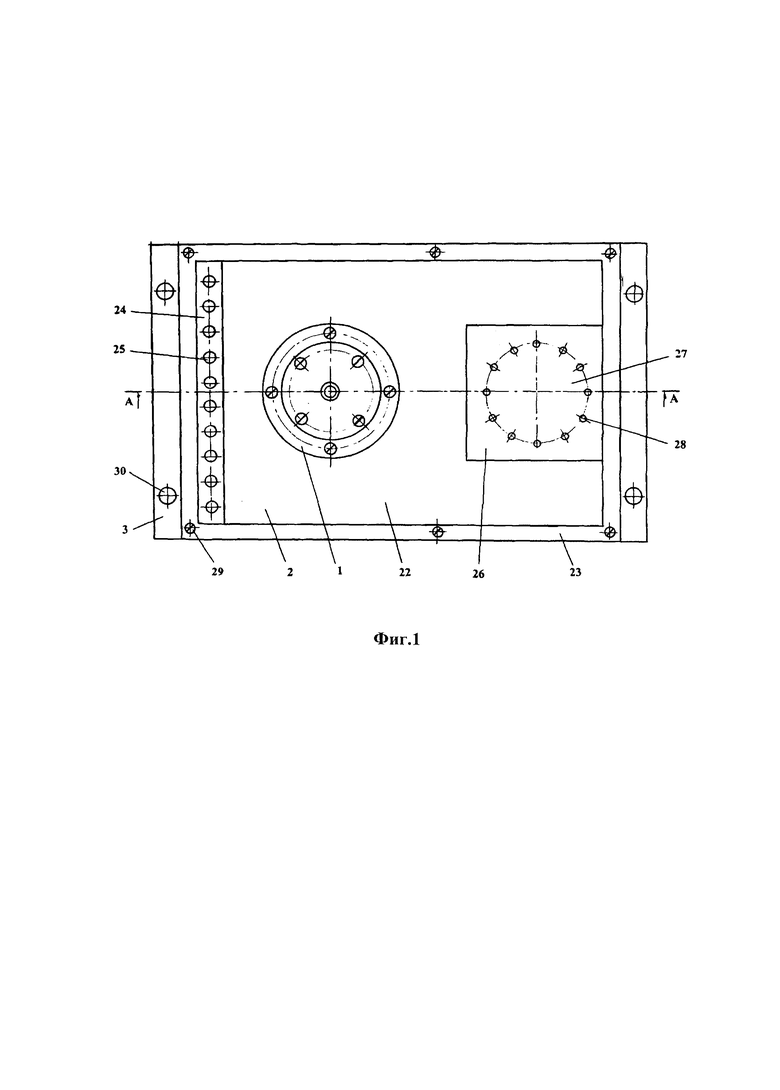
Фиг. 1. Вид сверху;
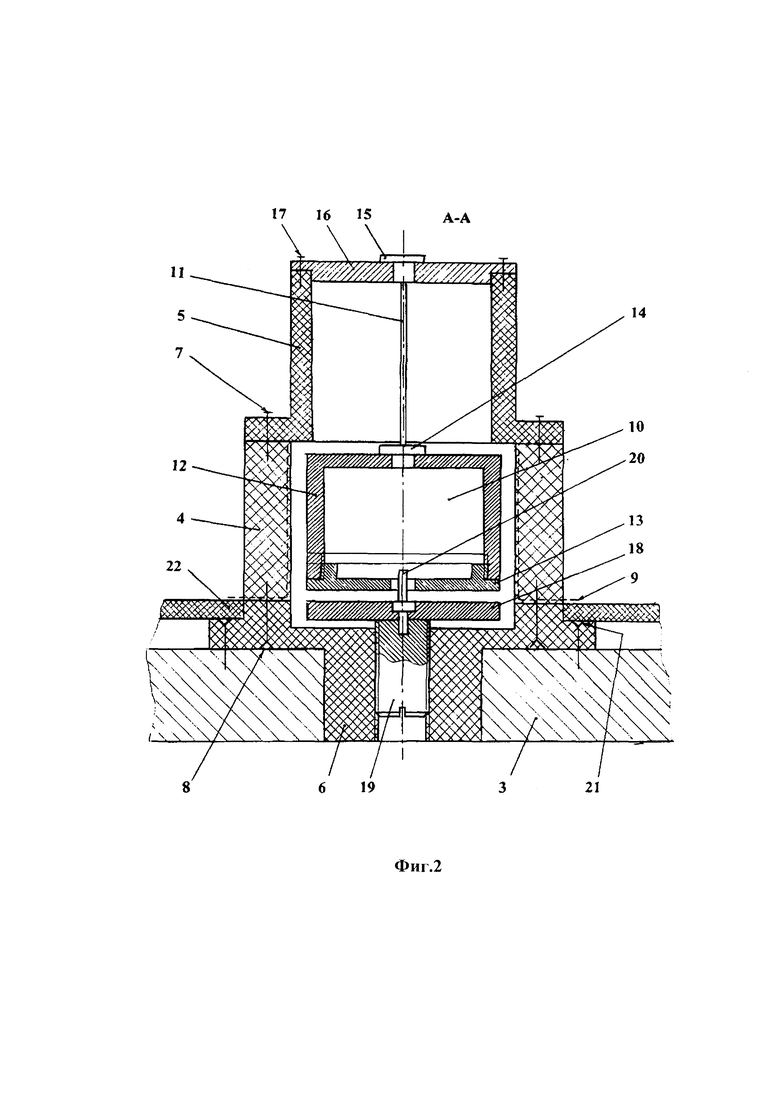
Фиг. 2. Разрез А-А по фиг.1;
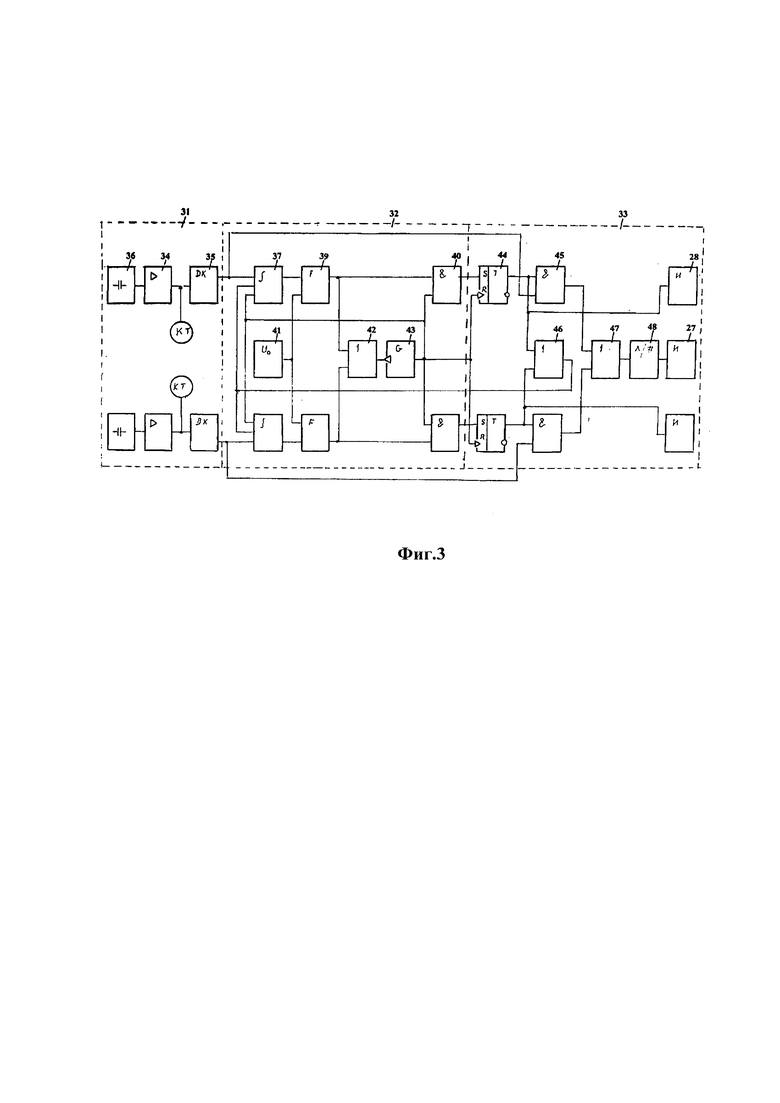
Фиг. 3. Функциональная схема электронного блока;
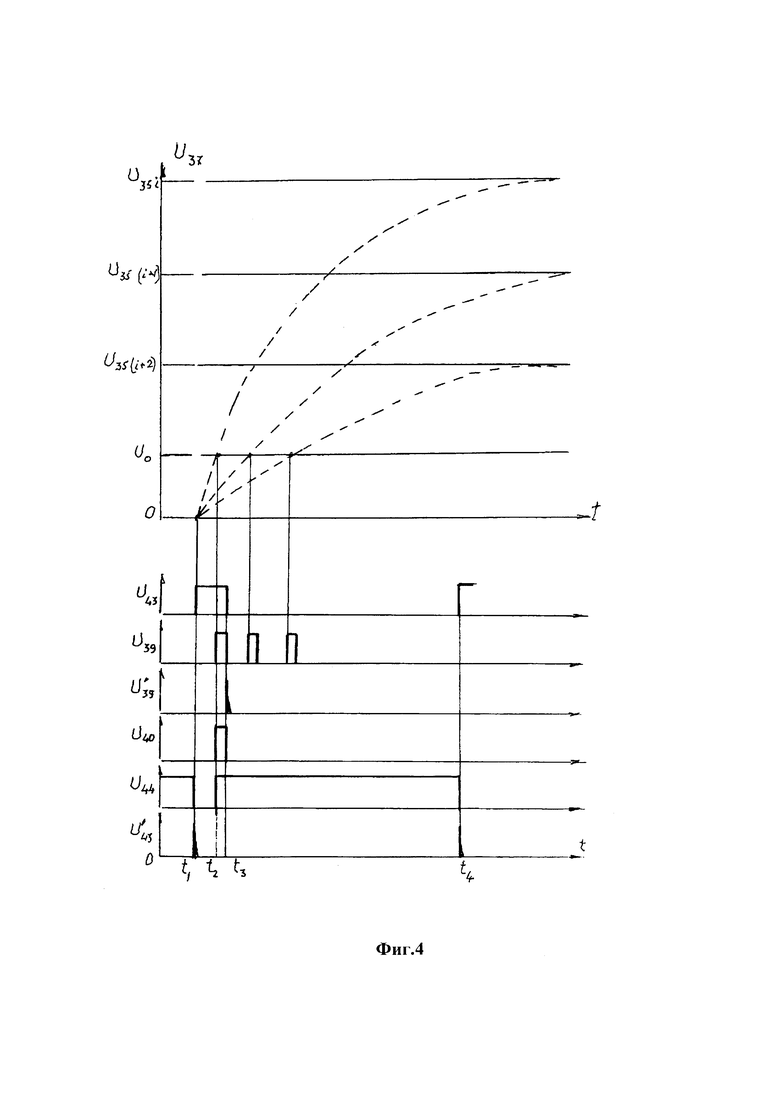
Фиг. 4. Эпюры напряжений на выходах элементов функциональной схемы;
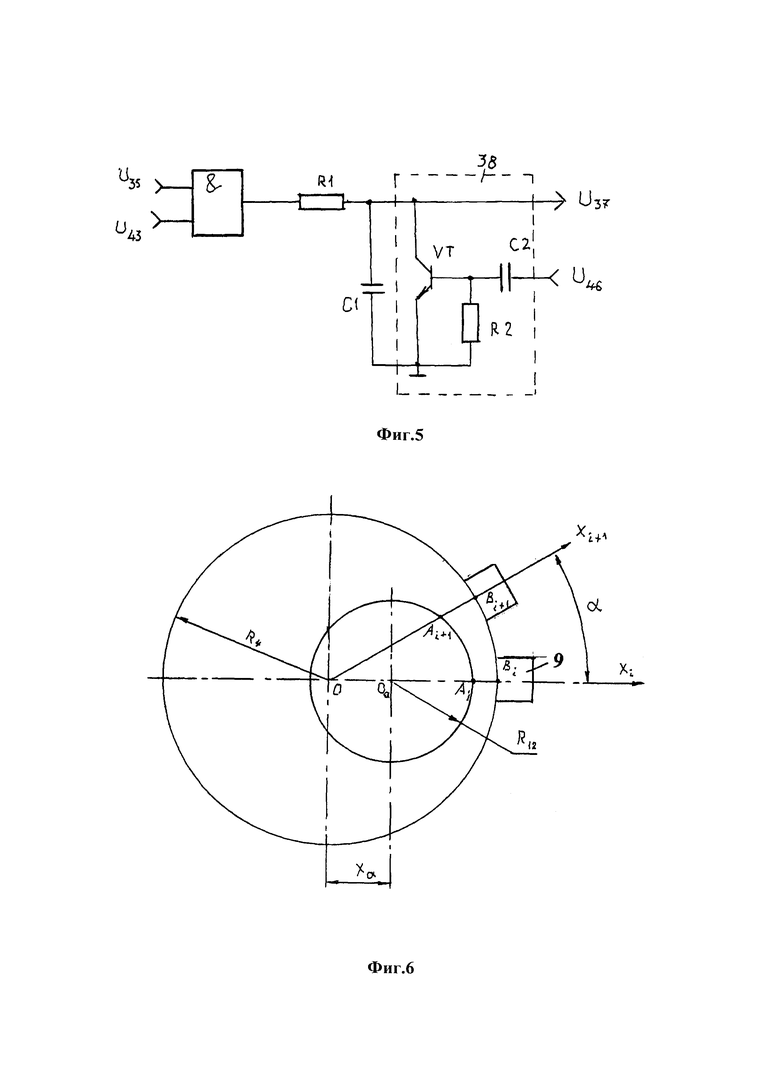
Фиг. 5. Электрическая принципиальная схема интегратора;
Фиг. 6. Расчетная схема.
Принятые обозначения
1. Датчик
2. Электронный блок
3. Основание
4. Втулка преобразователя
5. Втулка подвеса
6. Втулка демпфера
7. Винты крепления втулок 4,5
8. Винты крепления втулок 5,6
9. Электропроводные пластины
10. Груз
11. Подвес
12. Корпус груза
13. Магнитопровод груза
14. Цанговый зажим груза
15. Цанговый зажим подвеса
16. Крышка
17. Винты крепления крышки
18. Постоянный магнит демпфера
19. Резьбовой ползун демпфера
20. Ступенчатый штифт демпфера
21. Винты крепления датчика к основанию
22. Печатная плата
23. Рамка печатной платы
24. Колодка с гнездами КТ
25. Гнезда контрольных точек
26. Коробка источника электропитания
27. Индикатор результата
28. Светодиоды индикатора направления
29. Винты крепления электронного блока
30. Монтажные отверстия основания
31. Функциональный блок модуля ускорения
32. Функциональный блок направления ускорения
33. Функциональный блок фиксации результата
34. Резонансный усилитель
35. Частотный детектор
36. Преобразователь перемещения
37. Интегратор
38. Электронный ключ интегратора
39. Формирователь (коротких прямоугольных) импульсов
40. Выходной конъюнктор
41. Источник опорного напряжения
42. Дизъюнктор направления
43. Генератор тактовой частоты
44. RS-триггер
45. Конъюнкор модуля
46. Дизъюнктор фиксации направления
47. Дизъюнктор фиксации модуля
48. Преобразователь амплитуда-код
Предлагаемое устройство выполнено в виде двух основных сборочных единиц - датчика 1 и электронного блока 2, которые смонтированы на общем основании 3 прямоугольной формы. В зависимости от условий применения эти сборочные единицы могут закрываться кожухом, имеющим окно для индикатора результата.
Корпус датчика представлен тремя электроизоляционными втулками - втулка преобразователя 4, втулка подвеса 5 и втулка демпфера 6. Втулки соединяются винтами 7,8, при этом винты 8 имеют головку потай. На этапе предварительной сборки сопряжения втулок снабжаются базирующими штифтами. На внутренней цилиндрической поверхности втулки преобразователя по образующей цилиндра выполнена с постоянным угловым шагом группа прямоугольных пазов, сопряженно с ними на нижней торцовой поверхности выполнены аналогичные пазы. В эти пазы уложены и закреплены клеем электропроводные пластины 9 Г-образной формы. Нижние концы этих пластин выступают за внешний контур втулки и служат для присоединения к электронному блоку. Из соображений наглядности на фиг.2 электропроводные пластины 9 показаны пунктирной линией. Заметим, что для снижения требований по точности к исходным деталям целесообразно заготовки втулки 4 и электропроводных пластин изготавливать с припуском, а после сборки образованную сборочную единицу доработать до расчетных размеров совместно по внутреннему диаметру и торцам.
