Настоящее изобретение относится к области автоматизации систем управления и может быть использовано в качестве сигнализатора, сообщающего на пульт управления информацию о полол ении в данный момент какоголибо перемещаемого органа исполнительного механизма, уровня и т. д.
Известны пневматические цифровые указатели перемещения, в которых показания с кодовой линейки считываются с помощью системы открытых сонел, располагающихся с разных сторон линейки против прорезей. Такое выполнение щифратора ведет к повышенному расходу воздуха и не позволяет располагать щнфратор в труднодоступных и загрязненных местах.
Предложенный пневматический цифровой указатель линейного перемещения, содержит, как и известные, шифратор с кодовой линейкой, линии связи и дешифратор, выполненный в виде последовательно соединенных пар «цилиндр-поршень и отличается тем, что с целью уменьшения расхода воздуха и расширения функциональных возможностей указателя в нем шифратор содержит расположенные вдоль прорезей кодовой линейки эластичные трубки, механически связанные с прижимным валиком, причем концы всех трубок соединены между собой и с каналом подачи воздуха на питание, а верхние концы соединены через линии связи с соответствующими входами дешифратора.
Выполнение указателя но предложенной схеме позволяет расширить возможности прилгенения устройства при одновременном уменьшении расхода воздуха на питание.
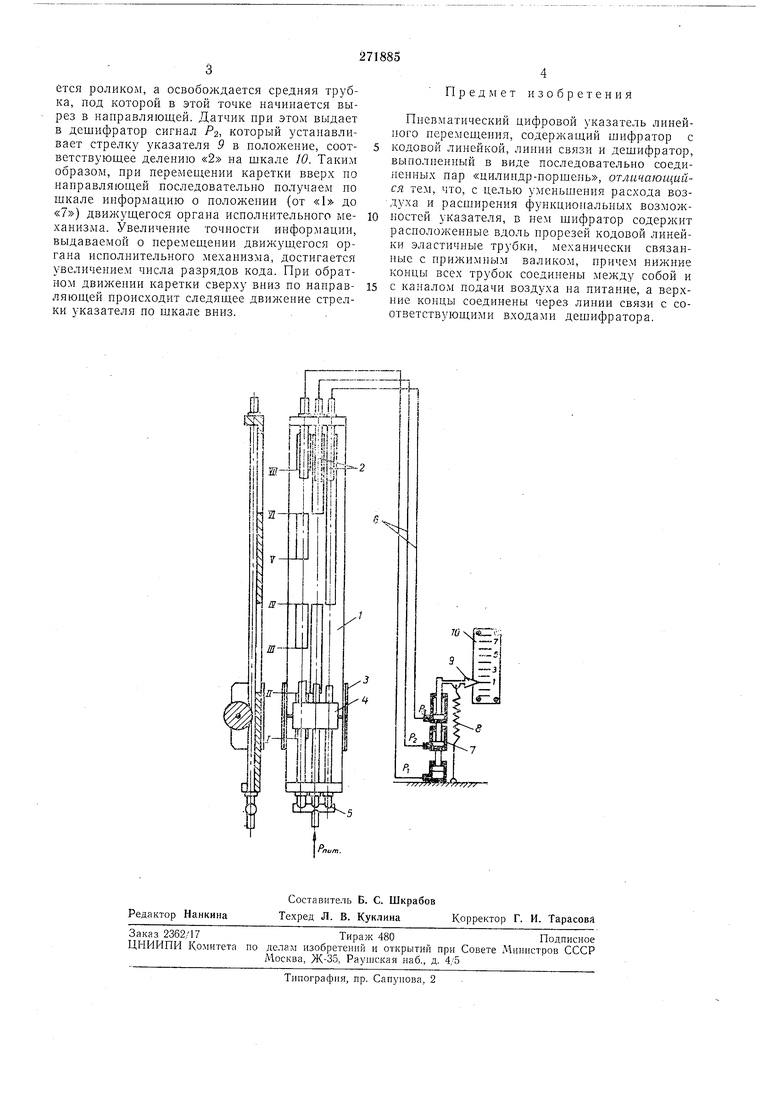
Схема указателя представлена на чертеже, где обозначены: 1 - кодовая лииейка; 2 - эластичные трубки; 3 - направляющая каретка; 4 - прижимной ролик; 5 - канал питания; 6 - линия связи; 7 - последовательно соединенные пары «цилиндр-поршень с ходами цилиндров, пропорциональными разрядам двоичного кода; 8 - пружина; 9 - указатель; 10 - шкала.
Указатель работает следующим образом. При нахождении каретки 3 в крайнем нижнем положении все трубки (на схеме показан трехразрядный указатель перемещения) зажимаются роликом 4, и выходные сигналы в дешифратор не поступают. При перемещении каретки, связанной с движущимся органом исполнительного механизма, вверх ио направляющей ролик перестает зажимать левую трубку в точке /, где начинается вырез в кодовой линейке, и в дешифратор поступает сигнал PI, под действием которого стрелка указателя 9 переходит в положение «1 по шкале 10. При последующем подъеме каретки по направля
| название | год | авторы | номер документа |
|---|---|---|---|
| Сборочный робот | 1986 |
|
SU1355477A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ НА ПОЛОСУ МАТЕРИАЛА ПО МЕНЬШЕЙ МЕРЕ ОДНОГО УЧАСТКА ПОВЕРХНОСТИ ПЕРЕНОСНОГО СЛОЯ ПЕРЕВОДНОЙ ФОЛЬГИ И ЕГО ПРИМЕНЕНИЕ | 2005 |
|
RU2370370C2 |
| УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА ОПТИМАЛЬНОГО ПОИСКА НЕИСПРАВНОСТЕЙ | 1967 |
|
SU206170A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ И РАЗМЕРОВ ПОРОКОВ РУЛОННЫХ МАТЕРИАЛОВ | 1991 |
|
RU2068541C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ НАБОРНОЙ СТРОКООТЛИВНОЙ МАШИНОЙ | 1970 |
|
SU268769A1 |
| Грузозахватное устройство | 1988 |
|
SU1696371A1 |
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| Устройство для подачи полосового и ленточного материала в зону обработки | 1989 |
|
SU1708476A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| Устройство для подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1782692A1 |
