Данное изобретение относится к системам автоматического регулирования. Устройство предназначено для коррекции и стабилизации систем, работающих при высоком уровне шума.
Известны фильтры ,с переменной структурой, содержащие линейное динамическое звено с блоком масштабных коэффициентов. Они не обеспечивают раздельной иастрой.ки амплитудной и фазовой частотных характеристик.
Предложенный фильтр обеспечивает инвариантную настройку частотных характеристик при высоких уровнях помех На входе, причем в большом числе частотных диапазопо,в. Это достигается благодаря тому, что в фильтре установлен сумматор, подключенный к выходу масштабных коэффициентов линей пого динамического звена, и ко входу линейного динамического звена параллельной связью подключена нелинейная цепь, составленная из поапедовате.:1ьно -соединенных дифференциатора с блоком фильтров, управляемого нелинейного элемента сравнения с подключенными к нему динамическимИ звеньями и форсирующего звена со вторым блоком масштаб ibix коэффициентов, выход которого подсоединен к сумматору.
ных к сумматору непосредственно или через Н:нвертор.
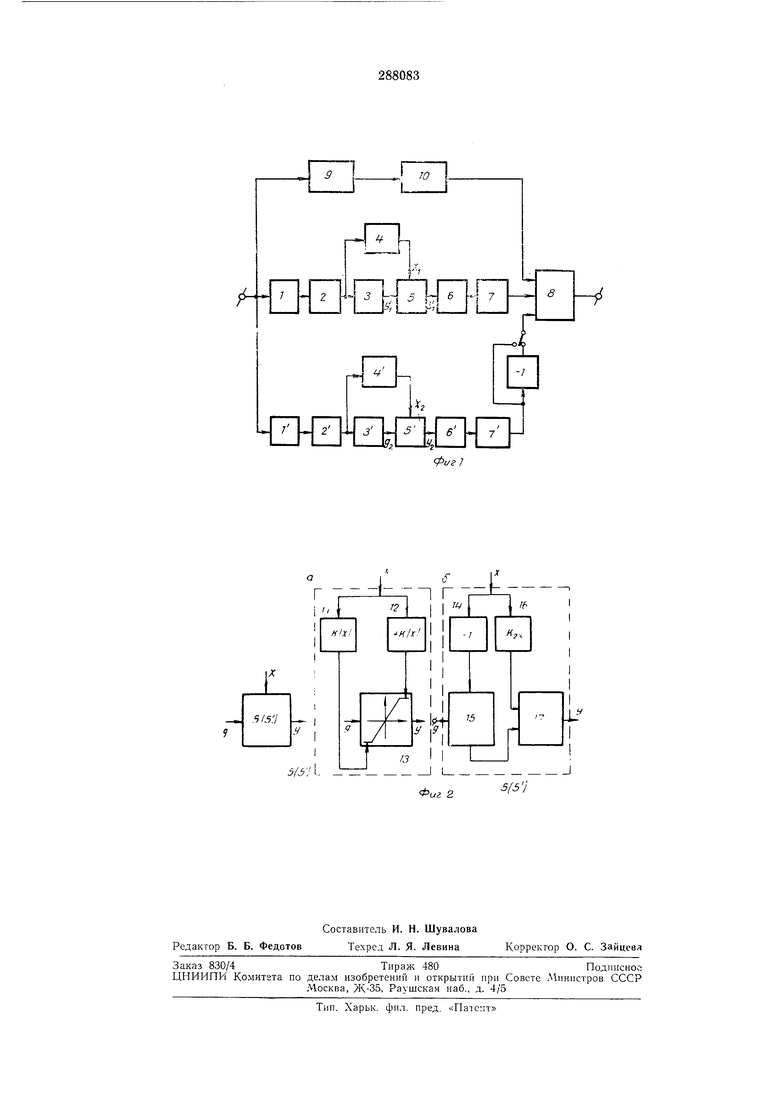
На фиг. 1 представлена блок-схема устройства; на фиг. 2а и б - варианты реализации схемы управляемых нелинейных элементов.
Устройство содержит зэенья / и / получения зафильтрованной производной в.чодного сигнала; блоки фильтров 2 и 2, динамические звенья 3 и 3 4 я 4 первого и второго порядков с разными параметрами, управляемые иелинейные элементы сравнения знаков и амплитуд сигналов 5 и 5, форсирующие звенья 6 и б , блоки масштабных коэффициентов 7 и 7, сумматор 8 и линейное динамическое звено 9 с блоком масштабных коэффициентов 10.