Чувствительный элемент датчика составлен из инерционного элемента в виде груза 10 цилиндрической формы и упругого шарнира в виде подвеса 11 из проволоки круглого сечения. С целью расширения возможных вариантов массы груз выполнен составным. Основу составляет корпус 12 в виде перевернутой чаши из электропроводного материала. В раскрытой данной части посредством резьбы закреплен магнитопровод 13, имеющий центральное отверстие. В верхней части корпуса 12 установлен цанговый зажим 14.
Подвес 11 выполняют из материалов с узкой петлей механического гистерезиса, обычно это кобальтовые или никелевые сплавы, например, сплав Н41ХТА. Для организации крепления подвеса предусмотрен цанговый зажим 15, который закреплен на крышке 16, установленной на втулке подвеса 5 с помощью винтов 17. Цанговые зажимы являются стандартными изделиями, поэтому на фиг.2 они показаны условно.
В датчике предусмотрен демпфер колебаний груза. Демпфер представлен постоянным магнитом 18 осевой намагниченности в виде шайбы и резьбовым ползуном 19. Ползун установлен в центральное отверстие втулки демпфера 6. Крепление магнита на ползуне реализуется ступенчатым немагнитопроводным штифтом 20, который запрессован в центральном глухом отверстии резьбового ползуна. Верхняя часть ступенчатого штифта входит в отверстие магнитопровода 13, полученный зазор ограничивает величину предельного смещения груза.
Собранный датчик устанавливается в отверстие основания 3 и закрепляется винтами 21, имеющими головку потай. Угловое положение датчика относительно осевой линии основания согласовано с электронным блоком (см. ниже).
Элементы электронного блока смонтированы на печатной плате 22, которая установлена в рамку 23. На печатной плате размещены электронные компоненты, входящие в функциональную схему фиг.3, колодка 24 с гнездами 25 контрольных точек, и коробка 26 для размещения источника автономного электропитания. В верхней части коробки закреплен индикатор результата 27 в виде комбинации двух полей - центрального поля для цифровой индикации величины ускорения и кольцевого поля для индикации направления ускорения. На кольцевом поле размещены точечные светоизлучающие элементы 28 (светодиоды) с постоянным шагом в количестве равном количеству электропроводных пластин 9 датчика, при этом пространственное (угловое) положение каждой пары пластина - светодиод одинаково. Смонтированный электронный блок устанавливается на основании 3 и крепится винтами 29. На этапе установки, предварительно выступающие концы электропроводных пластин 9 датчика, отгибают вверх и обжимают по внешней поверхности втулки преобразователя 4. Это необходимо чтобы указанные концы пластин прошли через зазор между датчиком и отверстием платы 22. Окончательная операция установки - возвращают отогнутые концы пластин в исходное положение и подпаивают их к контактным площадкам печатной платы 22. Далее следует операция контроля качества. После этого изделие готово к использованию. Крепеж изделия на объекте исследования осуществляется с использованием монтажных отверстий 30 основания 3.
Обратимся к принципу выявления величины ускорения с использованием вышеизложенной конструкции датчика. Груз 10 чувствительного элемента совершает маятниковое движение. В реальной конструкции длина  подвеса 11 существенно больше горизонтального смещения х груза. Линеаризуя рассматриваемую систему уравнение движения груза массой т под действием ускорения a (t) запишется в виде:
подвеса 11 существенно больше горизонтального смещения х груза. Линеаризуя рассматриваемую систему уравнение движения груза массой т под действием ускорения a (t) запишется в виде:

