. 1 Изобретение относится к электротехнике, а более конкретно к электрическим машинам переменного тока. Известна синхронная машина переменно го тока Cll содержащая на статоре трехфазную обмотку, а на роторе однофазную обмотку возбуходения. Основным недостатком синхронной машины является невысокая устойчивость, т.е. даже при применении сильного регулирования ее устойчивость ограничена углом 90-100 , кроме, с помощью синхронной машины нельзя устранить электромагнитную неустойчивость (явление емкостного самовозбуждения) . .
Наиболее близким к данному изобретению является асинхроннаированная синхронная машина 2 или так Называемая управля1емая машина переменного тока, содержащая на статоре 3-х фазную обмотку, aiна роторе многофазную обмотку возбуждения (минимально возможное число обмоток возбуждения - два). Благодаря многофазно, обмотке возбуждения и при выборе соответствующего закона управления с помощью регулятора работой тиристорного преобразователя частоты системы возбуждения возможности машины по устойчивости сущестёенно выше, чем у синхронной машины. Кроме того, у асинхронизированной синхронной машины есть 5 возможность раздельно (т.е. независимо друг от друга) управлять активной мощностью И реактивной мощностью.. , .
Недостатком известной асинхрони10 зированной синхронной машины является то, что машина требует ротОр сложной конструкции с многофазной обмоткой возбуждения.
Целью изобретения является упро15 шение и расширение функциональных возможностей асинхроиизироваяной синхронной машины с многофазной обмоткой возбуждения.
Поставленная цель достигается 20 тем, что асинхронизированно-синхронйая машина с Дйумя и более обмоткаМи возбуждения, содержащая регулятор, входа которого соединены с датчиком частоты сети и датчиком мощности, ; 25 а выход через преобразователь частоты связан с обмотками возбуждения выполнена в виде каскада двух и более машин, валы которых соединены меж- j ду собой, обмоток статоров или 30 роторов сдвинуты на заданный угол.
обмотки статоров соединены между собой и через датчик мощности,выполненный общим для машинкаскада, , подключены к сети, а на роторе каждой Машины расположена одна обмотка возбуждения .
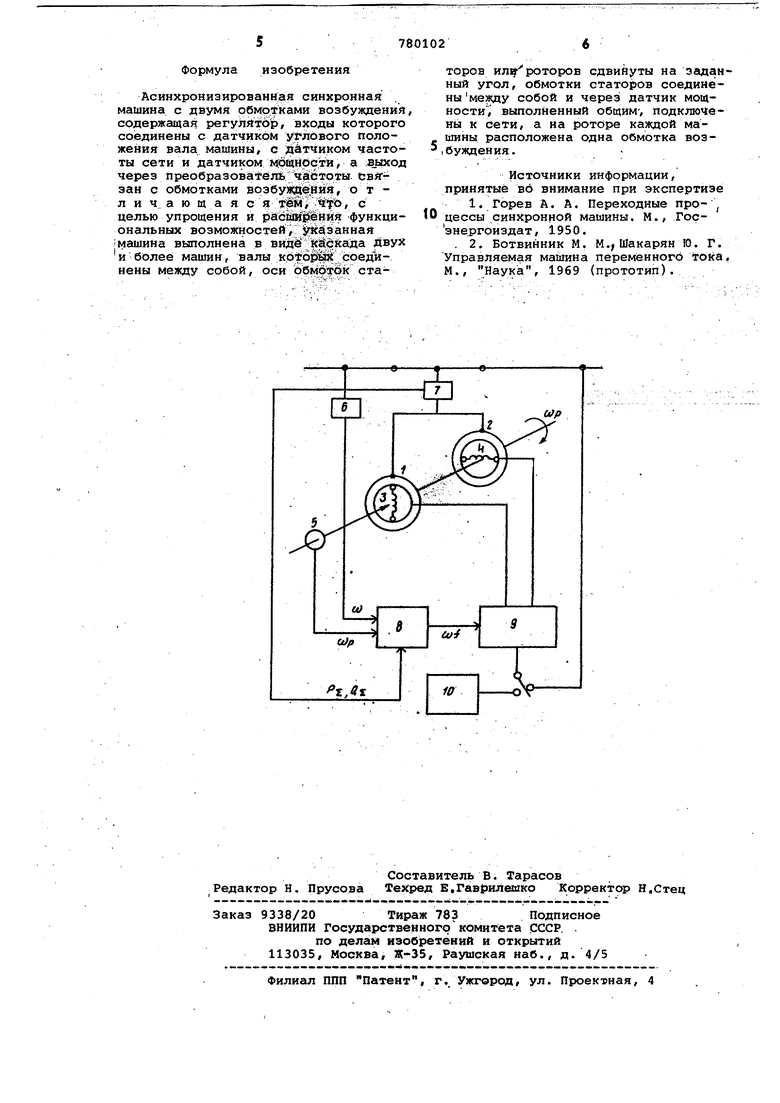
На приведена .структурная схема асинхрОнизированной синхронно машины, содержащей синхронные машины 1 и 2, роторы которых соединены жестко между собой и содержат соот-ветственно обмотки 3 и 4 возбуждениям
Выходы датчика 5 углового положения вала машины, датчика 6 частоты сети и датчика7 мощности соединены со входами регулятора 8, выхОд которого соединен через преобразователь частоты 9 с указанными обмотками 3 и 4 возбуждения. При этом обмотки статоров синхронных машин 1 и 2 через общий датчик 7 мощности подсоединены к сети. Питание преобразователя 9 частоты осуществлется Или от сети, или от независимого источника 10.
На чертеже показан случай, когда продольные оси обмоток 3 и 4 возбуждения машин 1 и 2 сдвинуты друг относительно друга на Тй/2 электри-ческих градусов (обозначим этот угол сдвига Ч .). В принципе этот уго может быть любым, не равным n7u, где п 0,1; 2 -. . . Но практически его значения должны находиться в диапазоне СУ Ч , так как все остальные значения угла могут быть получены из этого диапазона, комбинируя знаки напряжения возбуждения в обмотках возбуждения. Работает асин3{ронйзированная синхронная машина следующим образом.
При .отклонении значений активной И реактивной мощности от заданных значений по сигналам датчика 7 мощнти в регуляторе 8 соответственно . меняются по амплитуде формируемые с частотой скольжения машин каскада сигналы регулирования, а следователно, и амплитуды сигналов напряжения возбуждения на выходах преобразователя 9j частоты подаваемых в обмотки 3 и 4 возбуждения. При этом нера- , вёнство электромагнитного момента и момента на валу вызывает изменение скорости вргоцения машин каскада, а следовательно, и частоты, сигналов регулирования , подводимых к обмоткам возбуждения тййшйн каскада, до нового установившегося режима, который будет характеризоваться тем же BbcdfaHOBленными Значениями а ктнвной и реактивной мощности, новым скольжением , Новой частотой и амплитудой напряжения на входах обмоток 3 и 4 воэбуясдёния. Каскёд работает аналогично асйнхрониЗйрованной синхронной машине, как при
нулевом скольжении, так и при не нулевом скольжении.
Асинхронизированная синхронная -машина из каскада синхронных машин может быть использована в качестве привод,а, генераторов и компенсаторов. При этом, если каскад расчитан на работу с нулевым скольжением то угол Ч/ надо выбирать величины, наиболее удовлетвдряющей требованиям режима. Если же каскад расчитан на работу с ненулевым скольжением, то нужно взять ЧгТг / (для двухфазной обмотки возбуждения). Например при двухдвигательном приводе прокатных, станов или мельниц, нагрузка кото-рых носит колебательный характер, устройство устранит их влияние на сеть, что повышает качество электроэнергии в узле. Но так как в устройстве применен каскад двух синхронных машин, то при последовательном соединении их статорных обмоток, если приложить к ним двойное напряжение, требуется в два раза меньше установленной мощности тиристорных преобразователей частоты, система возбуждния, чем для обычных асинхронизированных синхронных машин, той же суммарной установленной мощности, что упрощает; устройство.
При применении соответствующего закона регулирования возбуждения каскада двух синхронных компенсаторов может быть осуществлена их работ с отрицательными токами возбуждения, т.е. можно перевести их в режим потребления реактивной мощности из сети увеличить статическую устойчивость каскада генераторав, работающих на длинные линии электропередачи, так как каскад может работать в режимах., нeдoпycтимьix по условиям статической устойчивости на обычных синхронных машинах, что расширяет функциональные возможности синхронных машин.
При регулировании возбуждения каскада с использованием соответствующего закона улравления, например, по первой производной магнитного потока, обусловленного свободными резонансными токами статорной цепи, можно устранить электромагнитную неустойчивость, емкостное самовозбуждение, при работе на длинную линию или при наличии на ней 5 продольной компенсации.
В каскаде возможно сочетание различных по мощности синхронных машин при обеспечении высокой устойчивости 0 работы каскада.
Таким образом, указанное соединение двух синхронных машин позволяет получить каскад, обладающий свойствами асинхронизированно-синхроНной 5 машины.
Формула изобретения
Асинхронизированная синхронная машина с двумя обмотками возбуждения содержащая регулятор, входы которого соединены с датчиком углового положения вала машины, с датчиком частоты сети и датчиком мощности, а ;8ыход через преобразователь частоты, ьвяг зан с обмотками возбуждения, отличающаяся тем, , с целью упрощения и расшв ения функциональных возможностей, указанная машина выполнена в виде кабка;ца двух и более машин, валы которых соединены между собой, оси обмоток статоров ил роторов сдвинуты на заданный угол, обмотки статоров соединены между собой и через датчик мощности, выполненный общим-, подключены к сети, а на роторе каждой машины расположена одна обмотка воз,буждения.
Источники информации, принятые во внимание при экспертизе 1. Горев А. А. Переходные про0цессы синхронной машины. М., Госэнергоиздат, 1950.
. 2. Ботвинник М. М., Шакарян Ю. Г. Управляемая машина переменного тока М., Наука, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления синхронной машиной | 1979 |
|
SU900398A1 |
| Устройство для связи двух энергосистем | 1980 |
|
SU955356A1 |
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Агрегат бесперебойного электроснабжения | 1988 |
|
SU1658281A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Система возбуждения асинхронизированной синхронной машины | 2021 |
|
RU2761246C1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
