Изобретение относится к судостроению, в частности к устройствам для управления бортовыми рулями успокоителя качки судна.
Известно устройство для управления бортовыми рулями успокоителя качки судна, содержащее формирователь сигнала управления и усилитель с ограничением, первый вход которого соединен с выходом функционального преобразователя, а другой вход - с выходом выпрямителя, вход которого связан с выходом датчика положительной обратной связи, при этом выход усилителя с ограничением связан с входами следящих приводов поворота бортовых рулей, один из которых кинематически связан с упомянутым датчиком положительной обратной связи.
Недостатком данного устройства является зависимость показателя кратности умерения качки от внещних факторов: волнового возмущения и динамических характеристик судна. То и другое изменяется в щироких пределах, что затрудняет принятие решения о действительном техническом состоянии успокоителя.
Цель изобретения - повышение эксплуатационной надежности устройства путем обеспечения контроля работы и технического диагностирования.
Указанная цель достигается тем, что устройство для управления бортовыми рулями успокоителя качки судна, содержащее формирователь сигнала управления и усилитель с ограничением, первый вход которого соединен с выходом множительного устройства, один вход которого соединен с выходом функционального преобразователя, а другой вход - с выходом выпрямителя, вход которого связан с выходом датчика положительной обратной связи, при этом выход усилителя с ограничением связан с входами следящих приводов поворота бортовых рулей, один из которых кинематически связан с упомянутым датчиком положительной обратной связи, снабжено двумя датчиками обратной связи, ключом, тремя коммутирующими элементами, генератором тестового сигнала, блоком пяти фильтров Лагерра, фильтром низких частот, вычислительным устройством и устройством регистрации, причем выход первого коммутирующего элемента соединен с вторым входом вышеуказанного усилителя с ограничением, первый вход - с выходом выщеуказанного формирователя сигнала управления, а второй вход через фильтр низких частот - с выходом генератора тестового сигнала, связанного одновременно с входом блока пяти фильтров Лаггера, каждый из пяти выходов которого соединен через второй коммутирующий элемент с первым входом вычислительного устройства, к второму входу которого подключен выход третьего коммутирующего элемента, входы которого соединены с выходами датчиков обратной связи, кинематически связанными со следящими приводами поворота бортовых рулей, при 5 этом выход вычислительного устройства соединен с входом устройства регистрации, а выход датчика положительной обратной связи соединен с входом выпрямителя через ключ.
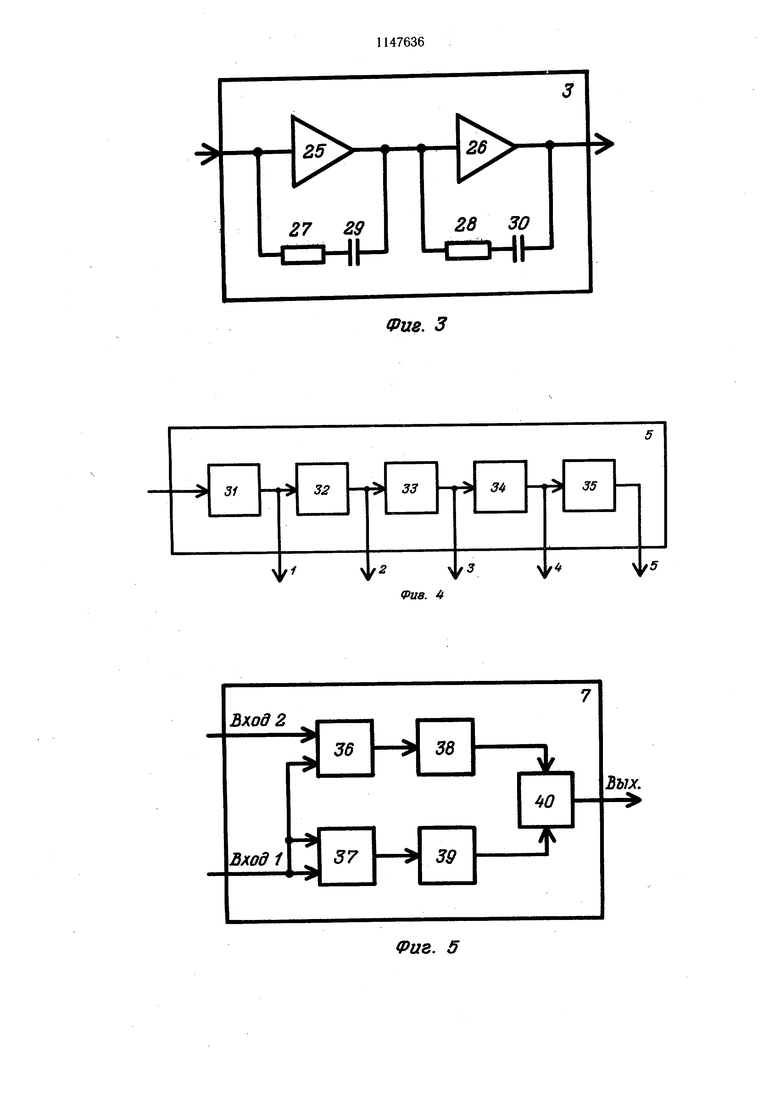
На фиг. 1 представлена блок-схема устройства для управления бортовыми рулями успокоителя качки судна; на фиг. 2 - блоксхема формирователя сигнала управления, на фиг. 3 - блок-схема фильтра низких
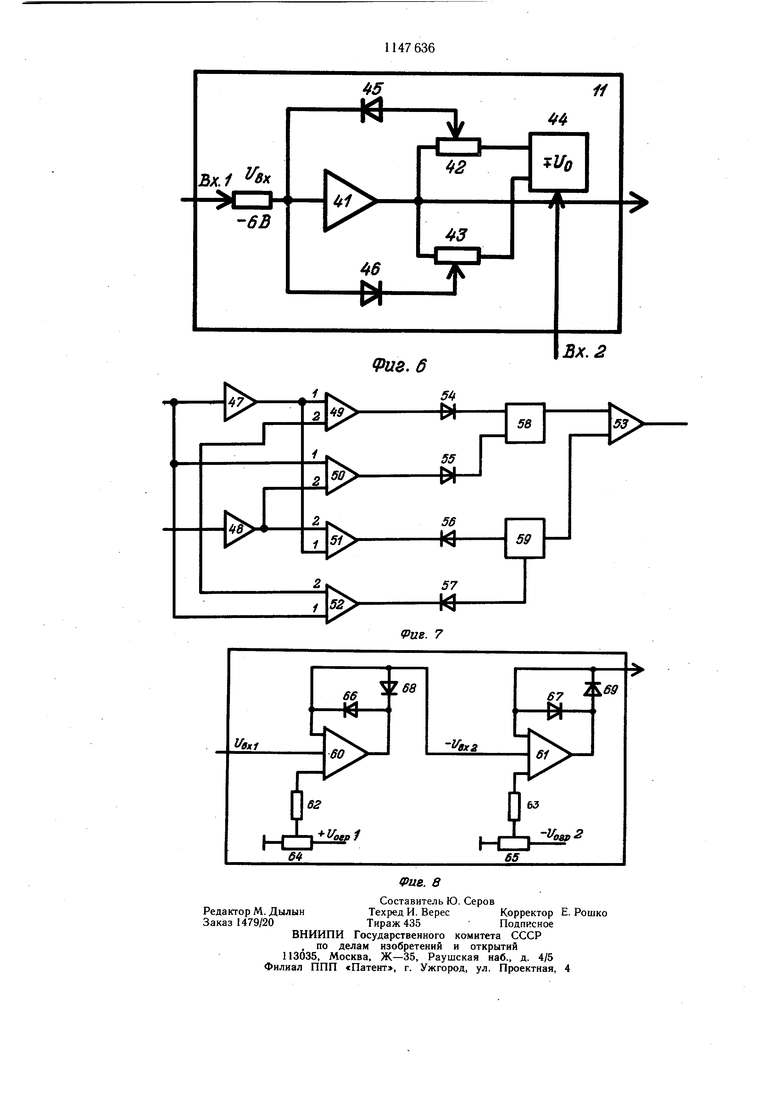
5 частот; на фиг. 4 - блок-схема блока пяти фильтров Лагерра; на фиг. 5 - блок-схема вычислительного устройства; на фиг. 6 - блок-схема усилителя с ограничением; на фиг. 7 - блок-схема множительного устройства; на фиг. 8 - блок-схема функционального преобразователя и графики выходногосигнала и напряжения.