где  - соответственно первая и вторая производные смещения;
- соответственно первая и вторая производные смещения;
h - интегральный коэффициент вязкого трения;
D - приведенная к центру масс груза поперечная жесткость подвеса.
Перепишем уравнение (1) в виде:

где  - коэффициент затухания;
- коэффициент затухания;
 - круговая частота чувствительного элемента.
- круговая частота чувствительного элемента.
При  имеет место колебательный режим с частотой
имеет место колебательный режим с частотой

Измеряемое ускорение a(t) представляет собой некоторую непрерывную функцию времени, которая для анализа может быть разложена в гармонический ряд Фурье

где an,bn - коэффициенты Фурье;
а0 - постоянная составляющая разложения. Отдельная гармоника ряда (6)

может иметь большую амплитуду

и ее частота может совпадать с собственной частотой ω0 чувствительного элемента:

что приведет к явлению резонанса и деформации функции преобразования.
Для исключения этого явления в предлагаемом устройстве предусмотрен демпфер колебаний. При смещении груза в магнитопроводе 13 за счет магнитного поля магнита 18 индуцируются вихревые токи

Коэффициент Ki зависит от электропроводности магнитопровода и магнитной индукции в зазоре.
За счет токов i появляется сила вязкого трения, определяемая интегральным коэффициентом трения h

Изменяя величину зазора путем поворота резьбового ползуна 19 можно приблизить колебательную систему к апериодической. Граничное условие:

Заметим, что некоторую долю в интегральный коэффициент терния h вносят силы трения о воздух и внутренне трение в материале подвеса.
На практике приближение к условию (12) осуществляют, наблюдая свободные затухающие колебания груза. Вращением резьбового ползуна добиваются примерно трех циклов свободных колебаний.
Смещение груза 10 под действием измеряемого ускорения отслеживается емкостным преобразователем. Каждая электропроводная пластина 9 совместно с цилиндрической поверхностью груза образует свою парциальную электрическую емкость. В исходном положении парциальные емкости равны:

где ε0 - физическая константа (диэлектрическая проницаемость вакуума);
ε - диэлектрическая проницаемость воздуха;
S - совместная площадь электропроводной пластины и части цилиндрической поверхности груза;
ΔХ0 - зазор по нормалям между указанными поверхностями.
Рассмотрим значения парциальных емкостей при смещении груза. На фиг.6 лучами Xi и Xi+1 показано угловое положение i-ой и (i+1)-ой электропроводных пластин, окружность радиуса R4 отражает внутреннюю поверхность втулки преобразователя 4, а окружность радиуса R10 - наружную поверхность груза. Угловой шаг электропроводных пластин обозначен α.
Под действием ускорения a(t) груз смещен по направлению Xi на величину Ха

Межэлектродный зазор i-ой парциальной емкости отражен отрезком AiBi и равен:

Межэлектродный зазор (i+1) парциальной емкости отражен отрезком Ai+1Bi+1 и может быть найден методами аналитической геометрии, или приближенно равен:

Для наглядности рассмотрим пример. Пусть R4=15 мм, R12=10 мм, Ха=2 мм, α=30°. Тогда получим
Пользуясь значениями межэлектродного расстояния (15), (16) получим величины парциальных емкостей


Следовательно

Электрические емкости (17), (18) образуют преобразователь перемещения. Конструктивно электрический вывод одной обкладки емкости - цилиндрической поверхности груза 10 - выполнен монтажным проводом, соединяющим цанговый зажим 15 подвеса и печатную плату 22, а другой обкладки - электропроводной пластины 9 - ее отогнутой частью, как отмечено выше.
Таким образом, в пределах угла π направлений симметричная парциальная емкость, совпадающая по направлению с измеряемым ускорением, будет расти быстрее соседних парциальных емкостей. В противоположном угле ж направлений при этом ситуация обратная.
Электронный блок 2 построен по функциональной схеме фиг.3. Этот блок выполнен многоканальным по количеству электрических пластин датчика и структурно поделен на три функциональных блока - модуля ускорения 31, направления ускорения 32 и фиксации результата 33. На чертеже элементы канала изображены в одну строку, а межканальные элементы - между канальных строк. Поскольку каналы идентичны, показано два, а позиционная нумерация выполнена для одного.
Функциональный блок модуля ускорения 31 содержит канальные элементы - резонансный усилитель 34 и частотный детектор 35. Первый вход резонансного усилителя электрически связан через упругий подвес 11 с грузом 10, а второй вход с соответствующей электропроводной пластиной 9 преобразователя 36 датчика 1.
Резонансный усилитель классического типа, он содержит подстроечную индуктивность L, которая совместно с емкостью преобразователя образует колебательный контур. Частота со выходного напряжения резонансного усилителя

отражает емкость С преобразователя, следовательно, величину измеряемого ускорения.
Частотный детектор преобразует сигнал резонансного усилителя в аналоговую функцию напряжения, пропорциональную частоте. Таким образом, на выходе функционального блока модуля ускорения будет аналоговая функция напряжения, отражающая в каждый момент времени величину измеряемого ускорения. Для удобства пользователя выходной сигнал резонансных усилителей выведен на гнезда 25 колодки 24. На схеме контрольные точки обозначены индексом КТ.
Функциональный блок направления ускорения 32 содержит канальные элементы - интегратор 37 с электронным ключом 38, формирователь импульсов 39, выходной конъюнктор 40 и межканальные элементы - источник опорного напряжения 41, дизъюнктор направления 42 и генератор тактовой частоты 43.
Интеграторы построены по электрической принципиальной схеме фиг.5 на основе интегрирующей цепи R1-С1. Первым входом интегратора является выход частотного детектора 35, вторым - выход генератора 43 тактовой частоты, а третьим - выход дизъюнктора фиксации направления функционального блока фиксации результата.
В момент времени t1 (фиг.4) появляется импульс тактового генератора 43 и начинается процесс заряда конденсатора С1 по закону:

где τ=R1C1.
Асимптотами функций заряда являются напряжения на выходах частотных детекторов 35. Индексация напряжений сохранена по фиг.6.
Формирователь 39 в момент времени t2, когда напряжения (21) совпадают с опорным напряжением U0 источника 41, вырабатывает короткий прямоугольный импульс, заканчивающийся в момент времени t3. По времени импульс U39 появится первым для i-го канала, соответственно появится импульс на выходе i-го выходного конъюнктора 40. Срезом U39 импульса формирователя отсекается длительность импульса генератора тактовой частоты 43. Схемотехнически генератор представляет собой комбинацию генератора постоянной частоты и триггера.
Работа блока направления 32 заканчивается импульсом дизъюнктора фиксации функционального блока 33, поступающего на вход интегратора. Очередной цикл работы начинается в момент времени t4 с приходом следующего импульса тактового генератора 43.
Функциональный блок фиксации результата 33 содержит канальные элементы - RS-триггер 44, конъюнктор модуля 45 и межканальные элементы - дизъюнктор фиксации направления 46, дизъюнктор фиксации модуля 47, преобразователь амплитуда-код 48, индикатор результата с цифровым полем 27 и кольцевым полем со светодиодами 28.
Импульс с выхода выходного конъюнктора 40 функционального блока направления 32 поступает на установочный вход RS-триггера 44 и переводит его в единичное состояние, что приводит к высвечиванию светодиода 28 направления и открытию конъюнктора модуля 45, через который текущее значение измеряемого ускорения в форме напряжения с выхода частотного детектора 35 функционального блока модуля 31 через дизъюнктор фиксации модуля 47 поступает на вход преобразователя амплитуда-код 48.
Преобразователь 48 формирует десятичный код, который отражается на индикаторе результата 27. Индицируемая информация удерживается в интервале времени t2-t4 и обновляется с частотой генератора тактовой частоты 43. Сброс RS-триггеров осуществляется по динамическому входу фронтом импульса генератора тактовой частоты.
Работает устройство для измерения горизонтальных ускорений следующим образом. Устанавливают устройство на объекте исследования, выдерживая горизонтальное положение основания 3. Имеется дополнительная возможность проверки этого положения, а именно: проверка исходных частот (13) по контрольным точкам 25 на колодке 24 - они должны быть одинаковы.
Обычным образом при первичном включении электропитания фронтом триггеры 44 устанавливаются в исходное состояние. При появлении горизонтального ускорения смещается груз 10, что приводит к изменению емкостей преобразователя 36. Наибольшее изменение (17) произойдет в направлении действия ускорения xi (по фиг.6). На выходе частотного детектора 35 на этом канале будет максимальное напряжение U35i - см. фиг.4. В момент времени t1 появляется импульс генератора тактовой частоты U43, который открывает конъюнктор интегратора 37 и начинается процесс заряда конденсатора С1 (21). Выходные напряжения интегратора поступают на формирователь 39, где в момент времени t2 совпадения напряжения U37 с опорным U0 вырабатывается прямоугольный импульс U39 длительностью t1-t2. Срезом этого импульса U39 отсекается длительность импульса генератора тактовой частоты 43. За время действия импульса генератора 43 конъюнктор 40 пропускает на выход i-ый импульс формирователя 39.
Импульс конъюнктора 40 по установочному входу переводит RS-триггер 44 в единичное состояние, что приводит к высвечиванию индикаторного светодиода 28 i-го канала и открыванию конъюнктора 45, последний передает значение измеряемого ускорения в виде напряжения частотного детектора через дизъюнктор 47 и преобразователь амплитуда-код 48 на цифровой индикатор результата 27. Информация на индикаторе обновляется с частотой генератора тактовых импульсов.
Таким образом, предлагаемое устройство для измерения горизонтальных ускорений имеет широкий диапазон измерения, в частности по нижней границе. Положенные в основу технические решения минимизируют влияние резонансных эффектов на характеристику преобразования, что способствует повышению точности измерения. Конструкция устройства проста и высокотехнологична за счет исполнения в виде отдельных сборочных единиц. Электронный блок выполнен на типовых элементах электроники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для определения коэффициента трения | 2016 |
|
RU2659179C1 |
| Способ и установка для определения вариативности передаточного отношения редуктора | 2016 |
|
RU2658138C1 |
| Способ определения момента трения в подшипниках качения | 2017 |
|
RU2659101C1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПЕРИОДИЧЕСКИХ ИМПУЛЬСНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ И ОЦЕНКИ ИХ ПЕРИОДА | 1990 |
|
RU2033617C1 |
| Устройство для психологических исследований | 1989 |
|
SU1621883A1 |
| Устройство для управления регулируемым мостовым инвертором | 1988 |
|
SU1548830A1 |
| Устройство для автоматической настройки рабочих органов рыборазделочной машины | 1975 |
|
SU659125A1 |
| Устройство для психологических исследований | 1989 |
