Предлагаемый сиособ относится к управлению асинхрот ным двухдвигательиым агрегатом, у которого один из двигателей имеет поворотный статор.
Существует несколько способов управления такими агрегатами, отличающихся в основном схемой включения в роторную цепь дополнительного сопротивления и его относительной величиной.
При отсутствии этого сопротивления глубокое регулирование скорости агрегата неэкономично.
Способ с последовательным включением сопротивления не позволяет работать в нормальном режиме на естественной характеристике. Для осуществления этого способа необходимо предусматривать устройства, шунтирующие сопротивление.
Способ с параллельпым включением сопротивления иозволяет работать в нормальном режиме на естественной характеристике, однако диапазон регулирования существенно зависит от величины и мощности сопротивления.
Известен также способ, предусматривающий переключение сопротивления с параллельного на последовательное соединение в ироцессе регулирования, значительно расщиря ощий диаиазон регулирования и снижающий величину сопротивления. Однако нри таком способе применяются в главных цепях контакты, снижающие надежиость и увеличивающие габариты схемы управления.
Наиболее близким к предлагаемому являетСИ способ управления механически соединенными валами асинхронными электродвигателями с сопротивлениями, включенными параллельно обмоткам их роторов путем поворота статора одного из двигателей.
Предлагаемый способ повышает к.и.д. агрегата, так как иозволяет изменить скорость вращения агрегата в щироком диапазоне нри любом характере изменения момента сопротивления, полностью пспользуя двигатели без
перегрузок и без огранпченю продолжптельности работы на малых скоростях.
С этой целью регулирование в зоне больщих скоростей осуществляют измененнем угла поворота статора, а в зоне малых скоростей - изменением нанряжения нитаиия, что особенно эффективно при иснользовании изобретения в судостроении.
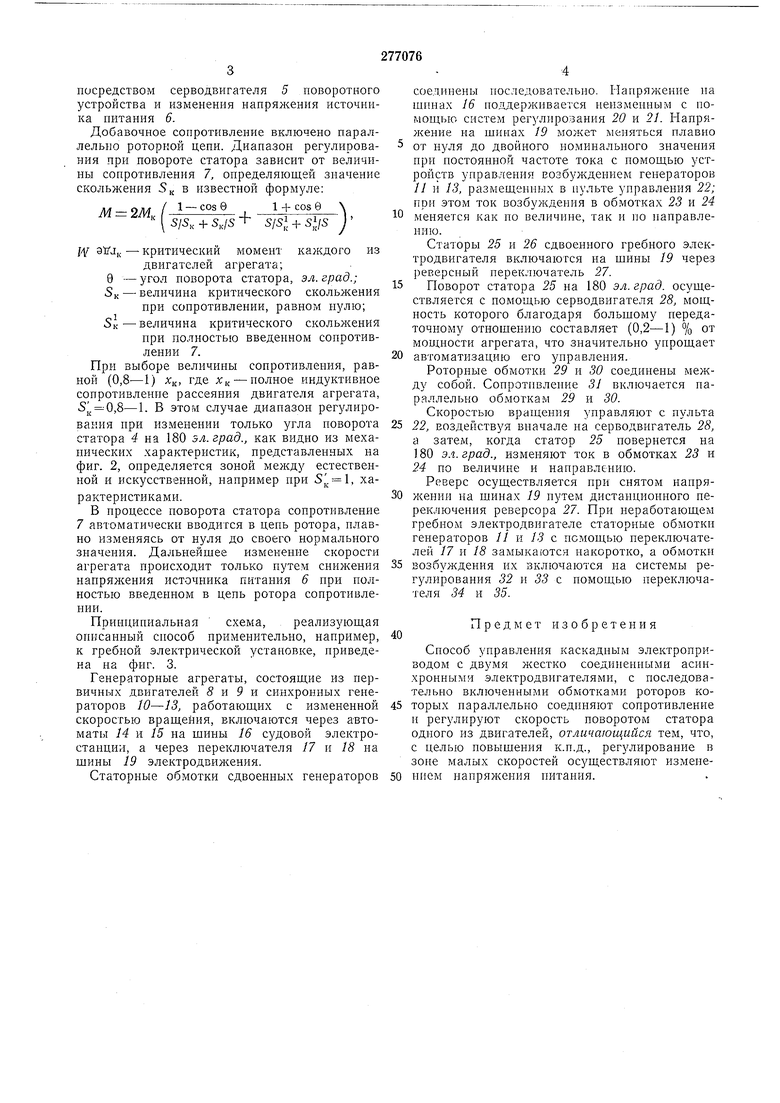
Предлагаемый сиособ иллюстрируется структурной схемой, представленной на фиг. 1,
согласно которой изменение числа оборотов агрегата 1, приводящего во вращение исполнительный механизм 2, осуществляется с поста уиравлення 3 путем последовательного изменения угла поворота одного из статоров
посредством серводвигателя 5 поворотного устройства и изменения напряжения источника питания 6.
Добавочное сопротивление включено параллельно роторной цепи. Диапазон регулирования при повороте статора зависит от величины сопротивления 7, определяющей зпачение скольжения 5 в известной формуле:
-cos в
+ cos е
1 + cos е
2М l + )
5/5,,+5к/5 5/5,
/у al/j,; - критический момент каледого из
двигателей агрегата; 9 -угол поворота статора, эл.град.; SK - величина критического скольжения
при сопротивлении, равном нулю; SK - величина критического скольлсения при полностью введенном сопротивлении 7.
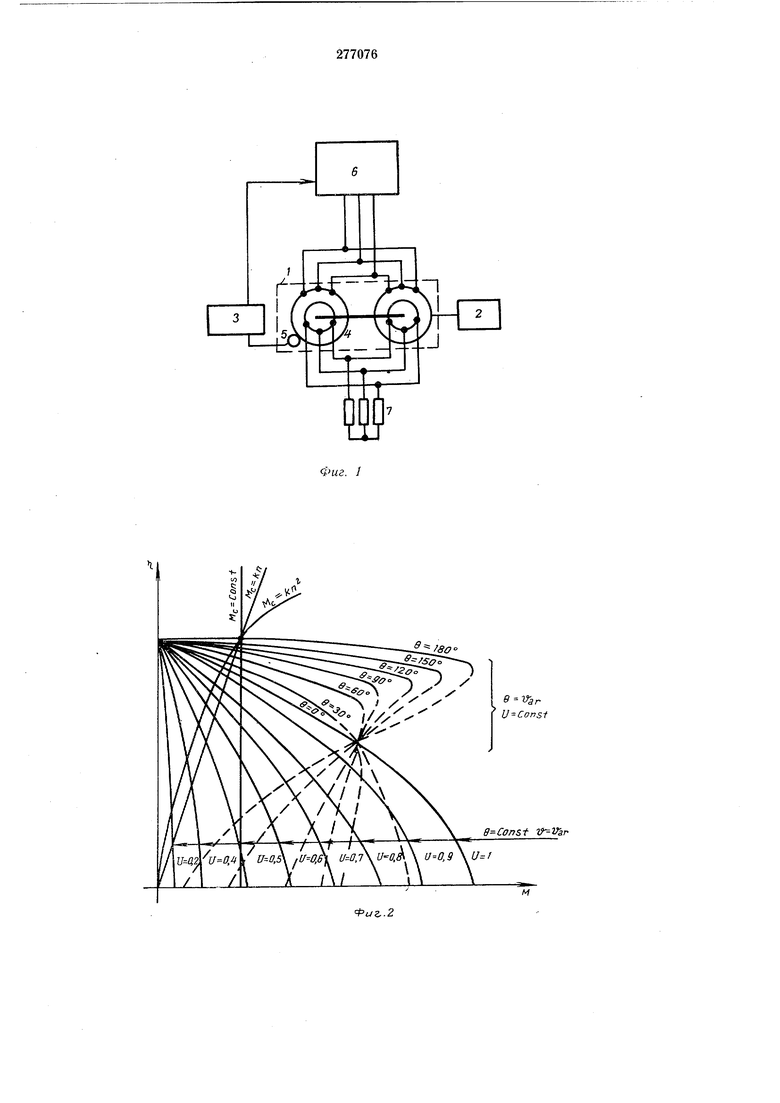
При выборе величины сопротивления, равной (0,8-1) XK, где XK -полное индуктивное сопротивление рассеяния двигателя агрегата, Sj 0,8-1. В это ГУ случае диапазон регулирования при изменении только угла иоворота статора 4 на 180 эл.град., как видно из механических характеристик, представленных на фиг. 2, определяется зоной между естественной и искусственной, например при 5| 1, характеристиками.
В процессе поворота статора сопротивление 7 автоматически вводится в цеиь ротора, плавно изменяясь от нуля до своего нормального значения. Дальнейшее изменение скорости агрегата происходит только путем сиижения напряжения источника питания 6 при полностью введенном в цепь ротора сопротивлении.
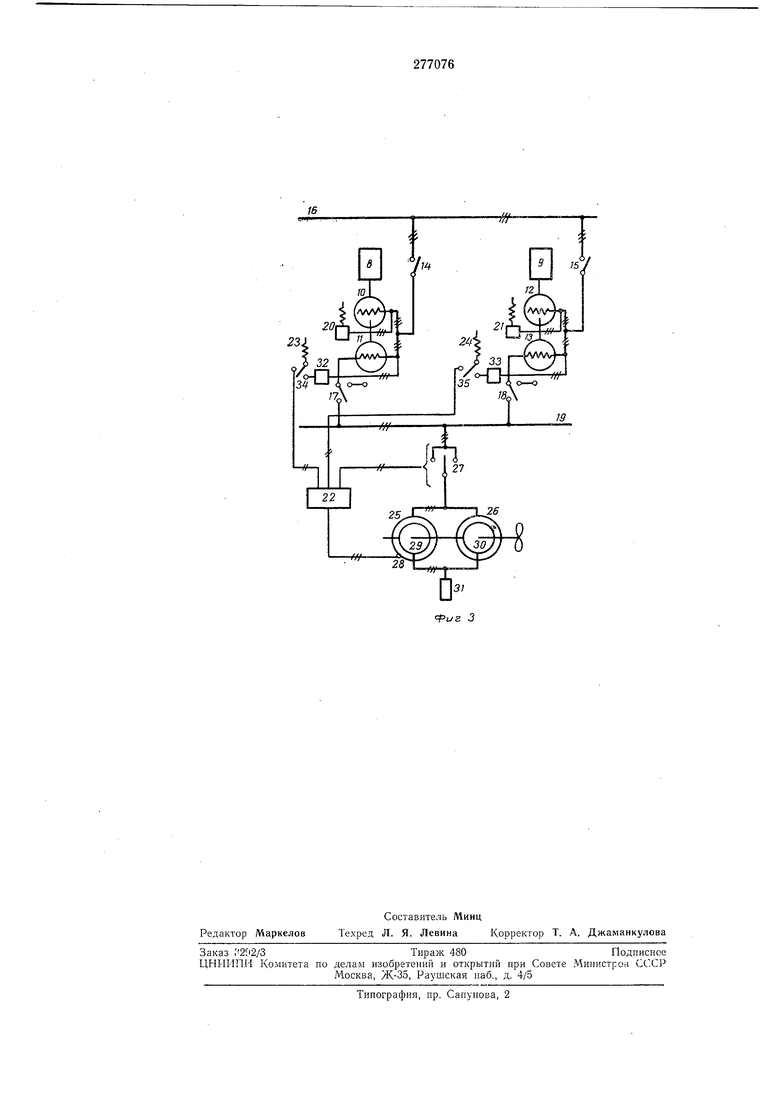
Принциниальная схема, реализующая описанный сиособ применительно, наиример, к гребиой электрической установке, ириведена на фиг. 3.
Генераторные агрегаты, состоящие из первичных двигателей 5 и 9 и синхронных генераторов 10-13, работающих с измененной скоростью вращения, включаются через автоматы 14 и 15 на шины 16 судовой электростанции, а через переключателя 17 и 18 иа шины 19 электродвижения.
Статорные обмотки сдвоенных генераторов
соединены последовательно. Напряжение на шинах 16 иоддерживается неизменным с помощью систем регулирования 20 и 21. Напрялсение на шинах 19 может меняться плавно от нуля до двойного номинального значения при постоянной частоте тока с помощью устройств управления возбуждением геиераторов 11 и 13, размещепиых в пульте управления 22; при этом ток возбуждения в обмотках 23 и 24
меняется как по величипе, так и по направлению.
Статоры 25 и 26 сдвоенного гребного электродвигателя включаются иа шины 19 через реверсный переключатель 27.
Поворот статора 25 на 180 эл.град. осуществляется с помощью серводвигателя 28, мощность которого благодаря больщому нередаточиому отношению составляет (0,2-1) % от моищости агрегата, что значительно уирощает
автоматизацию его управления.
Роторные обмотки 29 и 30 соединены между собой. Сопротивлепие 31 включается параллельно обмоткам 29 и 30.
Скоростью вращения управляют с пульта
22, воздействуя вначале па серводвигатель 28, а затем, когда статор 25 повернется на 180 э.г.град., изменяют ток в обмотках 23 и 24 по величине и иаправлению.
Реверс осуществляется ири снятом напряжении на щинах 19 путем дистанциоиного переключення реверсора 27. При неработающем гребном электродвигателе статорные обмотки генераторов // и 13 с помощью иереключателей 17 и 18 замыкаются накоротко, а обмотки
возбуждения их включаются иа системы регулирования 32 и 33 с помощью переключателя 34 и 35.
Предмет изобретения
Сиособ управления каскадиым электроприводом с двумя жестко соедииенными асинхронными электродвигателями, с последовательно включенными обмотками роторов которых иараллельно соединяют соиротивление и регулируют скорость поворотом статора одпого из двигателей, отличающийся тем, что, с целью повышения к.п.д., регулирование в зопе малых скоростей осуществляют измепением напряжения иитапия.
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1774439A1 |
| ЭЛЕКТРОПРИВОД | 1970 |
|
SU262256A1 |
| ЭЛЕКТРОПРИВОД | 1970 |
|
SU262258A1 |
| Регулятор для гидроэлектрического агрегата | 1944 |
|
SU70906A1 |
| УСТРОЙСТВО ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2369002C2 |
| Автоматический регулятор возбуждения для синхронной машины | 1980 |
|
SU917297A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2380821C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ КНБК В ВИДЕ ТРУБЫ В ТРУБЕ | 2012 |
|
RU2616956C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
s-v-зг
U Cons-t
e ConSf
