Изобретение относится к области аналоговой вычислительной техники.
Известно устройство для моделирования систем регулирования газотурбинных двигателей, содержащее электропривод постоянного тока с датчиком тока якоря генератора и тахогенератором, усилитель мощности, интегратор, нелинейный блок, блок формирования регулирующего воздействия но «отклонению, суммирующий блок, блок компенсации инерционности обмотки возбуждения генератора.
Известные устройства имеют значительную динамическую погрешность.
Предложенное устройство отличается тем, что, с целью уменьшения динамической погрешности устройства, в нем выход интегратора соединен со входом нелинейного блока и входом блока формирования регулирующего воздействия по «отклонению, второй вход которого подключен к тахогенератору, а выходы нелинейного блока, блока формирования регулирующего воздействия по «отклонению, а также цепь входного сигнала интегратора и выход датчика тока якоря генератора подключены ко входам суммнрующего блока.
ную модель газотурбинного двигателя, интегратор 2 и систему управления электроприводом, куда входят: блок 5 формирования регулирующего воздействия по «отклонению,
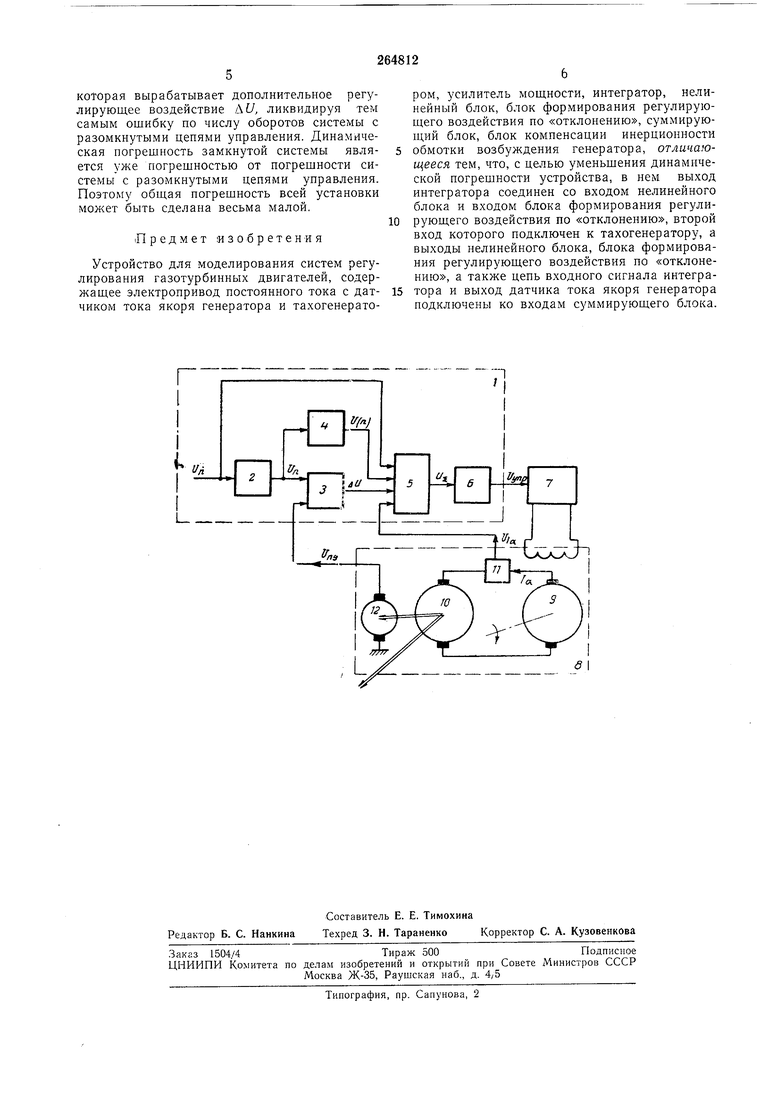
нелинейный блок 4, суммирующий блок 5 и блок компенсации 6 инерционности обмотки возбуждения генератора усилителя мощности 7 электропривода постоянного тока 8, содержащего генератор 9, двигатель 10, датчик тока 11 якорной цепи, тахогенератор 12.
Сигнал управления /7„, пропорциональный числу оборотов ротора моделируемого газотурбинного двигателя, с выхода интегрирующего блока (интегратора) 2 поступает на
вход блока 3 формирования регулирующего воздействия по «отклонению. На второй вход этого же блока с выхода тахогенератора /2 поступает сигнал отрицательной обратной связи и„д, пропорциональный числу оборотов
пз вала электропривода. Сигнал At/ с выхода блока 3, равный в общем случае:
Ш К, (и„ - и„,) + к, (U, - UJ dt +
d(Un-Uns)
+ 3
25 dt
Разомкнутая цепь управления, предназначенная для быстрого и полного воспроизведения управляющего сигнала И „ представляет собой цепь сигнала U , полученного на входе интегрирующего блока 2 электронной модели и пропорционального угловому ускорению ротора моделируемого газотурбинного двигателя.
