Известен способ компенсации запаздывания в системах автоматического регулирирования с помощью упреждающего сигнала отрицательной обратной связи на входе системы.
На фиг. 1 представлена структурная схема системы автоматического регулирования (САР) объекта с запаздыванием и с компенсацией запаздывания по известному способу. Она содерлсит передаточную функцию регулятора Wp, передаточную функцию объекта регулирования с запаздыванием to, передаточную функцию WM модели объекта (необходимо: WM Wo), запаздывание т упредителя, моделирующее запаздывание объекта, входной и выходной сигналы ХоХ замкнутой САР, сигнал У на входе звена с запаздыванием, корректирующий сигнал Уо упредителя
У(р) У1(р)(1-г )
При этом передаточная функция замкнутой системы имеет вид:
-рт„
Wp W, . е
W,(p)
Wp-W(e -e )
Если to « т„, то характеристическое уравнение САР не содержит члена . Следовательно, влияние запаздывания на устойчивость системы скомпенсировано. Однако этот способ компенсации запаздывания имеет недостатки;
а)требуется выполнение дополнительного звена чистого запаздывания, что само по себе представляет определенные технические трудности и стоимость его, например, для систем электроавтоматики, оказывается соизмеримой со стоимостью самой САР;
б)как правило, запаздывание в объектах регулирования является переменной величиной (сложной функцией режима работы САР), что по условиям сохранения заданных динамических свойств и запасов устойчивости требует соответствующей подстройки блока запаздывания упредителя, а это дополнительно резко усложняет и удорожает последний.
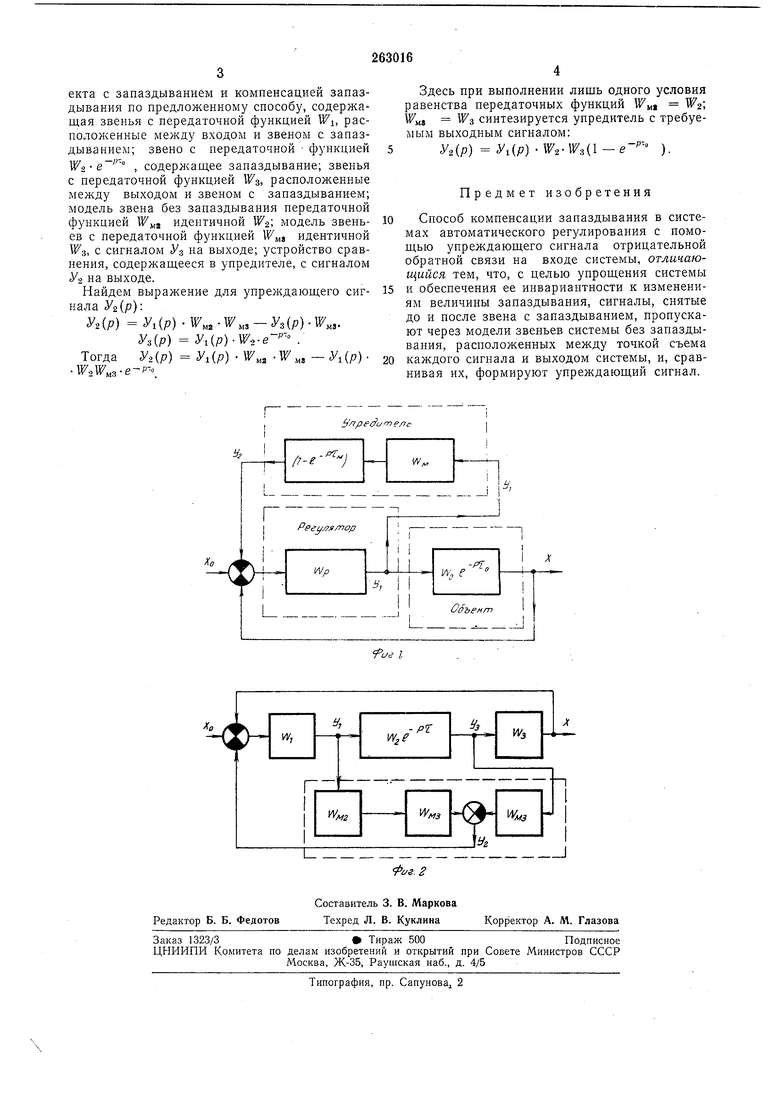
Предложенный способ компенсации запаздывания отличается от известного тем, что сигналы, снятые до и после звена с запаздыванием, пропускают через модели звеньев системы без запаздывания, расположенных между точкой съема каждого сигнала и выходом системы, и, сравнивая их, формируют упреждающий сигнал.
Применение этого способа упрощает систему, так как не требуется дополнительного звена чистого запаздывания, а используется запаздывание самой системы. При этом обеспечивается инвариантность системы к изменениям величины запаздывания.
екта с запаздыванием и компенсацией запаздывания по предложенному способу, содержащая звенья с передаточной функцией Wi, расположенные между входом и звеном с запаздыванием; звено с передаточной функцией
, содержащее запаздывание; звенья с передаточной функцией Wg, расположенные между выходом и звеном с запаздыванием; модель звена без запаздывания передаточной функцией WMJ идентичной Wo; модель звеньев с передаточной функцией идентичной Ws, с сигналом УЗ на выходе; устройство сравнения, содержащееся в упредителе, с сигналом УЗ на выходе.
Найдем выражение для упреждающего сигнала У2(р):
У,(р) У(р) W.-W,„ - УЗ(р) Г„,.
УЗ(Р) y,(p).W.2-e-- . Тогда У,(р) y,(p)-W,.W,
У(Р) .W.r«3.e-P
Здесь при выполнении лишь одного условия равенства передаточных функций м 2, м 3 синтезируется упредитель с требуемым выходным сигналом:
Уо(р) У,(р) .W.,-W,(-e- ).
Предмет изобретения
Способ компенсации запаздывания в системах автоматического регулирования с помощью упрел дающего сигнала отрицательной обратной связи на входе системы, отличающийся тем, что, с целью упрощения системы
и обеспечения ее инвариантности к изменениям величины запаздывания, сигналы, снятые до и после звена с запаздыванием, пропускают через модели звеньев системы без запаздывания, расположенных между точкой съема
каждого сигнала и выходом системы, и, сравнивая их, формируют упрел дающий сигнал.
еле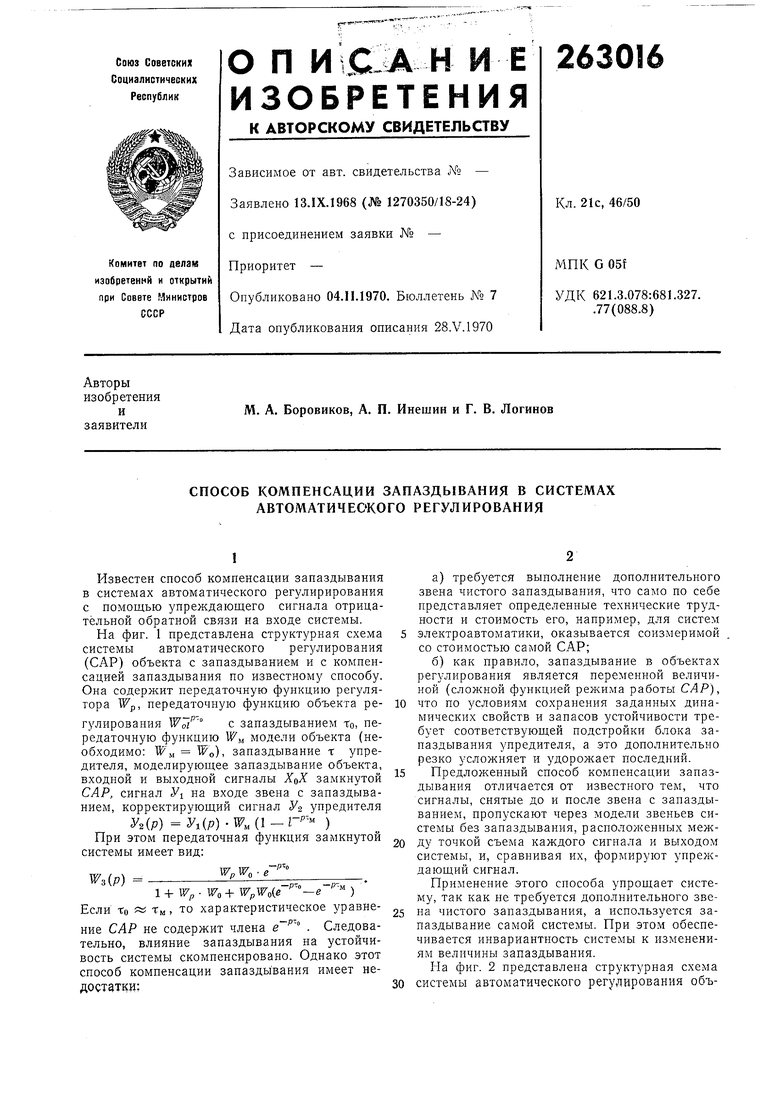
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ЗАПАЗДЫВАНИЯ БЫСТРОДЕЙСТВУЮЩИХ МАГНИТНЫХ УСИЛИТЕЛЕЙ В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1970 |
|
SU269251A1 |
| Система управления для объектов с запаздыванием | 1984 |
|
SU1239686A1 |
| Устройство для компенсации запаздывания | 1985 |
|
SU1325403A1 |
| Устройство для компенсации запаздывания | 1982 |
|
SU1108390A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Устройство управления весовым дискретным дозированием сыпучих материалов | 1986 |
|
SU1364896A2 |
| Самонастраивающаяся система | 1984 |
|
SU1241192A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
