Данное изобретение относится к системам автоматического регулирования (САР), в частности к способу компенсации запаздывания, которое влияет на динамические свойства и УСТОЙЧИВОСТЬ САР.
Известен способ компенсации запаздывания с помощью упреждающего сигнала отрицательной обратной СВЯЗИ.
Предлагаемый способ отличается тем, что снимают сигналы с рабочих обмоток магнитного усилителя, суммируют их и результат через фильтр-модель объекта регулирования подают на вход системы регулирования. Это позволяет упростить систему автоматического регулирования с быстродействующим магнитным усилителем.
Предложенный способ пояснен чертежами.
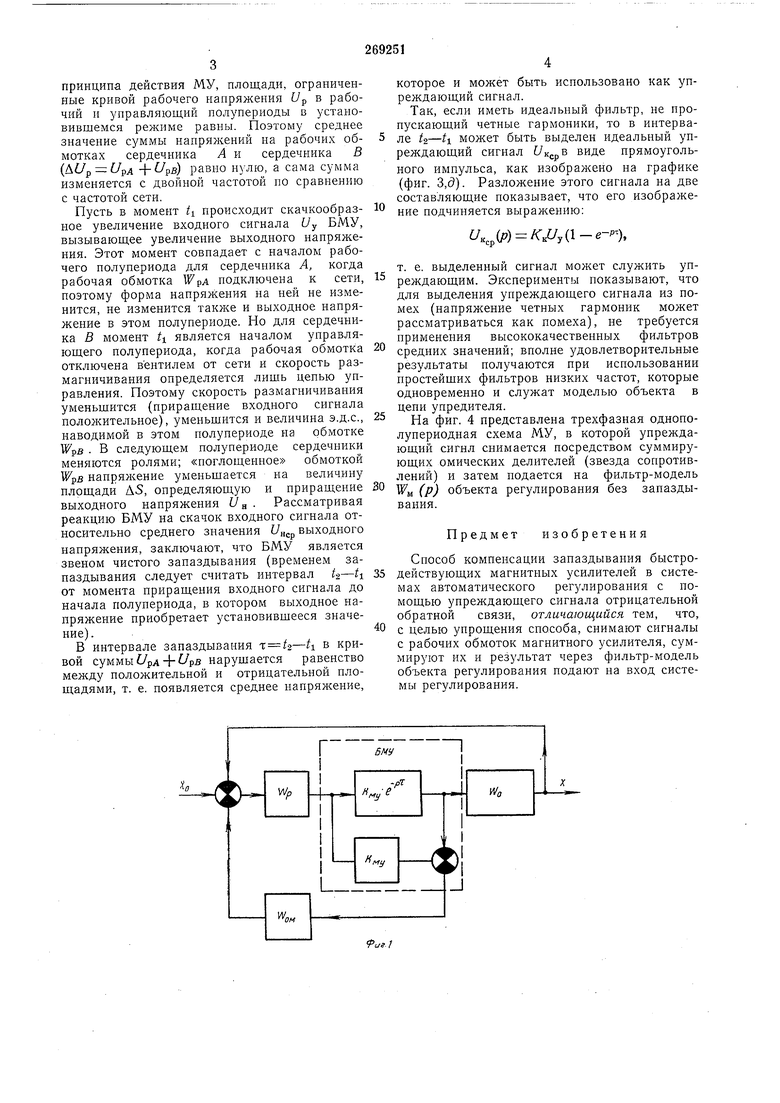
Па фиг. 1 представлена структурная схема САР с быстродействующим магнитным усилителем (БМУ) и компенсацией заиаздывания по известному способу, где:
WP-передаточная функция регулятора; Wl -передаточиая функция объекта регулирования;
-передаточная функция модели объекта; -передаточная функция БМУ.
на рабочих обмотках; на фиг. 4 - трехфазная одиополупериодная схема МУ.
Как. известно, по своим дппампческим показателям быстродействующие магнитные усилители (БМУ) экБивалептиы звену чистого запаздыванпя, пмеюи1,его передаточную функцию:
ту/ f iibix (р) 1 „рvv ЕМУ - ---;--- - А МУ е .
(р)
Поэтому и системы автоматического регулирования (САР), содержащие БМУ, могут быть классифицироваиы как системы с запаздыванием.
В системах с относительно большим коэффициентом усиления, т. е. в системах высокой точности, запаздывание БМУ принципиально ограничивает возмол ностп системы в смысле динамических показателей.
ПрИ1щип получения упре кде1шого сигнала В БЛ1У, составляющий существо предлагаемого изобретеиия, может быть пояснеп следующим образом. Рассмотрим в качестве примера работу одпофазиого двуиолупериодного БМУ (фиг. 2), предполагая для простоты, что В управляющий полупериод на рабочих обмотках усплптеля наводптся синусоидальная э.д.с.
принципа действия МУ, площади, ограиичеиные кривой рабочего напряжения f/p в рабочий и управляющий полупериоды в установившемся режиме равны. Поэтому среднее значение суммы напряжений на рабочих обмотках сердечника А и сердечника В ( f/pA ) равно нулю, а сама сумма изменяется с двойной частотой но сравнению с частотой сети.
Пусть в момент /i происходит скачкообразное увеличение входного сигнала Uy БМУ, вызывающее увеличение выходного нанряжения. Этот момент совпадает с началом рабочего полупериода для сердечпика А, когда рабочая обмотка подключена к сети, поэтому форма напряжения на пей не изменится, не изменится так}ке и выходное напряжение в этом полупериоде. Но для сердечника В момент ti является началом управляющего полупернода, когда рабочая обмотка отключена вентилем от сети и скорость размагничивания определяется лишь цепью управления. Поэтому скорость размагничивания уменьшится (приращение входного сигнала положительное), уменьшится и величина э.д.с., наводимой в этом полунериоде на обмотке WfB В следующем полупериоде сердечники меняются ролями; «поглощенное обмоткой WyB нанряжение уменьшается на величину площади AS, определяющую и приращение выходного напряжения 11 я Рассматривая реакцию БМУ на скачок входного сигнала относительно среднего значения выходного напряжения, заключают, что БМУ является звеном чистого запаздывания (временем запаздывания следует считать интервал t-2-tот момента приращения входного сигнала до начала полупериода, в котором выходное нанряжение приобретает установившееся значение).
В интервале запаздывания в кривой суммы f/pA + p5 нарушается равенство между положительной и отрицательной площадями, т. е. появляется среднее напрял ение,
которое и может быть использовано как упреждающий сигнал.
Так, если иметь идеальный фильтр, не пропускающий четные гармоники, то в ннтерва5 ле может быть выделен идеальный упреждающий сигнал f/KcpB виде прямоугольного импульса, как изображено на графике (фиг. 3,5). Разложение этого сигнала на две составляющие ноказывает, что его нзображе ние подчиняется выражению:
U,(p) KJJy(l-e-P),
т. е. выделенный сигнал может служить уп реждающим. Эксперименты показывают, что для выделения унреждающего сигнала из помех (напряжение четных гармоник может рассматриваться как помеха), не требуется нрименения высококачественных фильтров средних значений; вполне удовлетворительные результаты получаются при использовании простейших фильтров низких частот, которые одновременно и служат моделью объекта в цепи упредителя.
На фиг. 4 представлена трехфазная однополупериодная схема МУ, в которой упреждающий сигнл снимается посредством суммирующих омических делителей (звезда сопротивлений) и затем подается на фильтр-модель м (р) объекта регулирования без запаздывания.
Предмет изобретения
Способ компенсации запаздывания быстро5 действующих магнитных усилителей в системах автоматического регулирования с помощью упреждающего сигнала отрнцательной обратной связи, отличающийся тем, что, 0 с целью упрощения способа, снимают сигналы с рабочих обмоток магнитного усилителя, суммируют их и результат через фильтр-модель объекта регулирования подают на вход системы регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования температуры пара | 1983 |
|
SU1129459A1 |
| СПОСОБ КОМПЕНСАЦИИ ЗАПАЗДЫВАНИЯ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU263016A1 |
| Магнитное логическое устройство | 1961 |
|
SU149259A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРАМИ | 1971 |
|
SU315257A1 |
| Магнитное логическое устройство | 1961 |
|
SU149258A1 |
| СПОСОБ ЦИФРОВОЙ КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНОЙ ДЕВИАЦИИ ДЛЯ МАГНИТНОГО ЭЛЕКТРОННОГО КОМПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210060C2 |
| Преобразователь постоянного напряжения в переменное | 1982 |
|
SU1075358A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |


и.
WpvlU
«Ht
(WOM
jn ecfufTj e/Jb
VV
I
-0 -0
