Изобретение относит:я к способам регулирования напряжения, подводимого к статору двигателя двойного питания, работающего от автоно.много источника питания, например в судовых установках, газотурбовозах и т. д.
Пзвестен способ управления двигателем двойного питания, обмотка статора которого подключена .к автономному регулируемому по напряжению генератору, а обмотка ротора - к управляемому в фуикции скорости и мопдпости двигателя мутатору.
Предложенный способ более совершенен, так как дает возможность уменьшить величину полной мощности мутатора.
Это обеспечивается тем, что иапряжение U на .выходе источника питания поддерживают в соответствии с уравнением № СМ/где М - момент на .валу двигателя, С - коэффициент,
хшсравный , зависит от переходной синCOS 9
хронной реактивности статора х , синхронной угловой скорости (Ю(,) и от коэффициента мощности (cos ф) двигателя.
Приведенная формула выведена из известного выражения напряжения ротора, которое определяет связь между напряжением ротора (Jf и статора U. Это выражение после некоторых элементарных преобразований и упрощений имеет вид
.
Uf
+ K-ST,
у +
напряжение цепи статора; напряжение ,на кольцах ротора;
переходная синхронная реактивность; полная мощность статорной цепи
двигателя;
некоторая постоянная, не зависящая от и.
Пеобходимое изменение напряжения питания и, обеспечивающее минимальное значение напряжения роторной цепи при регулироваНИИ, можно найти, приравняв производную от
dUf
вырай ения для Uf по U, т. е.
, нулю, и
ди
выразиз отсюда напряжение питания
2lw
2U-.
ST
f/8
дЦ - ди
У
t/.+ EL + /
u
3 ,
отсюда , где W
полная мощность цепи статора, разная
. r :l/7+ |/
М2„сг MWf.
Подставляя теперь полученное выражение для полной мощности, в формулу для квадрата напряжения питания, получаем уравнение, в соответствии с которым напряжение питания при условии, что величина тока -ротора не превосходит своего номинального значения, обеспечивает минимум напряжения на кольцах ротора.
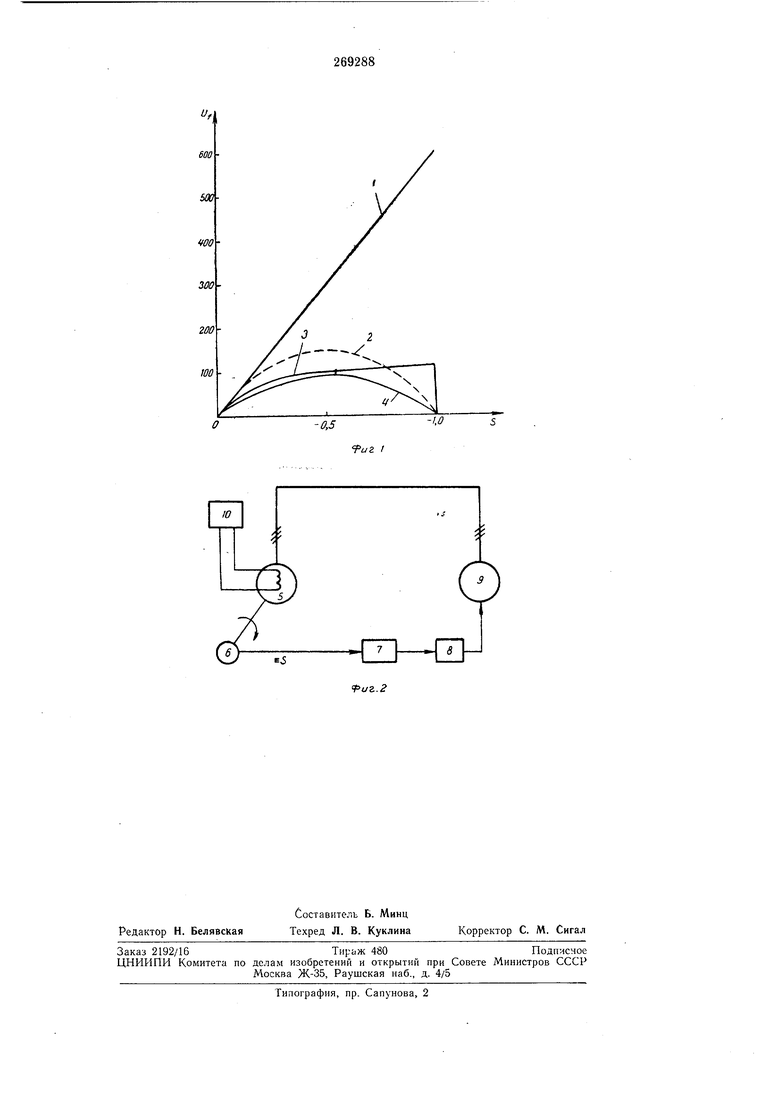
На фиг. 1 приведен график изменения папряжения роторной цепи в функции скольжения при различных зависимостях напряжения питания. Кривая 1 изображает изменение Uf в функции скольжения, когда напряжение U на .выходе источ;ника питания не регулируется; кривая 2 соответствует изменению Uf от .скольжения при регулиро.вани.и И по линеь нову закоиу от скорости вращения, что предлагается в способе-прототипе.