Управляемые нелинейные элементы содержат устройства // и 12 выдачи абсолютного
значения сигналов, нелинейный элемент 13 типа «ограничения с регулируемым ограничением, 1инвертирующий элемент 14, блок совпадения знаков 15, блок масштабных коэффициентов 16 и сумматор 17.
Входной сигнал подается на звено получения зафильтрованной производной входного сигнала / или / и на выход параллельной линейной цени, состоящей из паследователыно включенных динамического звена 9 и блока
рого соединен с одщим из входов сумматора 8. С другими входами сумматора соединены выходы параллельных нелинейных цепей. Рассмотрим прохождение сигналов по одной из параллельных нелинейных цепей.
Сигнал с выхода звена / получе.ния зафнльтрованной производной входиого сигнала через блок фильтров 2 и динамическое звеио 3 подается на управляющ ий вход нелинейного элемента сра:вне 1ня знаков и амплитуд 5 (сигнал gt). На управляемый вход этого нели нейного элемента подается сигнал X с выхода блока фильтров 2 через дииамическое звено 4Нелппейный элемент 5 подключает ко входу корректирующего звена 6 сигналы с выхода динамического 4 Или 3 (сигнал д ) 15 защисимостн от совпадения знаков сигналов, приходящих на входы нелжтейных устройств сравнения, и от соотношепия величин, приходящих на нелинейный элемент сигналов. В случае использования «елипейного элемента 4 по схеме фиг. 2а это выполняется следующим образом.
При значениях сигналов gi на выходе дпнампческого звена ., меньщих, чем сигналы с выхода устройств // и 12 выдачи абсолютных значений сигналов, по соответствующему знаКу на вход форсирующего звена 6 подается сигнал gl с :выхода динамического звена 3 со своим знаком. В случае же обратных соотношений величин на вход форсирующего звена подается сигнал, пропорциональный величине сигнала Xi с выхода динамического звена 4, со знаком, определяемым знаком сигнала i.
В случае использования нелинейного элемента 5 по схеме фиг. 2,6 схема работает аналогично предыдущей, используя только сравнение знаков, но без сравнения амплит /д сигналов g и х. Сигнал с выхода форсирующего звена 6 через бло1К масщтабных коэффнциенТО(В 7 подключается на вход суммирующего элемента фильтра; на один из входов которого подключен сигнал с выхода блока масштабных коэффициентов 10 линейной цепи.
Указанные сигналы складываются на суммирующем эле.менте 8 или с постоянными коэффициентами iHo частотам (определяется блоками масштабных коэффициентов 10 и 7) или с изменяемыми по одинаковому закону, определяемому динам1ическими звеньями 7, 2, 4, 6 9 по соответствующей цепи. Аналогичное подключение сигналов происходит и по другим нелипейиым цепям. Фазовые характеристики динамических звеньев 3, и 9 при таком суммировании в основном определяют угол между суммируемыми векторами и, при 1постоянном значении их модулей па разных частотах или при измеиении их по одннаковому закону, нолностью определяют модуль суммарного вектора, т. е. его aмплiИтудную характеристику. Фазовая характеристика его ОПределяется при этом коэффициентами суммирования параллельных цепей. Так
как коэффициенты суммирования могут выбираться с большой свободой, то это и обусловливает получение еще более резко выраженных неминимально-фазовых свойств всего фильтра, чем это имеет место в одной нелинейной цепи.
При сумм1ировании сигналов с нескольких нелинейных цепей с динамическими звеньями первого и второго порядка, подключенными последовательно с разнесенными друг относительно друга частотами среза, возможно создание амплитудных и фазовых характеристик, линеаризованных по первой гармонике, с больщой независимостью друг от друга. Папример, в случае необходимости (что обычно имеет место нри решении задач повыщения быстродействия без снижения стенени устойчивости) В цепь некоторых из параллельных нелинейных звеньев после форсирующего звена включается о«шертирующий элемент. Па частотах входных сигналов до частоты среза динамического звена данной нелинейной цепи сигнал фильтра равен (разности сигнала этой цепи и ей параллельных. После частоты среза этот ситнал векторно суммируется с сигналом линейной цепи 9, 10 (в случае, например, использования в качестве динамического звена этой нелинейной цепи звена второго порядка).