Вторая цепь управления по разомкнутому циклу включает в себя нелинейный блок 4, вырабатывающий сигнал U(п) для компенсации момента сопротивления нагрузки при изменении числа оборотов привода. Если момент сопротивления нагрузки является функцией не только числа оборотов, но и других параметров, необходимо корректировать выход нелинейного блока по этим параметрам, т, е. применить нелинейный блок от нескольких переменных.
Сигналы AU, и„, с/(„) поступают каждый
на свой вход суммирующего блока 5. На вход этого же блока с выхода датчика тока // якорной цепи поступает также сигнал глубокой отрицательной обратной связи по току якоря иj генератора 9. Выходной сигнал и суммирующего блока подается на вход блока компенсации 6 инерционности обмотки возбуждения генератора, а с его выхода - на вход усилителя мощности 7, питающего обмотку возбуждения генератора 9. Благодаря глубокой отрицательной обратной связи по току якоря генератора ток в якорной цепи электропривода мало зависит от скорости вращения электропривода и его величина поддерживается равной значению:
1,/,Ш + К,и„ + К,и(п),
где /С4, 5, Кв - коэффициенты усиления внутреннего замкнутого контура регулирования тока по соответствующим входам.
Блок компенсации 6 инерционности обмотки возбуждения генератора для улучшения динамики контура регулирования тока якорной цепи. Выходной сигнал этого блока t/ynp связан со входным U соотношением:
Uynp - 7 (. + т,, ) ,
где ГБГ-постоянная времени обмотки возбуждения генератора; Кл - коэффициент усиления.
В результате внутренний контур регулирования тока можно сделать практически безынерционным.
Регулирование скорости вращения электропривода осуществляется путем изменения величины тока / в его якорной цепи.
Уравнение движения вала двигателя электропривода:
(0,97/С,Ф) /, - М, (пэ), (1)
где у - суммарный момент инерции привода и нагрузки, приведенный к оси вращения; «3 -число оборотов привода; (0,97К Ф) - коэффициент, характеризующий магнитный поток двигателя; М (пэ)-момент сопрозависящий от
тивления на валу двигателя, числа оборотов. Учитывая, что
+ Ae(«),
(2) подстановки (2) и (1) имеем:
(7КеФ)К.и,+ + (0,97/;Г,Ф) К,и (п) - М, (пэ).
(3)
Пусть
(0,97/С,Ф) К,и„ - М, (пэ) 0.
(4)
Чтобы выполнить условие (4) требуется соответствующим образом подобрать нелинейную функцию U(n). Для этого необходимо предварительно разомкнуть систему по входам и и , снять зависимость установившегося :значения числа оборотов привода f/пэ от величины сигнала по входу t/(«). В нелинейный блок 4 закладывается характеристика, обратная снятой. В этом случае сигнал и (п) на выходе блока 4 представляет собой управляющее воздействие, компенсирующее момент сопротивления нагрузки по числу оборотов в установившемся режиме. С учетом (4) уравнение (3) можно представить в виде:
. (й,)1КеЩК ,
(5)
dt
30
„, „(0,9Ж.Ф) m.rf(0.97.).L, (6) J yJL Кп
°30
где Кп - передаточный коэффициент интегрирующего блока электронной модели газотурбинного двигателя.
Таким образом, из выражений (5) и (6) очевидно, что система с разомкнутыми цепями управления обеспечивает пропорциональность углового ускорения и числа оборотов вала привода угловому ускорению и числу оборотов ротора моделируемого газотурбинного двигателя.
В действительности соотношения (5) и (6) выполняются с некоторым приблил ением, так как не учитывается реакция якоря двигателя на переходных режимах и условие (4) выполняется приближенно. которая вырабатывает дополнительное регулирующее воздействие , ликвидируя тем самым ошибку по числу оборотов системы с разомкнутыми цепями управления. Динамическая погрешность замкнутой системы является уже погрешностью от погрешности системы с разомкнутыми цепями управлепия. Поэтому обшая погрешность всей установки может быть сделана весьма малой. Предмет изобретения Устройство для моделирования систем регулирования газотурбинных двигателей, содержащее электропривод постоянного тока с датчиком тока якоря генератора и тахогенератором, усилитель мощности, интегратор, нелинейный блок, блок формирования регулирующего воздействия по «отклонению, суммирующий блок, блок компенсации инерционности обмотки возбуждения генератора, отличающееся тем, что, с целью уменьшения динамической погрешности устройства, в нем выход интегратора соединен со входом нелинейного блока и входом блока формирования регулирующего воздействия по «отклонению, второй вход которого подключен к тахогенерагору, а выходы нелинейного блока, блока формирования регулирующего воздействия по «отклонению, а также цепь входного сигнала интегратора и выход датчика тока якоря генератора подключены ко входам суммирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости электродвигателя постоянного тока | 1979 |
|
SU921011A1 |
| Электропривод постоянного тока | 1990 |
|
SU1835122A3 |
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Электропривод постоянного тока | 1980 |
|
SU924814A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
| Способ защиты обмотки якоря электродвигателя постоянного тока от перегрева | 1986 |
|
SU1573499A1 |
| Электропривод постоянного тока | 1989 |
|
SU1656653A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
..
J
1Г:ГU-Tr:L
Л
91