Кривая 3 характеризует изменение напряжения Uf щ функции скольжения, .когда напряжение и изменяется таким образом, что ток роторной цепи двигателя является минимальным. Кр.нвая 4 соответствует предлагаемому способу, при котором напряжение U изменяют в соответствии с уравнением (72 СМ, причем как видно из фиг. 1, обеспечивается минимум напряжения роторной цепи . Способ регулирования напряжения U в соответствии с ура.внением № СМ применим в тех случаях, когда значение тока ротора не превышает номинально величины, Иначе -необходимо применение регулирования U в соответствии с кривой 3, обеспечивающее минимальное значение тока ротора.
Предлагаемый способ позволяет снизить напряжение цепи ротора до минимальной (вел-ичины, следовательно, снизить .и установленную мощность преобразователя в цепи ротора.
Укаже.м, что это я.вляется возможным при любом произвольном характере изменения механического момента на валу.
Па фит. 2 пр:иведена схема реализации этого предложения, содержащая двигатель 5 двойного питания, датчик 6 сигнала, пропорционального моменту на валу двигателя, регулятор 7, схему управления 8 источликом питания, источник питания 9 двигателя двойного питания, систему регулирования 10 в роторной цепи двигателя двойного питания.
Предлагаемый способ управления двигателя двойного питания осуществляется по этой схеме следующим образом; в регулятор 7 от.датчика 6 цодается сигнал, пропорциональный моименту на валу двигателя 5. Выходная нелинейнаяхарактеристикарегулятора/pg F(M), соответствующая формуле для U дВИгателя, формируется регулятором, например с помощью блоков нелинейности.
Папряжение регулятора воздействует на схему управления 8 источником питания статорной цепи двигателя так, что обеспечивается зависимость .
Вследствие этого мощность системы регулирования to в роторной цеии асинхронизированного синхронного двигателя при любом произвольном характере изменения механического момента на валу снижается до минимального значения.
Предлагаемый способ может быть применен .всюду, где используются автономные электрические системы, содержащие асинхронизированный синхронный двигатель, например, для гребных электрических установок, газотурбовозов, электроприводов с вентиляторной зависимостью момента на валу и т. д.
Способ применим до значений тока ротора, (Не превышающих номинальное.
Предмет изобретения
Способ управления двигателем двойного питания, обмотка статора которого подключена к а.втономному регулируемому по напряжению генератору, а обмотка ротора - к управляемому в функции скорости и мощности двигателя мутатору, отличающийся тем, что, с целью уменьшения полной мощности мутатора, напряжение U на выходе источника питания поддерживают в соответствии с уравнением , где М - момент на .валу .двиXWf.
гателя, С - коэффициент, равный
заCOS -f
висящий от переходной синхронной реактивности статора (х ), синхронной угловой скорости (юс) и от коэффициента мощности двигателя (созф).
100 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ ПУСКОМ И ТОРМОЖЕНИЕМ АСИНХРОНИЗИРОВАННОЙ МАШИНЫ | 2011 |
|
RU2466492C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2189104C2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2283247C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207701C1 |
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| Асинхронизированная синхронная машина | 1974 |
|
SU780102A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504728A1 |