Устройство (фиг. 1) содержит формирователь 1 сигнала управления, выход которого соединен с первым входом первого коммутирующего элемента 2, второй вход которого через фильтр 3 низких частот соединен с выходом генератора 4 тестового сигнала, связанного одновременно с входом блока 5 пяти фильтров Лагерра, каждый из пяти выходов которого соединен с соответQ ствующим входом второго коммутирующего элемента 6, выход которого соединен с первым входом вычислительного устройства 7, второй вход которого через третий коммутирующий элемент 8 соединен с дополнительными датчиками 9 обратной связи, а
выход - с входом устройства 10 регистрации. Второй вход усилителя 11 с ограничением соединен с выходом первого коммутирующего элемента 2, а первый вход - с выходом множительного устройства 12, один вход которого соединен с выходом функционального преобразователя 13, а другой вход через последовательно соединенные выпрямитель 14 и ключ 15 подключен к выходу датчика 16 положительной обратной связи. Выход усилителя 11 с ограничением соединен с входами следящих приводов 17 по5ворота бортовых рулей, с которыми кинематически связаны дополнительные датчики 9 обратной связи и датчик 16 положительной обратной связи. К входу функционального преобразователя 13 подключен
0 датчик скорости хода (не показан).
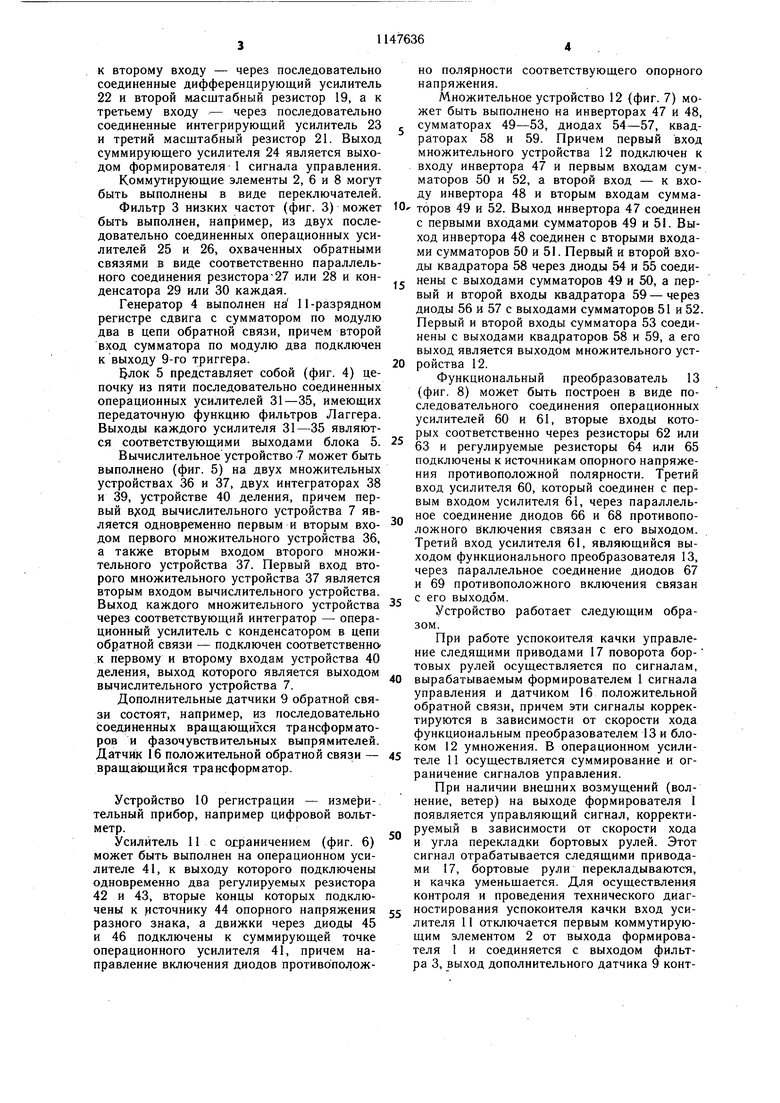
Формирователь 1 сигнала управления (фиг. 2) содержит, например, датчик 18 угловой скорости качки, масштабные резисторы 19, 20 и 21, а также дифференцирующий, интегрирующий и суммирующий операционные усилители 22, 23 и 24, причем датчик 18 угловой скорости качки подключен к одному из входов суммирующего усилителя 24 через масштабный резистор 20, к второму входу - через последовательно соединенные дифференцирующий усилитель 22 и второй масштабный резистор 19, а к третьему входу - через последовательно соединенные интегрирующий усилитель 23 и третий масщтабный резистор 21. Выход суммирующего усилителя 24 является выходом формирователя 1 сигнала управления. Коммутирующие элементы 2, 6 и 8 могут быть выполнены в виде переключателей. Фильтр 3 низких частот (фиг. 3) может быть выполнен, например, из двух последовательно соединенных операционных усилителей 25 и 26, охваченных обратными связями в виде соответственно параллельного соединения резистора27 или 28 и конденсатора 29 или 30 каждая. Генератор 4 выполнен на 11-разрядном регистре сдвига с сумматором по модулю два в цепи обратной связи, причем второй вход сумматора по модулю два подключен к выходу 9-го триггера. блок 5 представляет собой (фиг. 4) цепочку из пяти последовательно соединенных операционных усилителей 31-35, имеющих передаточную функцию фильтров Лаггера. Выходы каждого усилителя 31-35 являются соответствующими выходами блока 5. Вычислительное устройство 7 может быть выполнено (фиг. 5) на двух множительных устройствах 36 и 37, двух интеграторах 38 и 39, устройстве 40 деления, причем первый . вычислительного устройства 7 является одновременно первым и вторым входом первого множительного устройства 36, а также вторым входом второго множительного устройства 37. Первый вход второго множительного устройства 37 является вторым входом вычислительного устройства. Выход каждого множительного устройства через соответствующий интегратор - операционный усилитель с конденсатором в цепи обратной связи - подключен соответственна к первому и второму входам устройства 40 деления, выход которого является выходом вычислительного устройства 7. Дополнительные датчики 9 обратной связи состоят, например, из последовательно соединенных вращающихся трансформаторов и фазочувствительных выпрямителей. Датчик 16 положительной обратной связи - вращающийся трансформатор. Устройство 10 регистрации - изме})и-. тельный прибор, например цифровой вольтметр. Усилитель 11с ограничением (фиг. 6) может быть выполнен на операционном усилителе 41, к выходу которого подключены одновременно два регулируемых резистора 42 и 43, вторые концы которых подключены к источнику 44 опорного напряжения разного знака, а движки через диоды 45 и 46 подключены к суммирующей точке операционного усилителя 41, причем направление включения диодов противоположно полярности соответствующего опорного напряжения. Множительное устройство 12 (фиг. 7) может быть выполнено на инверторах 47 и 48, сумматорах 49-53, диодах 54-57, квадраторах 58 и 59. Причем первый вход множительного устройства 12 подключен к входу инвертора 47 и первым входам сумматоров 50 и 52, а второй вход - к входу инвертора 48 и вторым входам сумматоров 49 и 52. Выход инвертора 47 соединен с первыми входами сумматоров 49 и 51. Выход инвертора 48 соединен с вторыми входами сумматоров 50 и 51. Первый и второй входы квадратора 58 через диоды 54 и 55 соединены с выходами сумматоров 49 и 50, а первый и второй входы квадратора 59 - через диоды 56 и 57 с выходами сумматоров 51 и 52. Первый и второй входы сумматора 53 соединены с выходами квадраторов 58 и 59, а его выход является выходом множительного устройства 12. Функциональный преобразователь 13 (фиг. 8) может быть построен в виде последовательного соединения операционных усилителей 60 и 61, вторые входы которых соответственно через резисторы 62 или 63 и регулируемые резисторы 64 или 65 подключены к источникам опорного напряжения противоположной полярности. Третий вход усилителя 60, который соединен с первым входом усилителя 61, через параллельное соединение диодов 66 и 68 противоположного включения связан с его выходом. Третий вход усилителя 61, являющийся выходом функционального преобразователя 13, через параллельное соединение диодов 67 и 69 противоположного включения связан с его выходом. Устройство работает следующим образом. При работе успокоителя качки управление следящими приводами 17 поворота бортовых рулей осуществляется по сигналам, вырабатываемым формирователем 1 сигнала управления и датчиком 16 положительной обратной связи, причем эти сигналы корректируются в зависимости от скорости хода функциональным преобразователем 13 и блоком 12 умножения. В операционном усилителе 11 осуществляется суммирование и ограничение сигналов управления. При наличии внешних возмущений (волнение, ветер) на выходе формирователя I появляется управляющий сигнал, корректируемый в зависимости от скорости хода и угла перекладки бортовых рулей. Этот сигнал отрабатывается следящими приводами 17, бортовые рули перекладываются, и качка уменьшается. Для осуществления контроля и проведения технического диагностирования успокоителя качки вход усилителя 11 отключается первым коммутирующим элементом 2 от выхода формирователя 1 и соединяется с выходом фильтра 3, выход дополнительного датчика 9 контролируемого привода подключен к второму входу вычислительного устройства 7.
С выхода генератора 4 на вход фильтра 3 и вход блока 5 поступает тестовый сигнал - инверсно повторяющаяся псевдослучайная последовательность максимальной длины отрицательная. Указанный пробный сигнал отвечает следующим требованиям: некоррелированность с остальными воздействиями на успокоитель качки, ортогональность с системой функций Лагерра. После отработки следящим приводом тестового сигнала на выходе вычислительного устройства 7 сигнал пропорционален первому коэффициенту Фурье разложения импульсной передаточной функции (ИПФ) статистически линеаризованной модели системы успокоитель качки - фильтр низких частот.
Коэффициенты Фурье вычисляются устройством 7 по формуле
Г -JlrClCOiYnJ-lL
- )}
где MT{ }- математическое ожидание функции, заключенной в скобках; y(t) -сигнал с выхода дополнительного датчика 9;
Vn(i) -сигнал с п-го выхода блока 5. Остальные коэффициенты разложения импульсной передаточной функции в ортогональный ряд вычисляются аналогично при подключении коммутирующим элементом 2 соответствующего выхода блока 5 к первому входу вычислительного устройства 7. Устройство 10 регистрации фиксирует вычисленные значения коэффициентов разложения.
С помощью коммутирующего элемента 8 производится выбор контролируемого привода бортовых рулей.
Применение фильтра 3 низких частот вызвано необходимостью формирования на входе усилителя 11 сигнала, имеющего нормальную плотность распределения вероятности, так как сигналы инверсно повторяющейся псевдослучайной последовательности максимальной длины имеют вырожденное распределение плотности вероятности, принимая только два значения ±Uo , и непригодны для диагностирования нелинейных систем. Передаточная функция фильтра представляет собой передаточную функцию фильтра Баттерворта четвертого порядка и имеет плоскую амплитудно-частотную характеристику в диапазоне частот О-0,8 Гц, для целей диагностирования достаточно наличие белого щума на входе фильтра, а не на его выходе.
При исправном техническом состоянии успокоителя качки ИПФ статистически линеаризованной модели системы фильтр низких частот - успокоитель качки имеет известный вид, определяемый техническими требованиями на успокоитель качки, т. е. известны и коэффициенты разложения ИПФ в ортогональный ряд, которые уточняются по результатам мореходных испыта5 НИИ. Отклонение значений коэффициентов от их паспортных значений свидетельствует об ухудшении технического состо$}ния устройства управления успокоителем качки судов или привода поворота бортовых
0 РУ- ейДальнейщая стратегия поиска неисправности базируется на использовании тех же блоков (генератора 4, блока 5 пяти фильтров Лагерра, трех коммутирующих устройств 2, 6 и 8, вычислительного устройства 7 и регистрирующего устройства 10, фильтра 3) для локализации неисправности до узла, охваченного обратной связью. Для достижения этой цели необходимо ключом 15 разомкнуть выход датчика 16 от входа выпрямителя 14 и повторить проверки, что позволяет определить неисправный следящий привод поворота бортовых рулей либо неисправность устройства управления.
Принцип действия формирователя 1 сигнала управления; сигнал управления, поступающий на вход формирователя 1 дифференцируется и интегрируется на усилителях 22 и 23, масщтабируется на резисторах 19, 20 и 21, после чего все три составляющие суммируются на усилителе 24. Фильтр 3 производит сглаживание вы сокочастотных составляющих тестового сигнала с генератора 4 сначала на усилителе.25, охваченном обратной связью на резисторе 27 и конденсаторе 29, а затем на усилителе 26 с обратной связью на резисторе 28 и конденсаторе 30.
В блоке 5 тестовый сигнал с выхода усилителя 31 поступает одновременно на вход усилителя 32 и на первый выход блока 5, с выхода усилителя 32 - на вход усилителя 33 и второй выход блока 5 и т. д. Выход
0 усилителя 35 является пятым выходом блока 5.
Вычислительное устройство 7 работает следующим образом.
Сигнал на выходе множительного устройства 36 пропорционален произведению сигналов, поступающих на первый и второй входы устройства 7, а на выходе множительного устройства 37 - квадрату сигнала на первом входе устройства 7. Сигналы с выходов множительных устройств 36 и 37 поступают на входы интеграторов 38 и 39 соответственно, где осуществляется их осреднение, а сигналы, пропорциональные средним значениям результатов умножения, поступают на входы устройства деления 40,
5 выход которого является выходом вычислительного устройства 1.
Усилитель 11 с ограничением работает следующим образом.
Сигналы на выходе усилителя 41 пропорциональны сигналам на -его входе до тех пор, пока потенциал на резисторах 42 или 43 не превышает потенциала источника 44 опорного напряжения соответствующей полярности. В случае достижения равенства потенциалов диоды 45 или 46 обеспечивают постоянное значение сигнала на выходе усилителя 41, соответственно определяемое положением движков потенциометров 42 или 43.
Множительные устройства 12, 36 и 37 работают (фиг. 7) следующим образом.
Входные величины сигналов через инверторы 47 и 48 поступают на входы суммирующих усилителей 49-52, причем на выходах усилителей 51 и 52 образуются суммы этих сигналов и минус сигналов, а на выходах усилителей 49 и 50 - разности сигналов и минус сигналов. Одна из двух сумм обязательно имеет положительный знак, одна из двух разностей - отрицательный знак. Суммы и разности с усилителей 49-52 через диоды 54-57 поступают на функциональные устройства 58 и 59, осуществляющие возведение в квадрат. Функциональные устройства 58 и 59 возводят в квадрат сумму и разность входных сигналов, а операционный усилитель 59 производит вычитание квадрата разности из квадрата суммы.
В функциональном преобразователе 13 при положительном сигнале на входе усилителя 60 и отрицательном напряжении - Uopri выходной сигнал появляется, когда диоды 67 и 68 обеспечивают пбявление на выходе только положительного сигнала. При отрицательном сигнале на входе
операционного усилителя 61 и положительном опорном напряжении Uorpt выходной сигнал появляется, когда /Uexi/ /KaUorpz/. Диоды 67 и 69 обеспечивают появление на выходе только отрицательного сигнала. Последовательное соединение устройств на базе усилителей 60 и 61 дает график выходного напряжения.
Устройство позволяет дать количественную оценку изменения качества работы успокоителя качки по величине изменения
коэффициентов разложения ИПФ линейной модели.
Технико-экономическая эффективность данного устройства определяется повышением такого показателя эксплуатационной
надежности как коэффициент готовности, так как позволяет в отличие от прототипа (базовый объект) проводить диагностирование успокоителя качки силами личного состава в межпоходовый период, выявляя скрытые накапливающиеся дефекты. Повышается дбЬтоверность оценки диагностирования, так как исключается влияние волнового возмущения и динамических характеристик судна. Устройство обеспечивает глубину диагностирования до привода поворота бортовых рулей путем проведения проверки при разомкнутом ключе.
27 29
26
28 30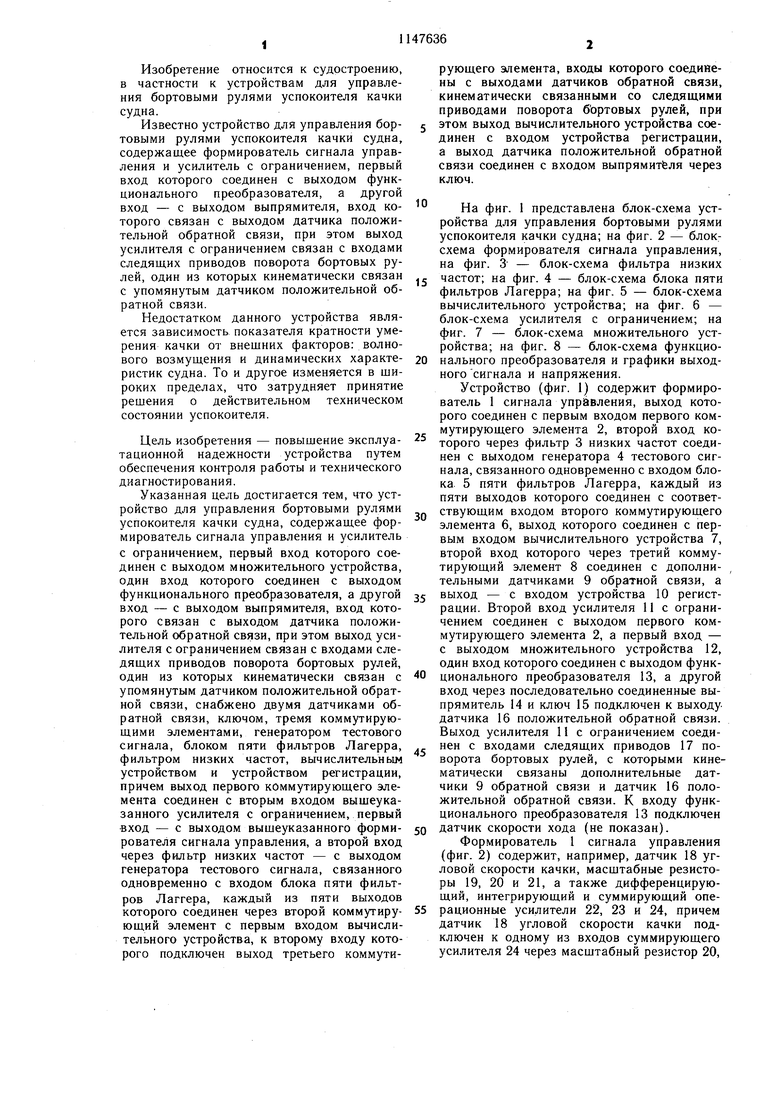
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления успокоителем качки судов | 1981 |
|
SU971699A2 |
| Устройство для управления успоко-иТЕлЕМ КАчКи СудОВ | 1979 |
|
SU796069A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УСПОКОИТЕЛЕМ КАЧКИ СУДНА | 1991 |
|
RU2013295C1 |
| Устройство для управления успокоителем качки судов | 1975 |
|
SU524731A1 |
| Устройство для формирования сигнала управления бортовыми рулями успокоителя качки судна | 1985 |
|
SU1252238A2 |
| Система управления бортовыми рулями успокоителя качки судна | 1976 |
|
SU597591A1 |
| Устройство управления успокоителем качки судов | 1973 |
|
SU481496A1 |
| Устройство для управления успокоителем качки судна | 1978 |
|
SU694418A1 |
| Система автоматического управления успокоителем качки судна | 1974 |
|
SU518413A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОРТОВЫМИ РУЛЯМИ УСПОКОИТЕЛЯ КАЧКИ СУДНА | 1971 |
|
SU314685A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ БОРТОВЫМИ РУЛЯМИ УСПОКОИТЕЛЯ КАЧКИ СУДНА, содержащее формирователь сигнала управления и усилитель с ограничением, первый вход которого соединен с выходом множительного устройства, один вход которого соединен с выходом функционального преобразователя, а другой вход - с выходом выпрямителя, вход которого связан с выходом датчика положительной обратной связи, при этом выход усилителя с ограничением связан с входами следящих приводов поворота бортовых рулей, один из которых кинематически связан с упомянутым датчиком положительной обратной связи, отличающееся тем, что, с целью повышения эксплуатационной надежности путем обеспечения контроля работы и технического диагностирования, оно снаб- Гп J( датчику скоро жено двумя датчиками обратной связи, ключом, тремя коммутирующими элементами, генератором тестового сигнала, блоком пяти фильтров Лагерра, фильтром низких частот, вычислительным устройством , и устройством регистрации, причем выход первого коммутирующего элемента соединен с вторым входом выщеуказанного усилителя с ограничением, первый вход - с выходом вышеуказанного формирователя сигнала управления, а второй вход через фильтр низких частот - с выходом генератора тестового сигнала, связанного одновременно с входом блока пяти фильтров Лаггера, каждый из пяти выходов которого соединен через второй коммутирующий элемент с первым входом вычислительного устройства, к второму входу которого подключен выход третьего коммутирующего элемента, входы которого соединены с выходами датчиков обратной связи, кинематически связанными со следящими приводами поворота бортовых рулей, при этом выход вычислительного устройства соединен с входом устройства регистрации, а выход датчика положительной обратной связи соединен с входом выпрямителя через ключ. я Т ода 8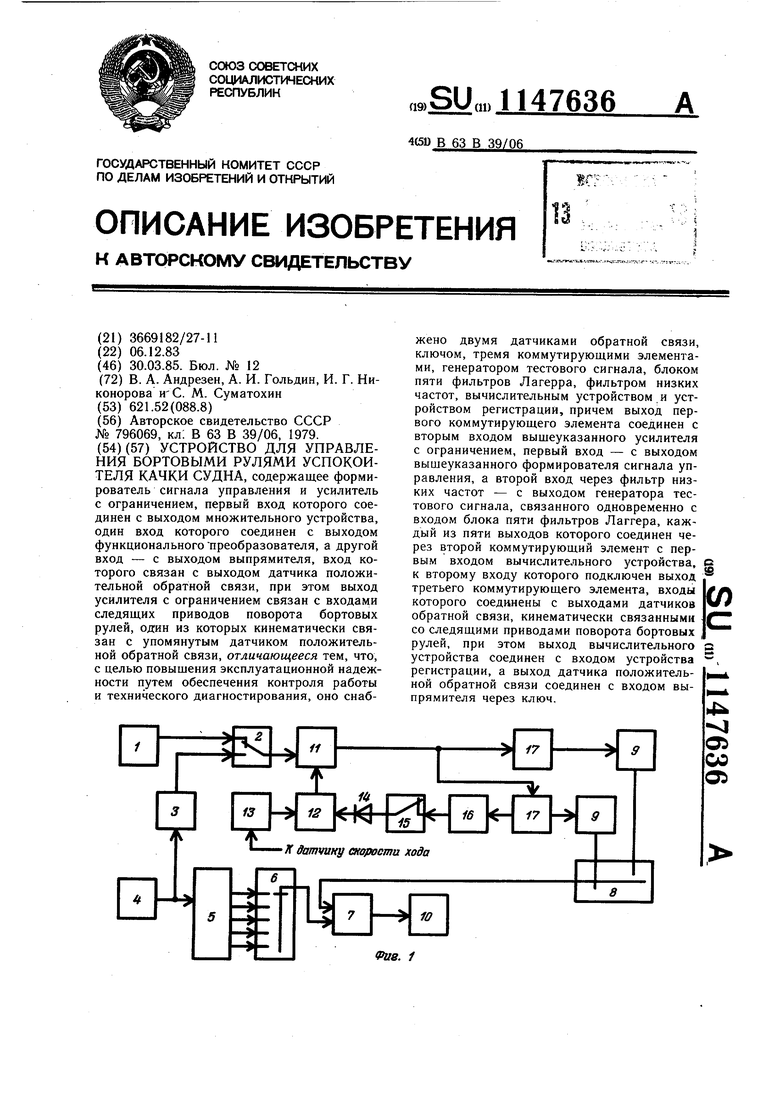
fPue, 3
Фиа. 4
Фиг. 5
| Устройство для управления успоко-иТЕлЕМ КАчКи СудОВ | 1979 |
|
SU796069A2 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