|
SU1644908A1 |
| Вибрационный преобразователь расхода | 1990 |
|
SU1795291A1 |
Изобретение относится к измерительной технике. Устройство для измерения горизонтальных ускорений содержит общее основание, на котором смонтированы датчик с чувствительным элементом, составленным грузом цилиндрической формы из магнитопроводного материала и упругим шарниром, с преобразователем перемещения, и электронный блок, электрически связанный с датчиком, при этом оно снабжено демпфером колебаний груза, а упругий шарнир выполнен в виде подвеса цилиндрического сечения, преобразователь перемещения выполнен в виде набора одинаковых электропроводных электроизолированных пластин, каждая из которых образует с грузом электрическую емкость, при этом в исходном положении электропроводные пластины расположены с постоянным шагом по образующей цилиндрической коаксиальной грузу поверхности. Технический результат – расширение диапазона измерения. 5 з.п. ф-лы, 6 ил.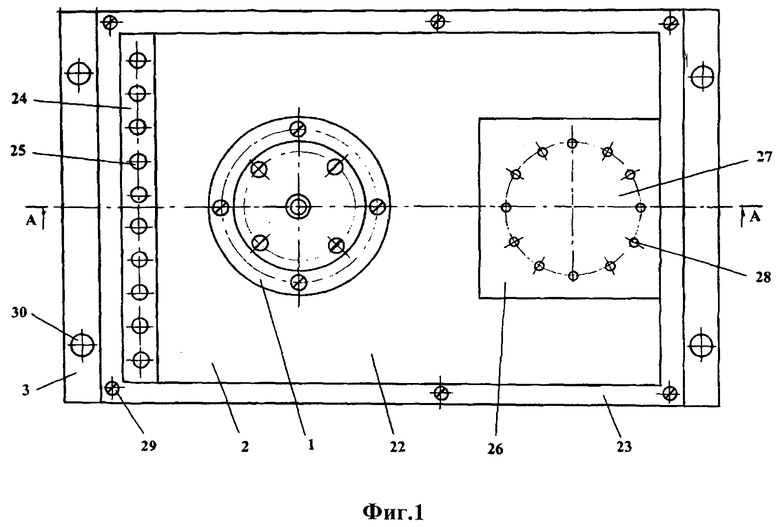
1. Устройство для измерения горизонтальных ускорений, содержащее общее основание, на котором смонтированы датчик с чувствительным элементом, составленным грузом цилиндрической формы из магнитопроводного материала и упругим шарниром, с преобразователем перемещения, и электронный блок, электрически связанный с датчиком, отличающееся тем, что оно снабжено демпфером колебаний груза, а упругий шарнир выполнен в виде подвеса цилиндрического сечения, преобразователь перемещения выполнен в виде набора одинаковых электропроводных электроизолированных пластин, каждая из которых образует с грузом электрическую емкость, при этом в исходном положении электропроводные пластины расположены с постоянным шагом по образующей цилиндрической коаксиальной грузу поверхности.
2. Устройство для измерения горизонтальных ускорений по п. 1, отличающееся тем, что демпфер колебаний груза выполнен в виде постоянного магнита плоской круговой формы с осевой намагниченностью, который установлен с возможностью магнитного взаимодействия неподвижно под данной частью груза с регулируемым зазором.
3. Устройство для измерения горизонтальных ускорений по п. 1, отличающееся тем, что электронный блок выполнен многоканальным, с количеством каналов, равным количеству электропроводных пластин преобразователя перемещения, в составе трех функциональных блоков - функционального блока модуля ускорения, функционального блока направления ускорения и функционального блока фиксации результата.
4. Устройство для измерения горизонтальных ускорений по п. 3, отличающееся тем, что функциональный блок модуля ускорения содержит в каждом канале последовательно соединенные резонансный усилитель и частотный детектор, при этом входы резонансного усилителя соединены с обкладками электрической емкости преобразователя перемещения, а выход частотного детектора является выходом функционального блока модуля ускорения.
5. Устройство для измерения горизонтальных ускорений по п. 3, отличающееся тем, что функциональный блок направления ускорения содержит в каждом канале интегратор, формирователь импульсов, выходной конъюнктор и межканальные элементы - источник опорного напряжения, дизъюнктор направления и генератор тактовой частоты, при этом первый вход интегратора соединен с выходом функционального блока модуля ускорения, его второй вход с выходом генератора опорной частоты, а третий - с выходом дизъюнктора фиксации направления функционального блока фиксации результата, выход интегратора соединен с первым входом формирователя импульсов, второй вход которого связан с динамическим входом генератора тактовой частоты, выход последнего является первым входом выходного конъюктора, его второй вход связан с выходом формирователя импульсов, а выход является выходом функционального блока направления ускорения.
6. Устройство для измерения горизонтальных ускорений по п. 3, отличающееся тем, что функциональный блок фиксации результата содержит в каждом канале RS-триггер, конъюктор модуля, светодиод индикатора направления и межканальные элементы - дизъюнктор фиксации направления, дизъюнктор фиксации модуля, преобразователь амплитуда-код и индикатор результата, при этом динамический вход сброса RS-триггера связан с выходом генератора тактовой частоты, установочный вход - с выходом функционального блока направления ускорения, а его выход - со светодиодом индикатора направления, канальным выходом дизъюнктора фиксации направления и первым входом конъюнктора модуля, второй вход последнего связан с выходом частотного детектора функционального блока модуля ускорения, выход конъюнктора модуля соединен с канальным входом дизъюнктора фиксации модуля, выход последнего через преобразователь амплитуда-код соединен с индикатором результата.
| Способ защиты сварочной горелки от брызг расплавленного металла | 1961 |
|
SU147269A1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ОПТИМАЛЬНОЙ ПРОТЕКАЕМОСТИ АСБЕСТОВОЙ ДИАФРАГМЫ ХЛОРНЫХ | 0 |
|
SU172727A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2249221C1 |
| CN 102650649 A, 29.08.2012. | |||

