,1
П|редложе1и1ое устройство тредназлачеиа для автоматизацин управления самолетом цри ее движении аю земле.
Известные ycTipo&CTBa для ущра.вления самолетом на взлетно-посадочной полосе содержат электрагидроп-ривод испол1нительного ме.ханизма, датчн1ки inapa ieTipoB движения са.молета и состояния взлетно-посадочной полосы, а та/кже вычислительный блок, Связанный с приводом. Однако этн устройства не обеспечивают максимальной ма1неВ;ренности самолета при eiro движении аю земле.
Дредложенное устройство отличается от нзвестиых тем, -что в нем установлены подключенный К 1ВЫХОДУ преобразующего блока дополнительный Сервонривод и .последовательно соединенное с ни,м регулируемое звено утора, через которое недали летчн ка связаны с золотншсам (прн.вода стойки, что /позволяет упростить управление и повысить маневренность салюлета при движении тю зе.мле.
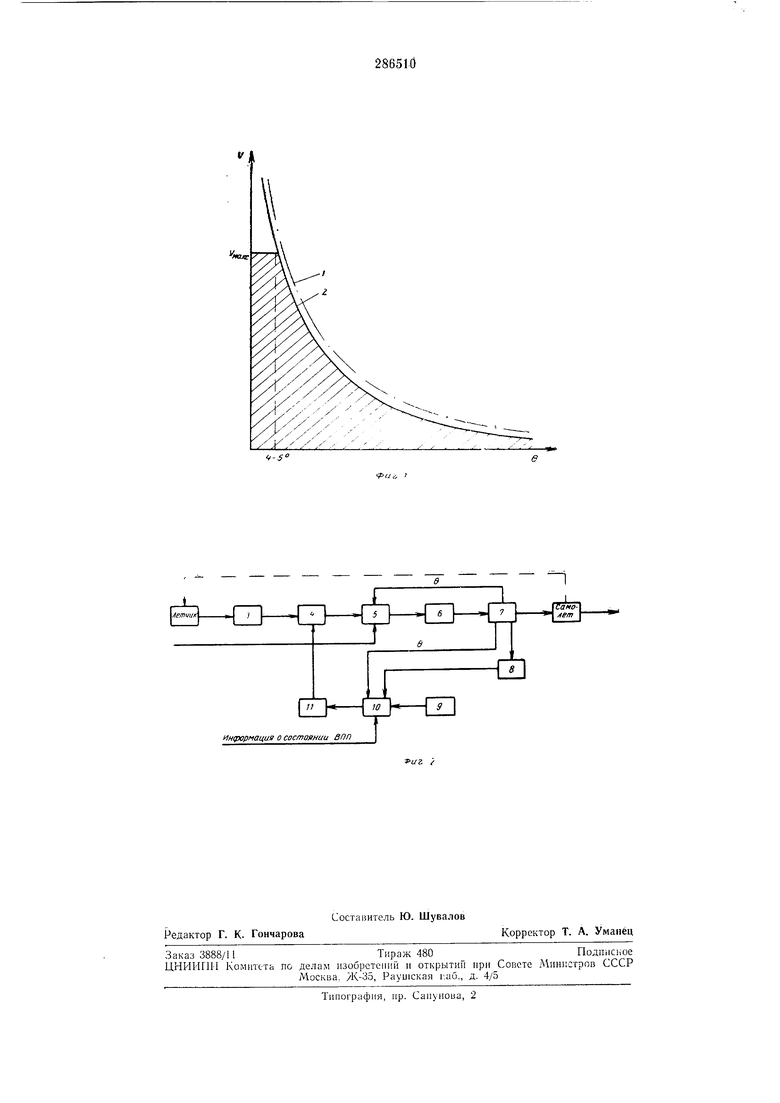
Суп1,ность изобрете1П1я состоит в обеспечении функциональной зависимости максимально возможного угла поворота в„акс носовой стойки шасси туте-м автомати ческого монотонного из.меиения уровня ограничения угла поворота в зависимости от скорости v движения самолета то земле с учетом интенсивности тор(Можения и хара ктеристи к взлатно-лосадочной (полосы,
Для каждого самолета может быть составлено уразнеиие, о-пределяющее границу бокового скольжения по углу -поворота носовой стойки шасси в зависимости от скорости движення. :коэффициента трения колес о (покрытие взлетно-посадочной полосы (ВПП), хара;ктеризуюн1его состояние нокрытия ВПП; от обжатия амортизатора носовой CToiixn inacси, характеризующего напрузку :)ia носовую
стойку, которая зависит от скорости и интенсивности торможения колесалп основных стоек. Кроме того, .максимальный угол 1иоворота, соответствующий границе скольжения, зависит от геометрических и весовых параметров
самолета (база, колея и высота шасси, центровка и моменты Н|нерции самолета и т. д.), а та.кже угловой скорости новорота носовой стойки.
В 1Предложенл1ом устройстве значительное
новышение .мановренности самолета шри движении но зел1ле достигается за счет изменения ограничения -максимальных углов ;поворота ;по закону, эквиднста.чтно.му границе бокового скольжения и отличающемуся от неге
на величину заПаса.
На фшг. 1 шриведена диаграмма поворота носовой стойки, где 1 - бокового скольжения; 2 - кривая изме:нения малчсимально возможных углов поворота стойки,
ния угла поворота в существующих си-стемах; соотношение площадей всей заштрихованной области И SOiHbi слава от штриховой линии характеризует увеличение маневренности самолета при ионользава1нии предложенного устройства.
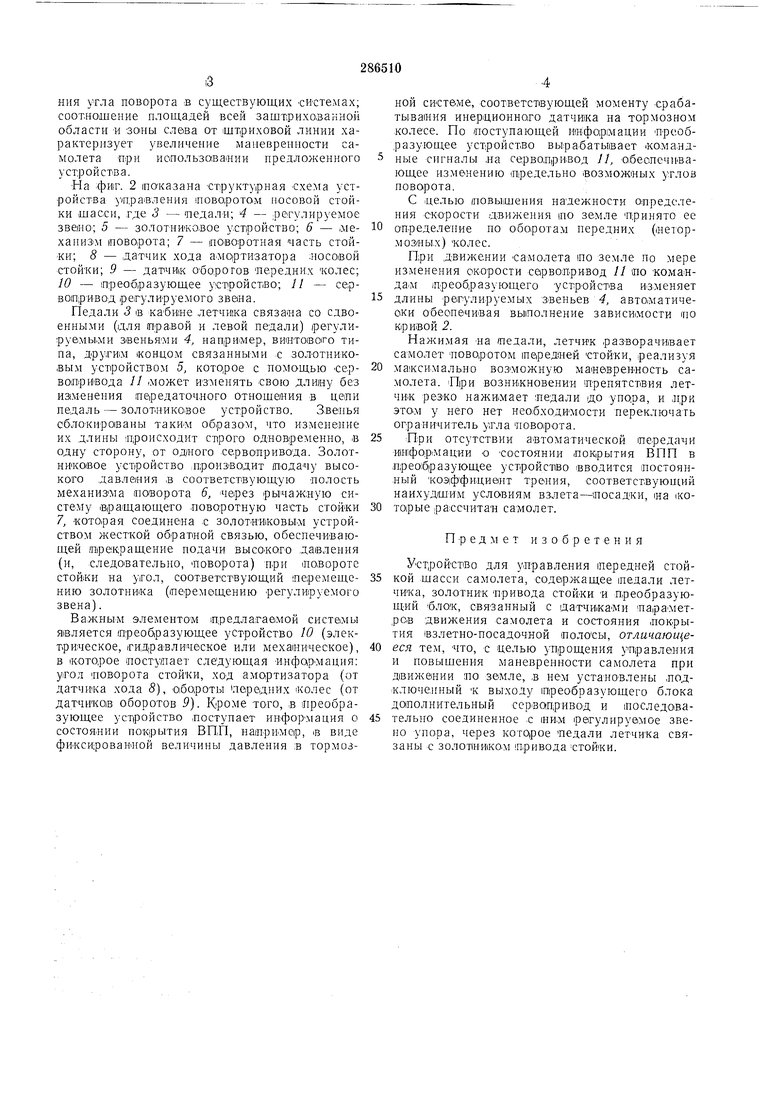
На фи|г. 2 (показана CTpyKTyipnaH схема устройства управления 1пово;ротам носовой стойки шасси, где 3 - педали; 4 - регулируемое звеяю; 5 - золотиико.вое устройство; 6 - iMeханиЗМ |повО(рота; 7 - поворотная часть стойКи; 5 - датчик хода а-мортизатора яосоеой стойки; 9 - датчИ|к Оборогов иередпих колес; 10 - преобразующее устройство; 11 - сервопривод регулируемого звана.
Педали 3 е кабине летчи ка связана со сдвоенными (для правой и левой педали) регулируемыми звеньями 4, например, винтового типа, други1М концом связанными с золотниковы.м устройством 5, которое с помощью сервопривода // .может изменять свою длину без изменения передаточного отнощания в цепи педаль-золотниковое устройство. Звенья сблокир01ваны образОМ, что измепе:11ие их длины П:роисходит строго одновременно, в одну сторону, от одиого сервопривода. Золотииковое устройство .производит иодачу высокого давления в соответствующую полость мехапизма поворота 6, через ры чажяую систему вращающего поворотную часть стойки 7, кото.рая соединена с золотни1ковы.м устройством жесткой обратной связью, обеспечивающей прекращение подачи высокого давления (и, следователь о, поворота) при повороте стойки на угол, соответствующий перемещению золотника (перемащению регулируемого звена).
Ва.жным элементом предлагаемой системы является преобразующее устройство 10 (электрическое, 1ГИ1 ра:Влическое или механическое), в которое поступает следующая пнфарМация: угол поворота стойки, ход амортизатора (от датчика хода 5), «бороты передних колес (от датчиков оборотов 9). Кроме того, в преобразующее устройство поступает инфорЛ1ация о состоянии покрытия ВПЛ, папрИМср, в виде фиксированной величины давления в тормозной системе, соответствующей моменту срабатывания инерционного датчика на тормозном колесе. По поступающей информации преобразующее устройство вырабатывает ко,ма.ндные сигналы на сервопривод 11, 0|беопечпвающее изменению предельно возможных углов поворота.
С целью повьишения надежнОСти определения скорости движения ino земле принято ее
определение по оборотам передних (нетор.мозны.х) колес.
При движении самолета по земле ио мере изменения скорости сарвонривод 11 по команда.м преобразующего устройства изменяет
длины регулируемых звеньев, автоматически обеспечивая выполнение зависимости по кривой 2.
Нажимая «а шедали, летчиК разворачивает самолет поворотом передней стойки, реализуя
максимально возможную манавренность самолета. При возникновении препятствия летчик резко нажимает недали до упора, и лри этом у него нет необходимости переключать ограничитель угла поворота.
При отсутствии автоматической передачи и1И1фор(Мации о состоянии поК|рытия ВПП в ,прео бразующее устройство вводится постоянный коэффи.цие1пт трания, соответствуюи1.ий наихудшим условиям взлета-посадки, на (которые рассчитан самолет.
Предмет изобретения
Устройство для управления шередней стойкой шасси самолета, содержащее педали летчика, золотник привода стойки и преобразующнй блок, связанный с датчиками пара-метров движения самолета и состояния покрытия взлетно-посадочной полосы, отличающевся тем, что, с целью упрощения управления и повыщения маневренности самолета при движении по земле, в нем установлены .подключенный К выходу преобразующего блока дополнительный сервопривод и последовательно соединенное с ним рагулируамое зве}ю упора, через которое педали летчика связаны с золотни1ком Привода стойки.
t-S
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2017 |
|
RU2667411C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| ТРЁХСТОЕЧНОЕ ШАССИ СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2480377C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2018 |
|
RU2684961C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| ДВУХМОТОРНЫЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ НАЗЕМНОГО И ВОДНОГО БАЗИРОВАНИЯ С УКОРОЧЕННЫМ И ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ "ЛАДОГА-9 УВ" | 2001 |
|
RU2196707C2 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ И УСТРОЙСТВО КИРИЛЛОВА ВИЗУАЛЬНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА ИЛИ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2475424C1 |
| Способ мониторинга технического состояния планера и шасси летательного аппарата и устройство для его осуществления | 2017 |
|
RU2678540C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ), ВЗЛЕТНО-ПОСАДОЧНОЕ ШАССИ (ВАРИАНТЫ) И СПОСОБ ПОДЪЕМА В ВОЗДУХ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2012 |
|
RU2588198C2 |
| Способ торможения летательного аппарата при посадке | 2019 |
|
RU2722597C1 |