известны устройства для измерения восстающих и нисходящих пологона.клонных скважин, включающие корпус, электромагнит, вращающуюся рамку, маятник и оиору маятника.
Предложенное устройство отличается от известных тем, что маятник выполнен в виде системы из трех стержней, находящихся в одной плоскости и жестко связанных концами у оси качания, средний стержень маятника расположен перпендикулярно продольной оси датчика, а два крайних стержня располол ены по отношению к среднему под углами не менее 35°.
Это .повышает чувствительность устройства.
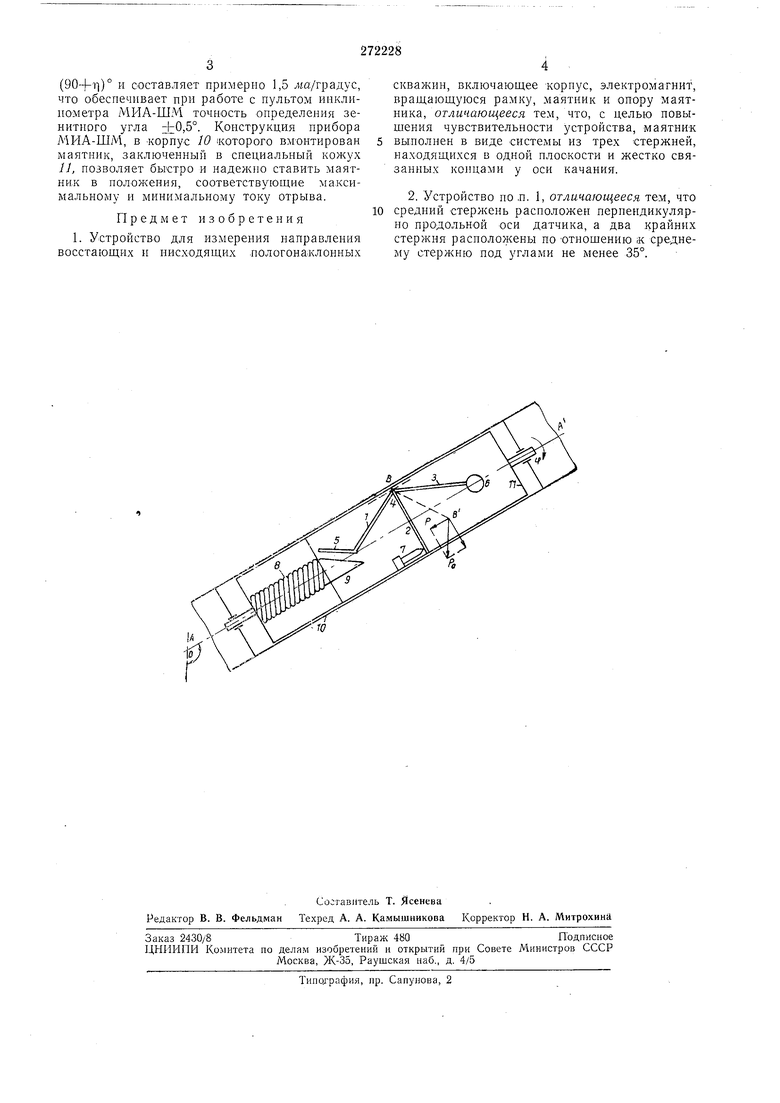
На чертеже изображено предложенное устройство.
Маятннк представляет собой систему из трех латунных стержней 1-3, жестко скрепленных между собой осью качания 4. На конце стержня / имеется пластина 5 из желе.за, обладающего ничтожной остаточной намагниченностью. Стержень 3 заканчивается сменным грузиком 6. Под стерж ень 2 подведена опора 7, препятствующая поворотам всей системы в налравлении действия силы Р.
Составляющая силы тяжести Р, приложенная к опоре 7, определяется соотношением;
е РО - вес маятника;
в - зенитный угол нрибора (скважипы);
Т) -угат между осью маятника ВВ и лернендикуляром к геометрической оси прибора (скважины) ЛЛц
Ф -апсидальный угол, т. е. угол между некоторой условной нулевой плоскостью и плоскостью искривле)ия скважины, измеренный в сечении, нормальном к геометрической оси прибора.
Если через обмотку электромапшта 8 пропускать электрический ток, то при некоторой силе тока стержень / прнтянется к сердечнику 9 электромагнита, п стержень 2 оторвется от опоры 7.
Сила тока отрыва маятника от опоры будет связана прямой зависимостью с давлением стержня 2 на опору, т. е.
(cos в-cos Ti-l-sin 0-sin ii-sin q-),
где С - некоторая постоянная, определяемая
при эталонировке прибора.
По величине / после эталопировки прибора определяются в конечном итоге зенитный угол 0 и апсидальный угол ф по известной методике.
(90+ii)° и составляет примерно 1,5 .иа/градус, что обеспечивает при работе с пультом инклинометра МР1А-ШМ точность определения зенитного угла +0,5°. Конструкция прибора МИА-ШМ, в Kopnyc 10 которого вмонтирован маятник, заключенный в специальный кожух 11, позволяет быстро и надежпо ставить маятник в положения, соответствующие максимальному и минимальному току отрыва.
Предмет изобретения
1. Устройство для измерения направления восстающих и ннсходящих лологона клонных
скважин, включающее корпус, электромагнит, вращающуюся рамку, маятник и опору маятннка, отличающееся тем, что, с целью повыщения чувствительности устройства, маятни-к выполнен в виде системы из трех стержней, находящихся в одной плоскости и жестко связанных концами у оси качания.
2. Устройство по ,п. 1, отличающееся тем, что средний стержень расположен перпендикулярно продольной оси датчика, а два крайних стержня расположены по отнощению к среднему стержню под углами не менее 35°.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ СКВАЖИНЫ | 1991 |
|
RU2017950C1 |
| ИНКЛИНОМЕТР ДЛЯ НИСХОДЯЩИХ СКВАЖИН | 2006 |
|
RU2352775C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕМЕНТОВ ЗАЛЕГАНИЯ АКУСТИЧЕСКИХ ОТРАЖАЮЩИХ ГРАНИЦ | 1970 |
|
SU285265A1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
| Скважинное ориентирующее устройство | 1983 |
|
SU1154446A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1997 |
|
RU2121575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1992 |
|
RU2057291C1 |
| Прибор для ориентирования искусственных отклонителей в скважине | 1980 |
|
SU939744A1 |
