Изобретение относится к области промысловой геофизике и может быть использовано для определения зенитного и визирного углов траектории скважины и скважинных объектов.
Известен способ определения зенитного и визирного углов, включающий измерение сигналов с датчиков угла поворота, установленных на осях вращения одностепенных маятников, расположенных в корпусе скважинного прибора так, что оси вращения маятников и продольная ось корпуса прибора образуют прямоугольную систему координат, и определение зенитного и визирного углов по измеренным сигналам [1].
Кроме того известен способ определения зенитного и визирного углов, реализованный в устройстве [2], в котором измеряют сигналы с датчиков угловых перемещений, установленных на осях вращения одностепенных маятников, расположенных в корпусе преобразователя так, что оси их вращения и продольная ось корпуса образуют прямоугольную систему координат, а зенитный и визирный углы определяют по измеренным значениям сигналов с датчиков [2].
Недостатки аналогов следующие. Ограниченный диапазон измерений по зенитному углу (θ≤45°), обусловленный тем, что при больших значениях зенитного угла (θ<45°) устанавливающий момент одного из маятников в определенных диапазонах визирного угла может быть неэффективным, что приводит к большим погрешностям измерений.
Наиболее близким по технической сущности и достигаемому результату является способ определения зенитного и визирного углов, реализованный в устройстве [3], включающий установку в корпусе преобразователя трех одностепенных маятников с датчиками угловых перемещений, измерение сигналов с датчиков, дискретизацию диапазонов измерения, селективный выбор сигналов с двух датчиков из трех, устанавливающие моменты маятников которых в данных диапазонах являются наиболее эффективными, и определение зенитного и визирного углов по измеренным сигналам [3].
Недостатки прототипа: низкая точность определения зенитного θ и визирного ϕ углов, обусловленная тем, что при обработке результатов измерений не учитывают угловые параметры отклонения осей вращения маятников от ортонормированного базиса прямоугольной системы координат корпуса.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности определения зенитного и визирного углов путем учета априорно измеренных угловых параметров отклонения осей вращения маятников от базиса корпуса, характеризующих инструментальные погрешности.
Поставленная задача достигается тем, что в способе определения зенитного и визирного углов, реализованном в устройстве [3]; включающем установку в корпусе преобразователя трех одностепенных маятников с датчиками угловых перемещений, измерение сигналов с датчиков, дискретизацию диапазонов измерения, селективный выбор сигналов с двух датчиков из трех, устанавливающие моменты которых в данных диапазонах являются наиболее эффективными, и определение зенитного и визирного углов по измеренным сигналам, маятники устанавливают так, что оси их вращения ориентированы перпендикулярно продольной оси корпуса, а в проекциях на апсидальную плоскость - плоскость, перпендикулярную продольной оси корпуса, составляют между собой углы в 120o, измеряют угловые параметры δi и χi(i = 1,2,3), характеризующие инструментальные погрешности, а зенитный θ и визирный φ углы определяют по измеренным значениям углов поворота маятников βi ( i = 1, 2, 3) и численным значениям δi и χi (i = 1, 2, 3).
Пример конкретного выполнения способа. На фиг. 1 представлена реализация предложенного способа в преобразователе зенитного и визирного углов, содержащем корпус 1, три I м, II м, III м) одностепенных маятников 2, 3 и 4, на осях вращения которых установлены датчики угловых перемещений (ДУП) 5, 6 и 7, мультиплексор 8, аналого-цифровой преобразователь (АЦП) 9, телеметрическую линию связи 10, вычислительное устройство (ВУ) 11 и блок управления 12. Оси вращения маятников I м, II м и III м перпендикулярны продольной оси OO1 корпуса 1, а их проекции на апсидальную плоскость (плоскость, перпендикулярную продольной оси OO1) составляют между собой углы в 120o. Прямоугольная система координат - базис (R0 (O, X0, Y0, Z0) связана с корпусом 1, а базисы R1 (O, X1, Y1, Z1), R2 (O, X2, Y2, Z2) и R3 (O, X3, Y3, Z3) связаны соответственно с первым (I м) маятником 2, вторым (II м) маятником 3 и третьим (III м) маятником 4, причем оси OX1, OX2 и OX3 направлены вдоль осей вращения маятников и, кроме того, ось OX1 совпадает с осью OX0 базиса корпуса R0 (O, X0, Y0, Z0). В идеальном случае, т. е. при отсутствии углов отклонения осей вращения маятников δi и χi (i = 1, 2, 3) от осей OX1, OX2 и OX3 их базисов, сигналы датчиков угловых перемещений или углы поворота маятников β1,β2 и β3 связаны с искомыми зенитным θ и визирным φ углами следующей системой уравнений:
Анализ кинематической схемы данного преобразователя на основе трех одностепенных маятников с точки зрения физической природы маятника позволяет определить для каждого маятника диапазоны визитного φ угла при больших значениях зенитного θ угла (θ>45°), в которых его устанавливающий момент становится неэффективен: для первого маятника I м 0 - 30, 150 - 210, 330 - 360o; для второго маятника II м 30 - 90, 210 - 270o; для третьего маятника III м 90 - 150, 270 - 330o.
Поэтому в первом диапазоне искомые зенитный θ и визирный φ углы определяют по измеренным значениям β2 и β3 во втором диапазоне - по β1 и β3 в третьем диапазоне - по β1 и β2.
Сигналы β1,β2 и β3 с датчиков угловых перемещений 5, 6 и 7 через мультиплексор 8 поступают на вход АЦП 9, где преобразуются в цифровые коды Qi(i = 1, 2, 3), пропорциональные углам поворота маятников 2, 3 и 4 при их ориентировании по вектору силы тяжести при отклонении корпуса 1 от вертикали на зенитный угол θ и его повороте вокруг собственной оси на визирный угол φ, отсчитываемый в апсидальной плоскости относительно плоскости наклона.
Далее коды Qi (i = 1, 2, 3) с выхода АЦП 9 через ТЛС10 поступают в ВУ11 для дальнейшей обработки результатов измерения. БУ12 отрабатывает управляющие команды на мультиплексор 8, АЦП 9 и ТЛС10.
При реальном изготовлении преобразователя и сборке в соответствии с разбросом технических и технологических параметров в пределах полей допусков возникают отклонения осей вращения маятников от осей OXj, базисов Rj (j = 1, 2, 3), выражающиеся численными значениями углов δi и χi (i = 1, 2, 3), которые обусловливают возникновение инструментальных погрешностей измерения: δ1 - угол отклонения оси вращения первого маятника от оси OX1 в плоскости OX1Z1 базиса OX1Y1Z1, связанного с первым маятником, параметр δ2 - угол отклонения оси вращения второго маятника от оси OX2 в плоскости OX2Z2 базиса OX2Y2Z2, связанного со вторым маятником, параметр χ2 - угол отклонения оси вращения второго маятника от оси OX2 в плоскости OX2Y2 базиса OX2Y2Z2, параметр δ3 - угол отклонения оси вращения третьего маятника от оси OX3 в плоскости OX3Z3 базиса OX3Y3Z3, связанного с третьим маятником и параметр χ3 - угол отклонения оси вращения третьего маятника от оси OX3 в плоскости OX3Y3 базиса OX3Y3Z3.
При ненулевых значениях δi и χi (i = 1, 2, 3) углы β1,β2 и β3 поворота маятников 2, 3 и 4 связанны с определяемыми зенитным θ и визирным φ углами уравнениями:
где ψ = φ+120°,ω = φ-120°.
Искомые углы θ и φ в соответствии с данными уравнениями в дискретизированных диапазонах визирного угла с учетом того, что величины δi и χi малы, т. е. sinδi≈ δi, cosδi= cosχi≈ 1, sinχi≈ χi определяют следующим образом: в первом диапазоне φ 0-30o, 150-210oC, 330-360oC
во втором диапазоне φ 30-90o, 210-270o
в третьем диапазоне φ 90-150o, 270-330o
Угловые параметры δi и χi (i = 1, 2, 3), входящие в данные выражения, определяют априорно в следующей последовательности. Задают корпусу 1 зенитный угол θ, равный 45o, и вращают вокруг продольной оси ОО1 до достижения нулевого сигнала с ДУП4 первого (1 м) маятника 2 (т.е. до достижения β1= 0). Это пространственное положение принимают за начало отсчета визирного угла (φ = 0). Затем поворачивают корпус 1 в положительном направлении на 90o. При этом сигнал с ДУП4 будут соответствовать
откуда находят угловой параметр δ1:
Далее поворачивают корпус до положения φ = -120°.
При этом измеряют значение β21:
из которого находят, ограничиваясь первым приближением, параметр χ2:
χ2= tgβ21.
Затем, корпус преобразователя вращают в положительном направлении, устанавливают φ = -30° и измеряют значение β22:
из которого находят значение угла δ2:
Угловые параметры χ3 и δ3 определяют по значениям β31 и β32 по аналогичной методике, задавая соответствующие повороты корпуса преобразователя на углы φ = 120° и φ = 30°:
χ3= tgβ31;
Итак, заявляемое изобретение позволяет повысить точность определения зенитного θ и визирного φ углов путем априорного измерения угловых параметров δi и χi (i = 1, 2, 3), обусловливающих инструментальные погрешности, и их дальнейшего учета при обработке результатов измерений углов поворота маятников βi (i = 1, 2, 3).
Источники информации
1. Авторское свидетельство СССР N 933968, кл. E 21 B 47/022, 1981.
2. Авторское свидетельство СССР N 1298363, кл. E 21 B 47/02, 1987.
2. Авторское свидетельство СССР N 1328497, кл. E 21 B 47/02, 1987 (прототип).
Способ определения зенитного и визирного углов применяется в промысловой геофизике для определения траектории скважинных объектов. Устанавливают в корпусе три одностепенных маятника с датчиками угловых перемещений, измеряют соответствующие сигналы этих перемещений и выбирают два значения из трех измеренных сигналов в дискретизованных диапазонах визирного угла ϕ, ориентируют оси вращения маятников перпендикулярно продольной оси корпуса и под углом 120° друг к другу в проекциях на аспидальную плоскость, измеряют символизирующий инструментальные погрешности угол отклонения оси вращения каждого i маятника относительно оси ОХi в плоскости ОХiZi базиса OXiYiZi, связанного с соответствующим i-м маятником. Определяют зенитный и визирный углы с учетом угловых перемещений и углов отклонений из соответствующих математических выражений для каждого из трех диапазонов визирного угла 0-30°, 150 - 210°, 330 - 360°; 30-90°, 210 -270°; 90 - 150°, 270 - 330°. Предложенный способ позволяет повысить точность определения зенитного и визирного углов путем учета угловых параметров, характеризующих инструментальные погрешности. 1 ил.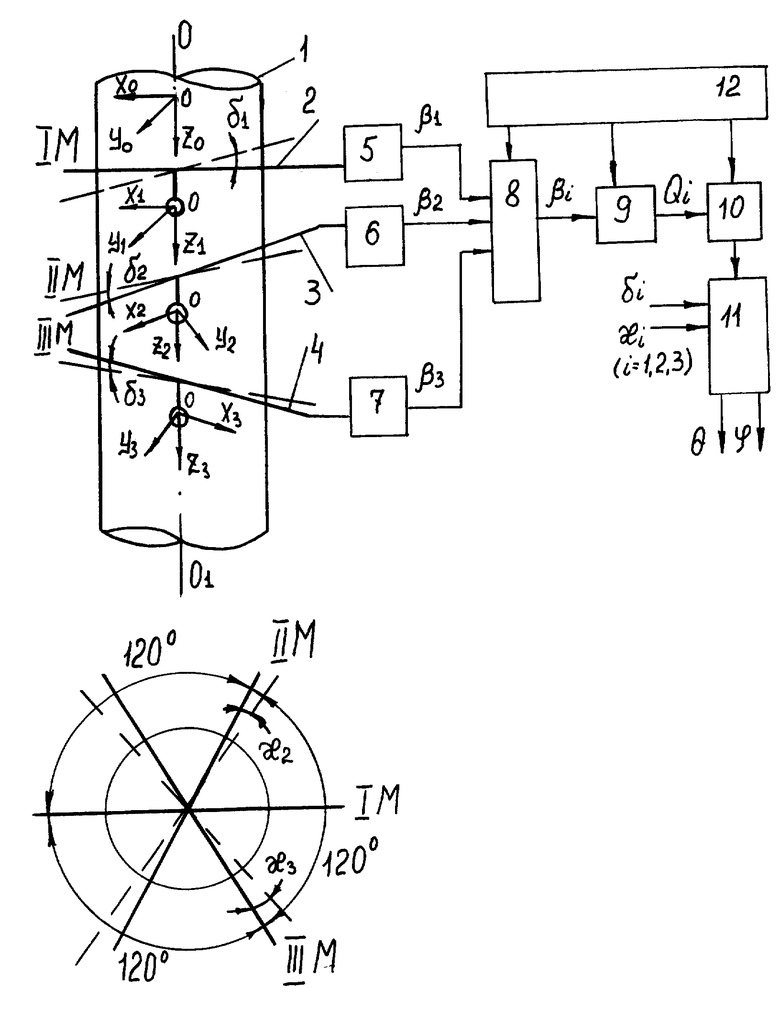
Способ определения зенитного и визирного углов, включающий установку в корпусе трех одностепенных маятников с датчиками угловых перемещений, измерение сигналов с датчиков угловых перемещений β1, β2 и β3, селективный выбор значений, измеренных с двух маятников из трех, в дискретизованных диапазонах визирного угла и определение зенитного и визирного углов по измеренным значениям сигналов с датчиков угловых перемещений, отличающийся тем, что маятники устанавливают так, что оси их вращения ориентированы перпендикулярно продольной оси корпуса, а в проекциях на апсидальную плоскость составляют между собой углы в 120o, измеряют параметр δ1 - угол отклонения оси вращения первого маятника от оси OX1 в плоскости OX1Z1 базиса OX1Y1Z1, связанного с первым маятником, параметр δ2 - угол отклонения оси вращения второго маятника от оси OX2 в плоскости OX2Z2 базиса OX2Y2Z2, связанного с вторым маятником, параметр χ2 - угол отклонения оси вращения второго маятника от оси OX2 в плоскости OX2Y2 базиса OX2Y2Z2, параметр δ3 - угол отклонения оси вращения третьего маятника от оси OX3 в плоскости OX3Z3 базиса OX3Y3Z3, связанного с третьим маятником, и параметр χ3 - угол отклонения оси вращения третьего маятника от оси OX3 в плоскости OX3Y3 базиса OX3Y3Z3, а зенитный θ и визирный ϕ углы определяют следующим образом: в первом диапазоне 0 - 30, 150 - 210, 330 - 360o
во втором диапазоне 30 - 90, 210 - 270o
в третьем диапазоне 90 - 150, 270 - 330o
 t
t
| Преобразователь наклона скважины и угла установки отклонителя бурового инструмента | 1986 |
|
SU1328497A2 |
| Способ определения азимута искривления траектории скважины | 1988 |
|
SU1555470A1 |
| Способ определения пространственного положения скважинного снаряда | 1989 |
|
SU1701901A1 |
| RU 2004786 C1, 15.12.93 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| US 4163324 A, 08.07.79 | |||
| Резервированное устройство | 1972 |
|
SU468242A1 |
| US 4709486 A, 12.01.87 | |||
| US 4999920 A, 05.12.91 | |||
| САМОЛЕТ С ПЛОСКИМ ХВОСТОВЫМ ОПЕРЕНИЕМ | 2002 |
|
RU2220072C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ВИБРАТОРА НА ШПАЛАХ | 0 |
|
SU315743A1 |