Таким образом, фильтр может обеспечить при соответствующем количестве параллельных нелинейных цепей и их суммировании с линейным звеном несколько диапазонов интенсивного изменения коэффициентов усиления сигнала управления корректируемой системы ири поло1ЖИтель}ЮЙ или нулевой суммарной фазовой характеристике фильтраПредмет изобретения
1.Фильтр с переменной структурой, содержащий линейное динамическое звено с блоком масштабных коэффициентов, отличающийся тем, что, с целью обеснечения повышения степени инвариантности настроек а: шлитудных и фазовых частотных характеристик при высоком уровне иомех на входе, в нем установлен сумматор, подключенный к выходу блока масщтабных коэффициентов линейного динамического звена, и ко входу линейного динамического звена параллельной связью подключена нелинейная цепь, составленная «3 последовательно соединенных дифференциатора с блоком фильтров, управляемого нелинейного элемента сравнения с подключенными к нему динамическими звеньями и форсирующего звена со вторым блоком масщтабных коэффициентов, выход которого подсоединен к сумматору.
2.Фильтр но п. 1, отличающийся тем, что, с целью расширения числа частотных диапазонов, в которых возможно интенсивное изменение коэффициента передачи, в нем установлен ряд параллельных нелинейных цепей, подсоедниенных к сумматору непосредственно или через инвертор.
ГЛ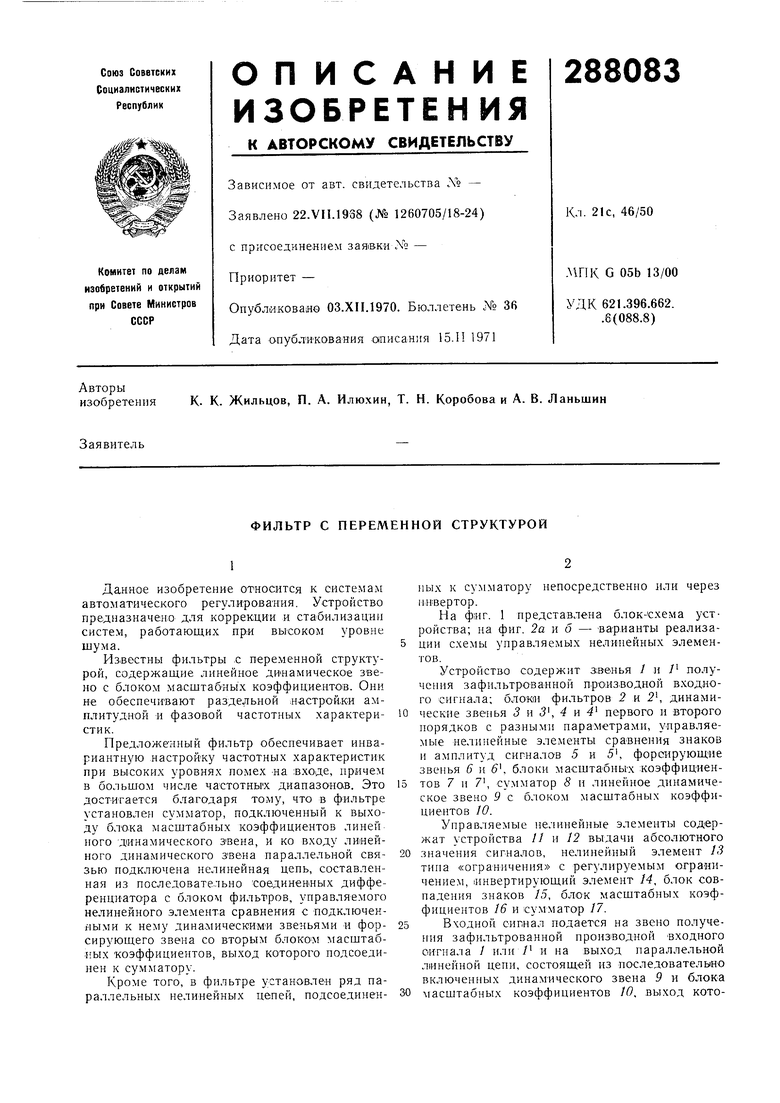
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОЬ РЕГУЛИРОВАНИЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ, ОПИСЫВАЕМЫХ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИп-ого ПОРЯДКА | 1969 |
|
SU239405A1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU320805A1 |
| Устройство для моделирования упругого гистерезиса | 1986 |
|
SU1397946A1 |
| ДАТЧИК РЕАКТИВНОЙ МОЩНОСТИ РЕЗКОПЕРЕМЕННОЙ НАГРУЗКИ ДЛЯ УПРАВЛЕНИЯ КОМПЕНСАТОРОМ РЕАКТИВНОЙ МОЩНОСТИ | 1994 |
|
RU2081494C1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| Фазосравнивающий релейный орган | 1977 |
|
SU702448A1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |