Изобретение относится к области вибрационной техники, а именно к электрогидравлическим вибраторам, действие которых основано на преобразовании электрического сигнала задающего генератора в переменный поток жидкости, возбуждающий механические колебания нодвижного элемента исполнительного механизма.
Известные электрогидравлическне вибраторы содержат задающий генератор, исполнительный механизм в виде поршневого гидросервомотора, электрогидравлнческий преобразователь для создания переменного потока жидкости в полостях поршневого гидросервомотора и цепь отрицательной связи, включающую датчик положения (или нагрузки) порщня гидросервомотора, усилитель сигнала датчика и усилитель рассогласования сигналов датчика и задающего генератора. В этих устройствах применяют электрогидравлический преобразователь с двумя гидроусилителями, имеющими одинаковые частотные характеристики и параллельно соединенными выходными каналами, на один из электромеханических преобразователей, управляющих гидроусилителями, подается сигна задающего генератора, а на другой - сигнал датчика обратной связи через высокочастотный фильтр. Такое выполнение устройства позволяет в определенной мере компенсировать нелинейные искажения, вносимые гидроусилителями и гидросервомотором. Однако известные электрогидравлические вибраторы имеют узкий частотный диапазон, обусловленный тем, что гидроусилители на большие расходы жидкости имеют низкую частоту среза, а гидроусилители с широким диапазоном рабочих частот не обеспечивают необходимых перемещений цоршня гидросервомотора на
0 низких частотах.
Узкую зону линейности, что объясняется наличием постоянной составляющей во входном сигнале (в целях регулирования среднего положения поршня гидросервомотора).
5 Предлагаемый электрогидравлический вибратор отличается от известных тем, что, с целью расширения частотного диапазона и зоны линейности вибратора, гидроусилители выполнены с различными частотными характеристиками и каждый электромеханический преобразователь связан с задающим генератором через фильтр соответствующих частот.
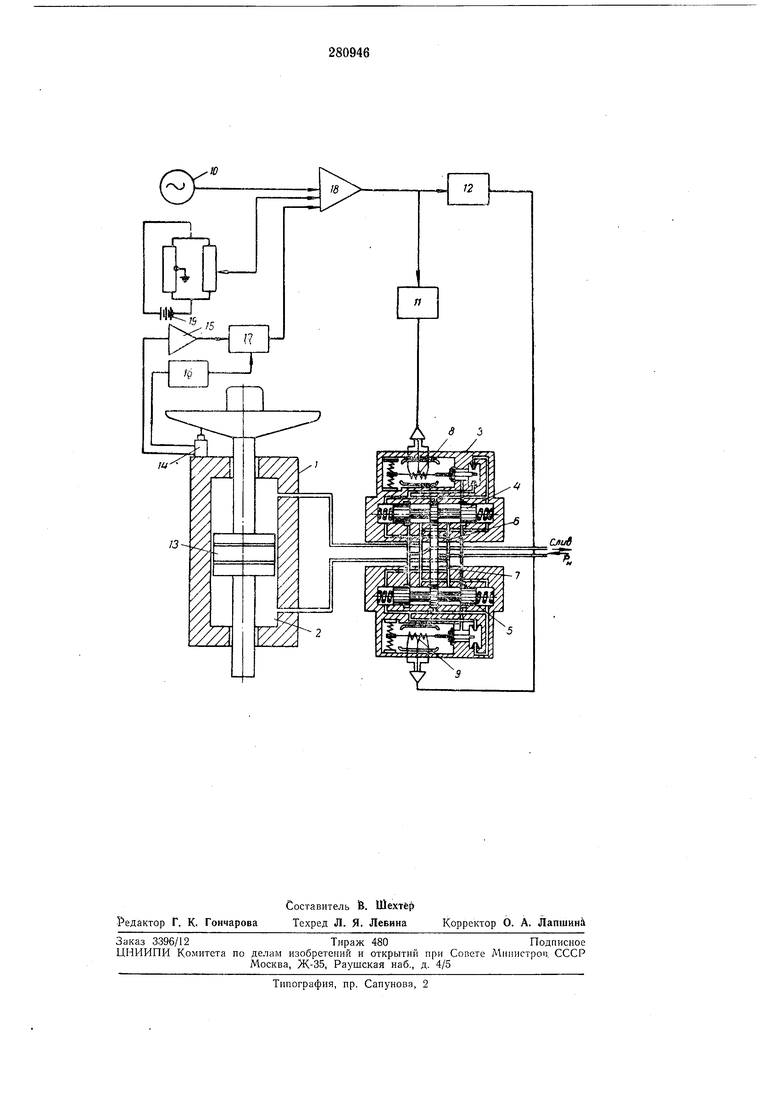
Иа чертеже дана принципиальная схема описываемого устройства.
5 -Исполнительным механизмом вибратора является поршневой гидросервомотор 1, полости 2 которого гидравлически связаны с электрогидравлическим преобразователем 3, содержащим гидроусилители 4, 5 с параллельно соеромеханические преобразователи 8, 9 управляющие гидроусилителями 4, 5. Источником входного сигнала вибратора является задающий генератор 10, питающий электромеханические преобразователи 8, 9 че- 5 рез фильтры 11, 12, каждый из которых иропускает только те частоты, которые лежат в рабочем диапазоне частот соответствующего гидроусилителя. Вибратор имеет цепь отрицательной обрат- 10 ной связи по положению (или нагрузке) иоршня 13 гидросервомотора /. Цепь отрицательной обратной связи состоит из датчика положения (или нагрузки) 14 поршня 13, усилителя 15 сигнала датчика, генератора несущей 15 частоты 16, демодулятора 17 и усилителя рассогласования 18 сигналов датчика 14 и задающего генератора 10. Для регулирования среднего положения поршня 13 вибратор снабжен источником постоянного регулируемого на- 20 пряжения 19. Известно, что зависимость необходимой величины иотока рабочей жидкости через гидроусилитель от виброускорення иодвижного элемента (в данном случае, поршня) вибрато- 25 ра определяется ио формуле W где q - поток рабочей жидкости через гидроусилитель, сл1 /сек; а - виброускорение подвпжиого элемеита, сж/се/сз; 5-эффективная илощадь поршня, см2. Из этой формулы следует, что при увеличе-35 НИИ частоты колебаний величииа потока рабочей жидкости через гидроусилитель, необходимая для создания определенного виброускорения, уменьшается. При использовании нескольких гидроусилителей с различиыми40 частотными характеристиками один из гидро30усилителей обеспечивает необходимое виброускорение на низких частотах и регулировку среднего положения поршня 13. Так как иоток рабочей жидкости через этот усилитель большой, то он будет иметь большие массы золотников и вследствие этого низкую частоту пропускания. Другие гидроусилители, рассчитанные на меньшую величину потока рабочей жидкости, имеют более высокие частоты пропускания. Нелинейность колебаний обусловлена в основном наличием в управляющем сигнале постоянной составляющей. Поскольку в предложенном вибраторе постоянной составляющей будет загружен только самый низкочастотный гидроусилитель, зона линейности вибратора расширяется, Предмет изобретеиия Электрогидравлический вибратор, содержащий задающий геиератор, исиолиительный механизм в виде иоршневого гидросервомотора, электрогидравлический преобразователь для создания .переменного потока жидкости в полостях поршневого гидросервомотора, включающий гидроусилители с параллельно соединенными выходными каналами электромеханические преобразователи, управляющие гидроусилителями, и цепь отрицательной обратной связи, содержащую датчик положения (или нагрузки) поршня гидросервомотора, усилитель сигнала датчика и усилитель рассогласования сигиалов датчика и задающего генератора, отличающийся тем, что, с целью расширения частотного диапазона и зоны линейности, гидроусилители выиолиены с различными частотными характеристиками и каждый электромеханический преобразователь связан с задающим генератором через фильтр соответствующих частот.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ВИБРОСТЕНД;;:;0:п:РТ08 | 1973 |
|
SU398853A1 |
| Электрогидравлический вибростенд | 1978 |
|
SU796685A1 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР | 2001 |
|
RU2204846C1 |
| Устройство управления вибрационным источником сейсмических сигналов | 1977 |
|
SU661460A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1405024A1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU849134A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР Л1ОЩНОСТИ ДЛЯ ДУГОВЫХ ЭЛЕКТРОПЕЧЕЙ | 1969 |
|
SU256127A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |