Изобретение относится к электротехнике, в частности к электроприводам постоянного тока, выполненным по системе генератор -двигатель.
Известно устройство для стабилизации скорости электродвигателя . постоянного тока в системе генера тор - двигатель с нелинейными обратными связями по скорости, возмуще-) ниям и их производным {.
Недостатком устройства является малый диапазон регулирования.
Наиболее близким к изобретению по технической сущности является устройство для стабилизации скорости электродвигателя постоянног тока в системе генератор - двигатель, содержащее сумматор, входа которого подключены к резистор включенному последовательно в цепь якорей генератора и двигателя, и выходу источника задающего напряже-, ния, и тахогенератор, установленный на валу электродвигателя 2.
Э,то устройство при более широком диапазоне регулирования скорости обеспечивает недостаточную точность стабилизации скорости электродвигателя при изменениях возмущакядих воздействий.
Цель изобретения - повышение точности стабилизации скорости электродвигателя.
Цель достигается за счет того,
5 что в устройство дополнительно введены второй тахогенератор, установленный на валу генератора, блок умножения, включенный между выходом второго тахогенёратора и входом
10 сумматора, последовательная цепь из интегратора и нелинейного функционального преобразователя, включенная между выходом сумматора и вторым входом блока умножения, пос15ледовательная цепь из второго сумматора и усилите-Л51, включенная между выходом Интегратора и обмоткой возбуждения генератора, и третий сумматор, входы которого соединены с.
20 выходами источника задающего напряжения и первого тахогенёратора, а выход - со вторым входом второго сумматора.
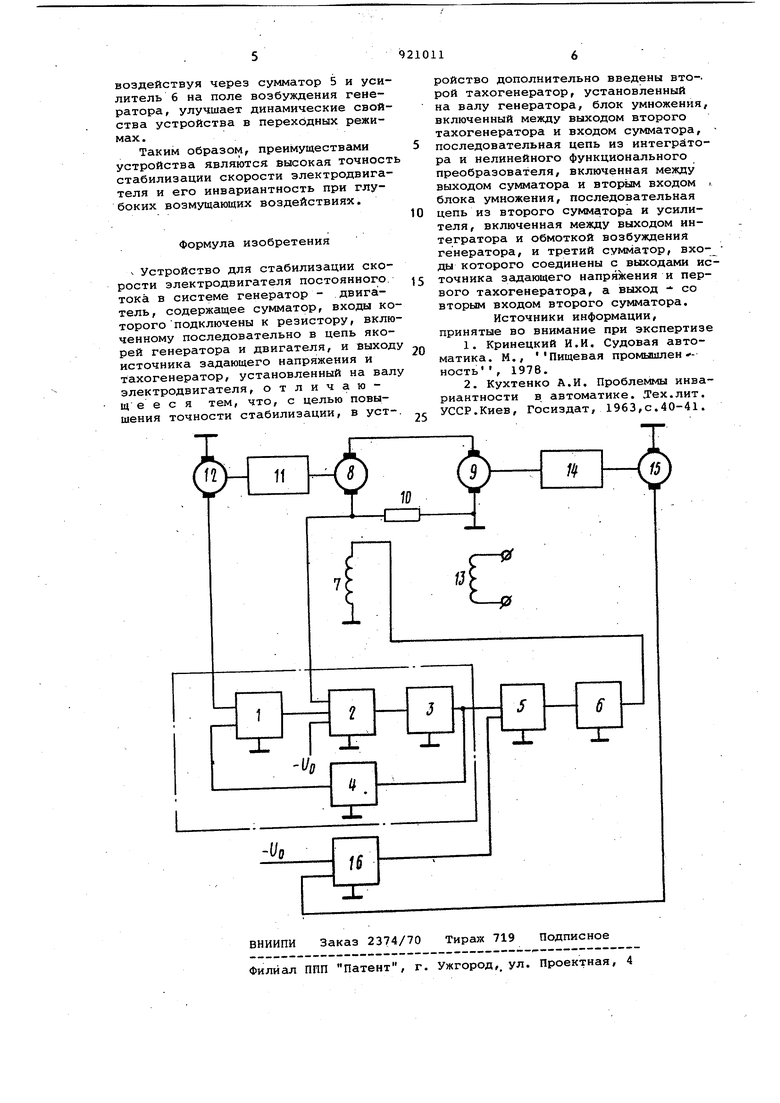
На чертеже приведена структурная
25 схема устройства.
Устройство содержит последовательно соединенную , замкнутую цепь из блока 1. умножения, сумматора 2, интегратора 3 и нелинейного функцио30нального преобразователя 4. Выход интегратора 3 соединен через после довательно соединенную цепь из вто рого сумматора 5 и усилителя 6 с обмоткой 7 возбуждения генератора, якорь 8 которого соединен последовательно с якорем 9 двигателя и резистором 10, соединенным с первы входом сумматора 2. Генератор 8 пр водится в действие первичным двига телем 11 и снабжен тахогенератором 12, подключенным к первому входу блока 1 умножения. Якорь 9 электро двигателя с независимым возбуждени от обмотки 13 через нагрузку 14 св зай с тахогенератором 15, подключе ным ко второму входу третьего сумматора 16, выход которого соединен со вторым входом сумматора 5. Тре тий вход сумматора 2 и первый вход сумматора 16 соединены с источни -ком задающего напряжения Uo (не показан). Устройство для стабилизации ско рости электродвигателя постоянного тока в .системе генератор - двигатель работает следующим образом. Скорость двигателя постоянного тока в установившемся режиме опреде ляется формулой .-. Rq/ С -Ф где Up. - напряжение генератора, при ложенное к якорным зажимам двигателя ток нагрузки двигателя пос тоянного тока; сопротивление якорной цепи двигателя; постоянная двигателя; магнитный поток обмотки возбуждения двигателя. .Поскольку в рассматриваемом случае С и Фо являются постоянными,то введя обозначение .- . Г К ,, формула (1) переписывается в следующем виде: . KV Up - КгЗ- Ra. (2) Напряжение на зажимах генератора определяется формулой Ur- ЕГ - Rr3 , (3) .где Е - напряжение холостого хода генератора; RJ. - сопротивление якорной цеп генератора. Напряжение холостого хода генератора равно Е г Ср Срр Пг,(4 где Cf - постоянная генератора; п - скорость генератора; фр - магнитный поток обмотки возбуждения генератора. Отношение .ЕГ--СГ-ФГ-. 5) с точностью до постоянного множителя Сг представляет собой магнитную характеристику генератора, которая в зависимости от напряжения возбуждения и имеет нелинейный характер, т.е. Ср.ф f (и§) . (6) Формулу (2) с учетом изложенного ;можно переписать в следующем виде: п К,-f (U6) KI (Rf, + Н,)-Э (7) Для постоянства скорости двигателя постоянного тока необходимо соблюдать следующее условие: nq nj((8) где ( заданная скорость дви гателя. Формулу (8) с учетом формулы (7) можно записать в таком виде: Kvf (U5) Пг- К (Rp + R)-a - (9) Последнее выражение описывает поведение предлагаемого устройства стабилизации частоты вращения двигателя постоянного тока в установившемся режиме. В динамическом режиме устройство стабилизации описывается следующим дифференциальным уравнением: и ,f (ил- Пг- К (R-+ R,) , ((0) где К - коэффициент усиления интегратора 3. Коэффициент К выбирается намного большим величины l/Tf, где Тр постоянная времени генератора постоянного тока. С выхода интегратора 3 снимается ., необходимое напряжение возбуждения генератора Uj, с последующей подачей на сумматор 5. Первое слагаемое формулы (9) реализуется блоком 1 умножения, на входы которого поступают сигналы о скорости генератора с тахогенератора 12 и К f (Иб ) г формируемый нелинейным функциональным преобразователем 4. На сумматоре 2 реализуется вычитание сигнала К (R. + )-J / образующегося на резисторе 10, и задающего сигнала UQ, пропорционального заданной скорости поо двигателя. Полученный сигнал ошибки интегрируется интегратором -3 до тех пор, пока он не обратится в нуль, из-за воздействия интегратора 3 через сумматор 5 и усилитель 6 на поле возбуждения генератора, создаваемое обмоткой 7. При этом устанавливается и нулевой сигнал на выходе . сумматора 16. При отклонении скорости электродвигателя от заданного значения в переходных режимах соответствующий сигнал отклонения появляется на выходе сумматора 16 до тех пор, лока система регулирования не придет в новое состояние равновесия. Этот сигнал, являющийся сигналом пропорциональной обратной связи по скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты обмотки якоря электродвигателя постоянного тока от перегрева | 1986 |
|
SU1573499A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| Электропривод постоянного тока | 1980 |
|
SU924814A1 |
| Двухъякорный электропривод постоянного тока | 1990 |
|
SU1767678A1 |
| Способ стабилизации тока якоря электродвигателя постоянного тока | 1984 |
|
SU1270854A1 |
| Датчик статической и динамической составляющих тока электродвигателя постоянного тока | 1981 |
|
SU945813A1 |
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Электропривод постоянного тока | 1985 |
|
SU1339851A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
